歩行動作の製作 [サクラ大戦 光武 製作記]
今回は歩行動作の製作です。
ずっと前から歩く動作に興味があって、色々と調べていました。
今回製作した歩行動作の原理は、元々は別の模型に使おうと温めていたアイディアだったのですが、あいにく使う機会に恵まれず、放置されていたものです(^_^*)
光武を製作する、この機会にやっと実現出来ました。
色々と反省点はありますが、とりあえず動いてくれて良かったです。
さて、歩行の動きを再現するには、単純にカムとクランクを組み合わせただけでは上手く表現出来ません。
どうしても、カクカクした直線的な動きになってしまい、重量のあるロボがノシノシと歩く動きにはならないのです。
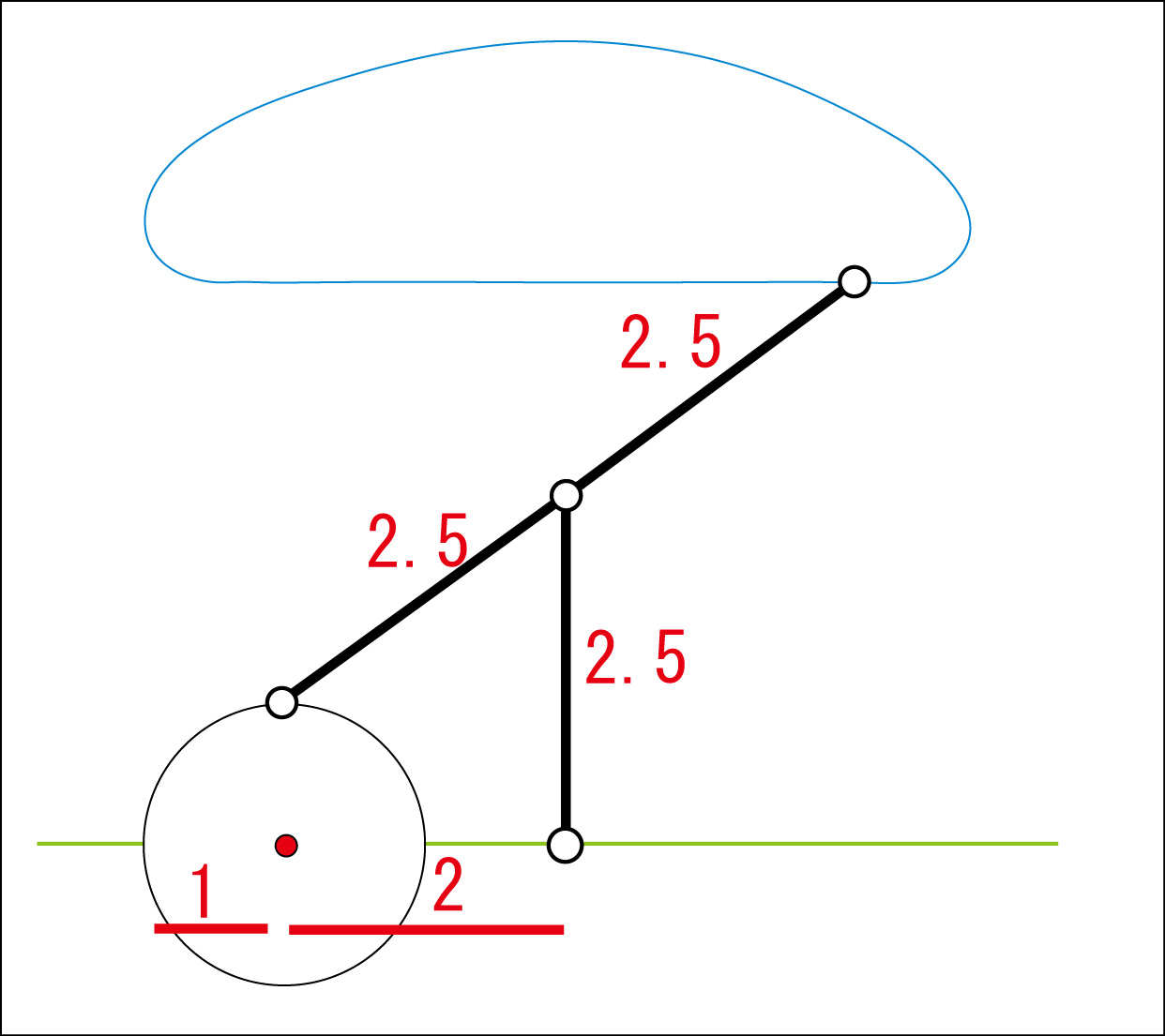
そこで、今回はシェビチェフリンク(別名:ホーキンスリンク)という構造を使います。
このGIFは「Hyrodium laboratory」さん
https://hylab.blogspot.jp/2012/12/tchebicheff-link.html?showComment=1522511135393#c8343250552248649981
でご紹介されていたものを転用させて頂きました。
単純な構造でありながら、平行移動で下がる動作、放物線を描きながら素早く戻る動作など、歩行を再現するには最適なリンクであると思います。
これを使うには、駆動軸カムの回転半径を1として、図の様な比率を取る必要があります。
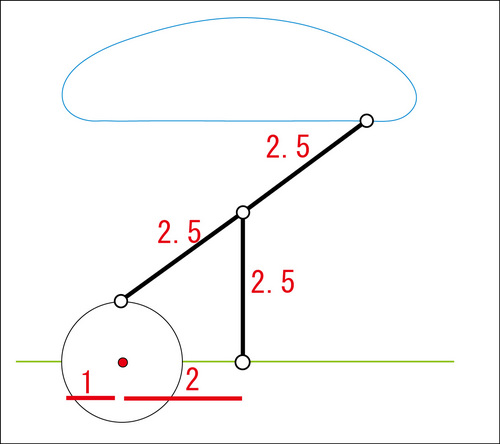
このルールさえ守れば、歩行動作を再現出来るのですから、ありがたいリンク機構ですね。
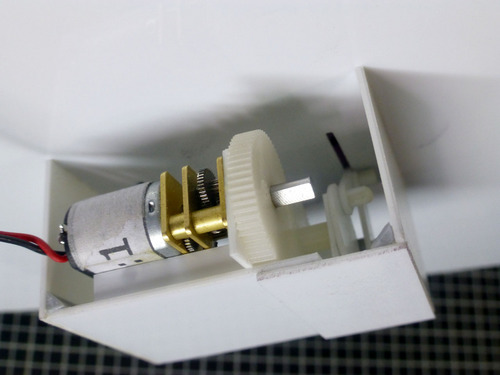
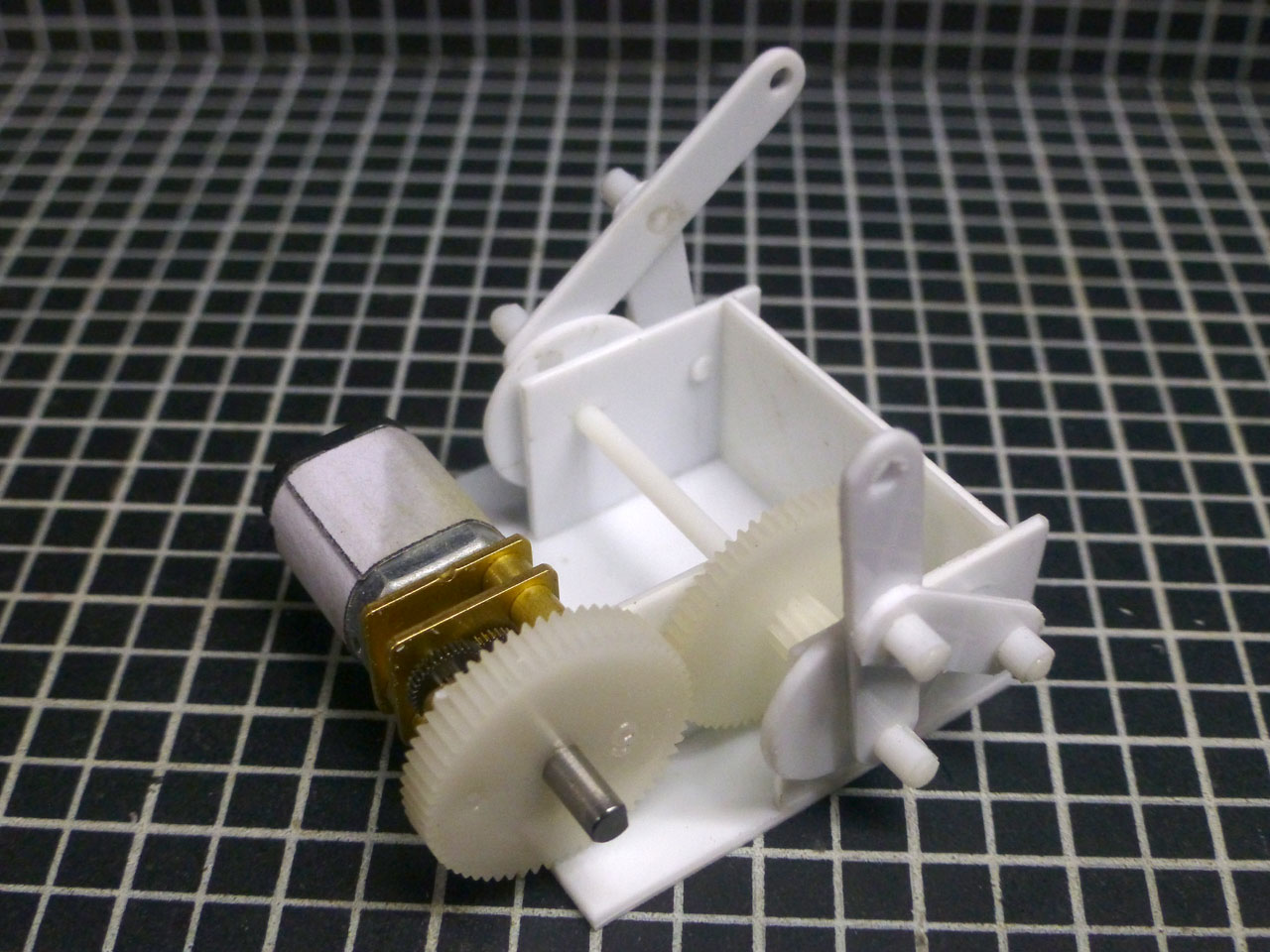
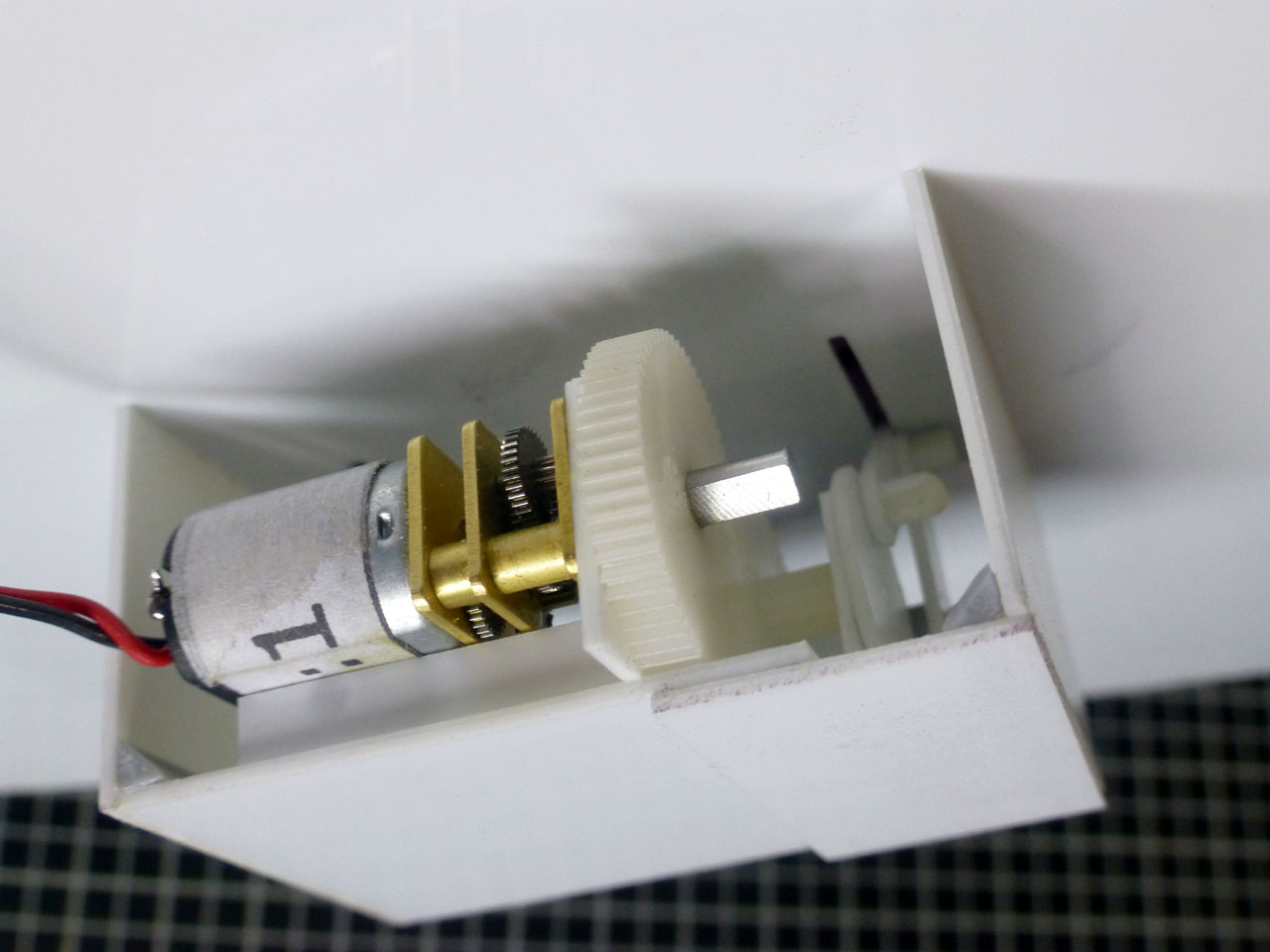
60rpmのギヤードモーターを使い、ギヤとプラ板で自作してみました。

歩幅を2.5cmにするために、各動作軸の長さを逆算して決めています。
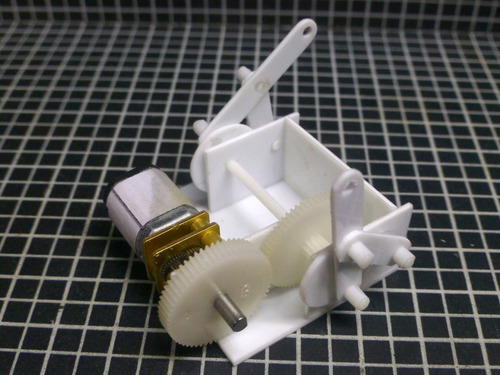
ギヤは、何かをバラした時に取っておいた手持ちから、同じ径のものを2個、加工して使用しました。
軸の外れ止めは、綿棒をカットして、縦に割ったものをエポキシ接着剤で固定しています。
全てプラ材で製作しているので、強度に不安があります。
実は、これは試作品で、上手く行ったら透明なアクリル板で作り直すつもりでしたが、時間的に追い詰められていたので、これをそのまま使ってしまいました(^_^*)
完成品では、マイコンでタイマー動作させ、連続で動かさない様に対策しています。
足は、キットではポリキャップを使った構造になっています。

あまり可動範囲が広いとはいえませんが、歩行動作には充分なクリアランスで、余分なスキマが出来ないぶん、助かってます。
このままでは歩行動作が出来ませんので、全ての関節をユルユルに改造します。
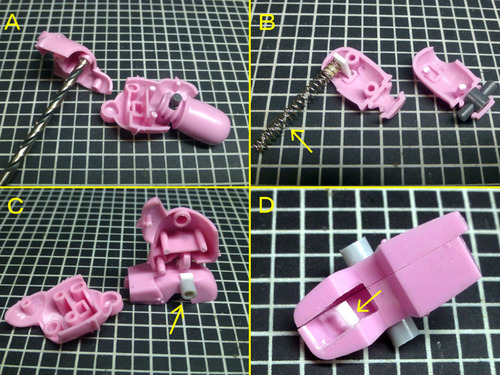
A ヒザはポリキャップですが、ドリルで受けを大きくして、保持力を無くし
ました。
B 付け根もポリキャップでしたが、シャープペンシルから取り出したスプリ
ングに置き換えます。
自由に動く付け根にして、柔軟な動きに対応させます。
C かかとは、ちょうど軸受けのような成型になっていたので、新たにプラパ
イプで軸を作りました。
D 足の裏は、かかとの一部を切り取り、リンクの軸を接続する軸を作りました
中央がへこんでいる構造になっている事も、良い方向に働いてくれました。
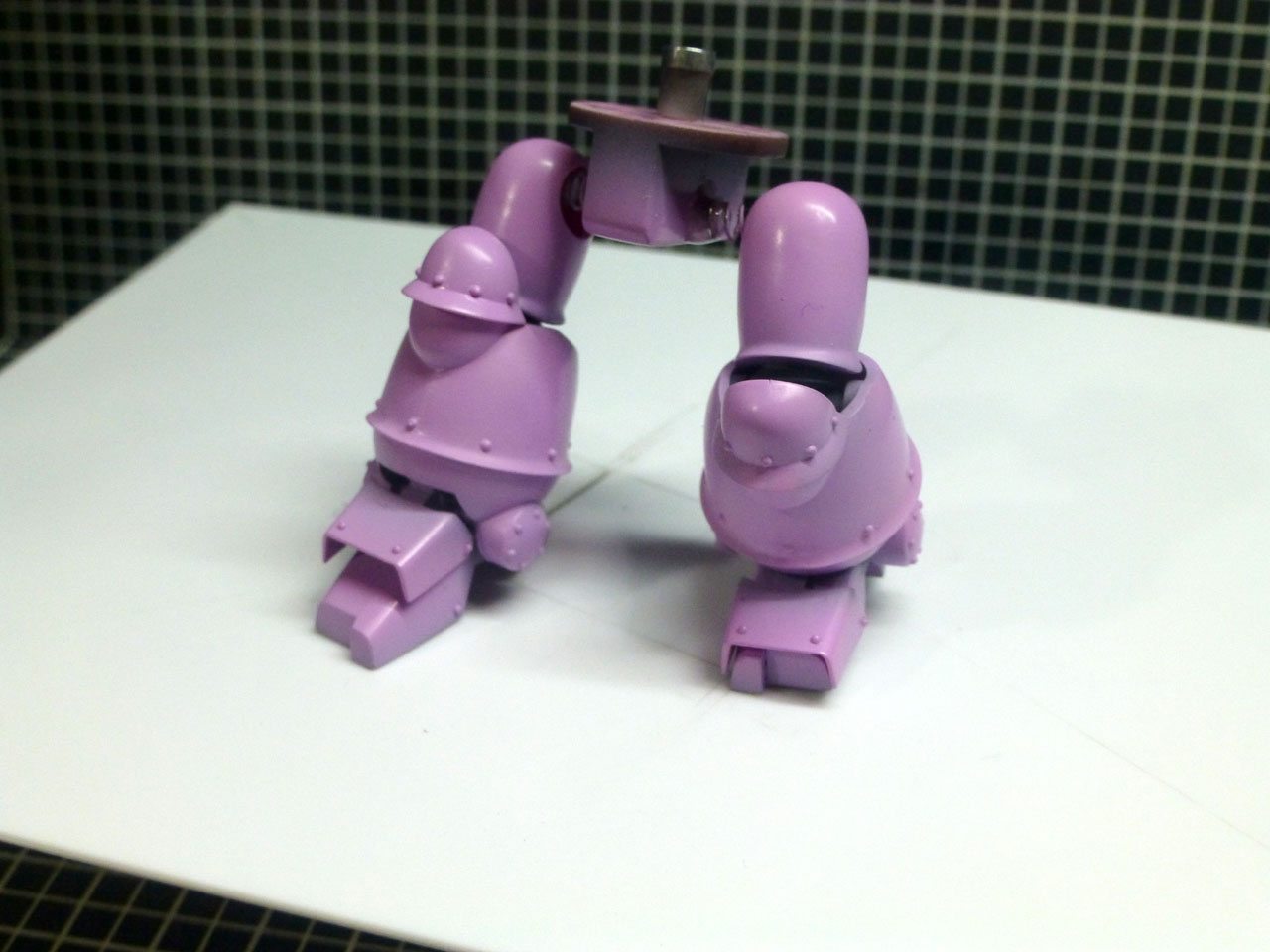
全てを組み立てた様子です。

見た目はキットと変わりない様に見えますが、全く保持力の無いヘロヘロな足になりました。
付け根のスプリングは、スカートの中に隠れて見えなくなってくれるハズです。
この足は、左右貼り合わせなので、接着して合わせ目を消しておきます。
歩行装置には、60rpmのギヤードモーターを使ったのですが、1秒間に一回転では早すぎます。
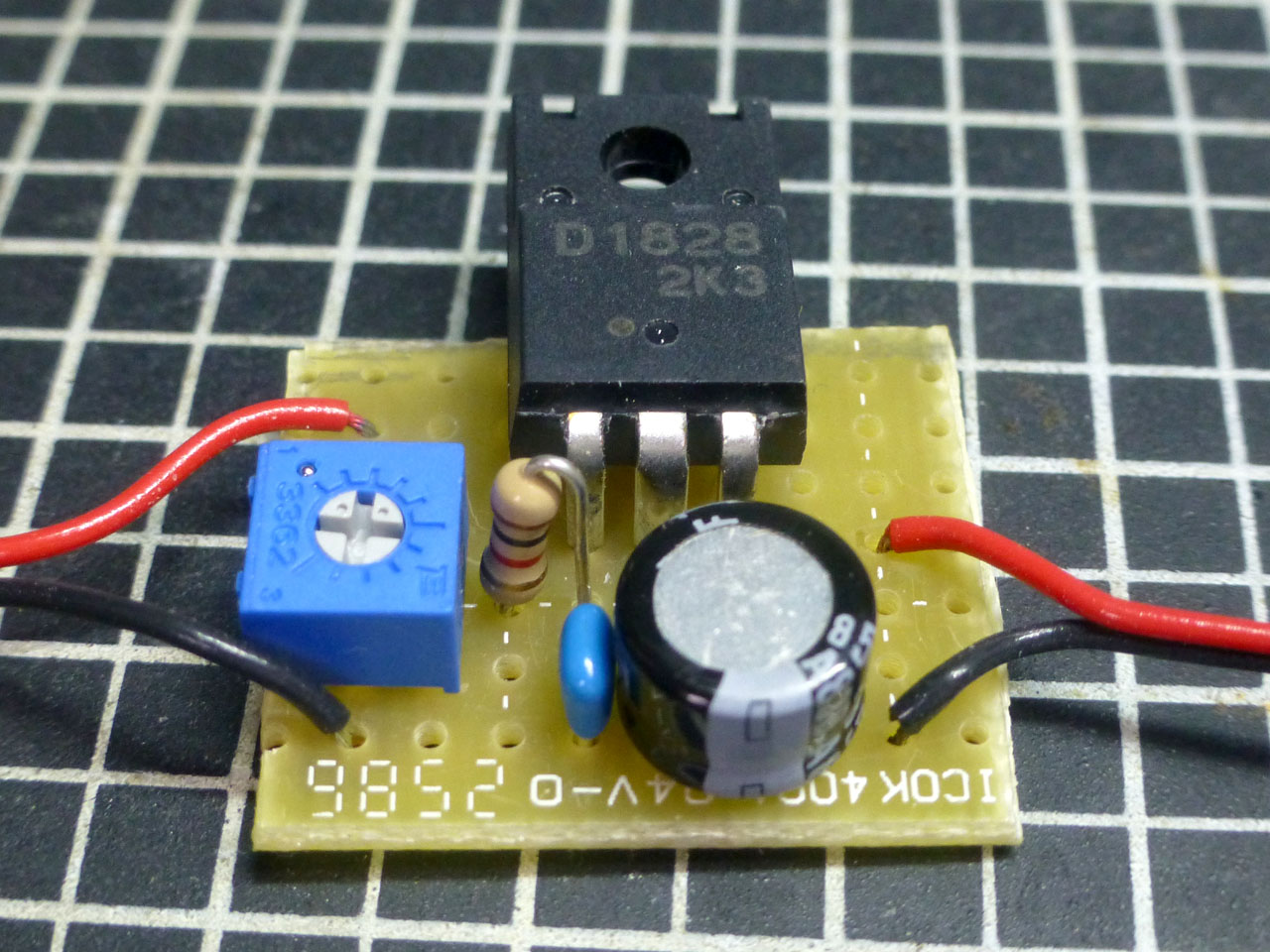
もっと重そうに、ゆっくりと歩行して欲しいので、モーターの回転速度を落とす回路を作りました。
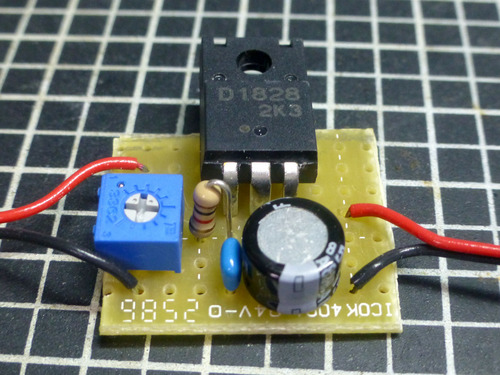
ダーリントントランジスタを使った電圧制御回路です。
ボリュームを回す事で、停止から最大速度まで調節可能です。
今回は5V1Aの電源を繋ぎますが、この程度なら発熱も心配無いので放熱板は付けませんでした。
実際、連続動作させてもほんのり温かくなる程度です。
歩行装置は、ベースの床下に取り付け、リンクの先だけをスリットから露出させました。
実際にあるくわけで無く、ムーンウォーク状態になります。

それでも、ゆっくりした連続動作によって、歩いているように見せる事が出来たと思います。
実際に動作している様子と、動作原理などは、動画で見て頂けば一発だと思いますので、YouTubeに動画を公開しました。
こちらを見て頂ければ、製作の内容も一発で理解して頂けると思います。
是非ご覧下さいね(^^)/
次回は、塗装・組み立ての様子をご紹介したいと思います。
現在、2つのブログランキングへ参加しています。
1日1回、応援のワンクリックをぜひお願いしますm(__)m


ずっと前から歩く動作に興味があって、色々と調べていました。
今回製作した歩行動作の原理は、元々は別の模型に使おうと温めていたアイディアだったのですが、あいにく使う機会に恵まれず、放置されていたものです(^_^*)
光武を製作する、この機会にやっと実現出来ました。
色々と反省点はありますが、とりあえず動いてくれて良かったです。
さて、歩行の動きを再現するには、単純にカムとクランクを組み合わせただけでは上手く表現出来ません。
どうしても、カクカクした直線的な動きになってしまい、重量のあるロボがノシノシと歩く動きにはならないのです。
そこで、今回はシェビチェフリンク(別名:ホーキンスリンク)という構造を使います。
このGIFは「Hyrodium laboratory」さん
https://hylab.blogspot.jp/2012/12/tchebicheff-link.html?showComment=1522511135393#c8343250552248649981
でご紹介されていたものを転用させて頂きました。
単純な構造でありながら、平行移動で下がる動作、放物線を描きながら素早く戻る動作など、歩行を再現するには最適なリンクであると思います。
これを使うには、駆動軸カムの回転半径を1として、図の様な比率を取る必要があります。
このルールさえ守れば、歩行動作を再現出来るのですから、ありがたいリンク機構ですね。
60rpmのギヤードモーターを使い、ギヤとプラ板で自作してみました。

歩幅を2.5cmにするために、各動作軸の長さを逆算して決めています。
ギヤは、何かをバラした時に取っておいた手持ちから、同じ径のものを2個、加工して使用しました。
軸の外れ止めは、綿棒をカットして、縦に割ったものをエポキシ接着剤で固定しています。
全てプラ材で製作しているので、強度に不安があります。
実は、これは試作品で、上手く行ったら透明なアクリル板で作り直すつもりでしたが、時間的に追い詰められていたので、これをそのまま使ってしまいました(^_^*)
完成品では、マイコンでタイマー動作させ、連続で動かさない様に対策しています。
足は、キットではポリキャップを使った構造になっています。

あまり可動範囲が広いとはいえませんが、歩行動作には充分なクリアランスで、余分なスキマが出来ないぶん、助かってます。
このままでは歩行動作が出来ませんので、全ての関節をユルユルに改造します。

A ヒザはポリキャップですが、ドリルで受けを大きくして、保持力を無くし
ました。
B 付け根もポリキャップでしたが、シャープペンシルから取り出したスプリ
ングに置き換えます。
自由に動く付け根にして、柔軟な動きに対応させます。
C かかとは、ちょうど軸受けのような成型になっていたので、新たにプラパ
イプで軸を作りました。
D 足の裏は、かかとの一部を切り取り、リンクの軸を接続する軸を作りました
中央がへこんでいる構造になっている事も、良い方向に働いてくれました。
全てを組み立てた様子です。

見た目はキットと変わりない様に見えますが、全く保持力の無いヘロヘロな足になりました。
付け根のスプリングは、スカートの中に隠れて見えなくなってくれるハズです。
この足は、左右貼り合わせなので、接着して合わせ目を消しておきます。
歩行装置には、60rpmのギヤードモーターを使ったのですが、1秒間に一回転では早すぎます。
もっと重そうに、ゆっくりと歩行して欲しいので、モーターの回転速度を落とす回路を作りました。
ダーリントントランジスタを使った電圧制御回路です。
ボリュームを回す事で、停止から最大速度まで調節可能です。
今回は5V1Aの電源を繋ぎますが、この程度なら発熱も心配無いので放熱板は付けませんでした。
実際、連続動作させてもほんのり温かくなる程度です。
歩行装置は、ベースの床下に取り付け、リンクの先だけをスリットから露出させました。
実際にあるくわけで無く、ムーンウォーク状態になります。
それでも、ゆっくりした連続動作によって、歩いているように見せる事が出来たと思います。
実際に動作している様子と、動作原理などは、動画で見て頂けば一発だと思いますので、YouTubeに動画を公開しました。
※BGMがあります
こちらを見て頂ければ、製作の内容も一発で理解して頂けると思います。
是非ご覧下さいね(^^)/
次回は、塗装・組み立ての様子をご紹介したいと思います。
現在、2つのブログランキングへ参加しています。
1日1回、応援のワンクリックをぜひお願いしますm(__)m
2018-04-24 12:48
コメント(4)

お知らせ~
悪質なリンクを含んだ書き込みが
多発したため、URLを含んだコメント
は書込み出来ない設定にしました。
後了承下さいm(__)m
 「初心者用電飾模型工作入門
電飾しましょっ!」
どろぼうひげ/著 大日本絵画/刊
フルカラー96ページ 定価3,240円
模型を電飾したいけど、難しいのは無理!
何からすれば良いの?という超初心者へ
最短の近道をご案内いたします!
ただ今絶賛発売中です(^^)/
「初心者用電飾模型工作入門
電飾しましょっ!」
どろぼうひげ/著 大日本絵画/刊
フルカラー96ページ 定価3,240円
模型を電飾したいけど、難しいのは無理!
何からすれば良いの?という超初心者へ
最短の近道をご案内いたします!
ただ今絶賛発売中です(^^)/
 「電飾しましょっ!2 PIC編」好評発売中
B5判 88ページ 2500円+税
本書内容に不具合がある箇所についての
正誤表がMODELKASTENにて公開中です
PDFをダウンロードの上、ご活用下さい
正誤表のダウンロードはこちら
「電飾しましょっ!2 PIC編」好評発売中
B5判 88ページ 2500円+税
本書内容に不具合がある箇所についての
正誤表がMODELKASTENにて公開中です
PDFをダウンロードの上、ご活用下さい
正誤表のダウンロードはこちら
 「電飾しましょっ!3 Tips編」
B5判 107ページ 3200円+税
もう光るだけでは物足りない電飾モデラ
ーの皆さんへチョイテクを多数ご紹介!
PICでのモーター制御や調光まで網羅し
た、幅広く電飾を楽しめる一冊です(^^)/
「電飾しましょっ!3 Tips編」
B5判 107ページ 3200円+税
もう光るだけでは物足りない電飾モデラ
ーの皆さんへチョイテクを多数ご紹介!
PICでのモーター制御や調光まで網羅し
た、幅広く電飾を楽しめる一冊です(^^)/
 doro_hige という名前でさえずってます。
フォローよろしくです(^^♪
Follow @doro_hige
doro_hige という名前でさえずってます。
フォローよろしくです(^^♪
Follow @doro_hige
 DORO☆OFFの公式ブログです
展示会のサポートもこちらですよ
DORO☆OFFの公式ブログです
展示会のサポートもこちらですよ
多発したため、URLを含んだコメント
は書込み出来ない設定にしました。
後了承下さいm(__)m
| 「電飾しましょっ!」絶賛発売中! |
「初心者用電飾模型工作入門
電飾しましょっ!」
どろぼうひげ/著 大日本絵画/刊
フルカラー96ページ 定価3,240円
模型を電飾したいけど、難しいのは無理!
何からすれば良いの?という超初心者へ
最短の近道をご案内いたします!
ただ今絶賛発売中です(^^)/
| 「電飾しましょっ!2 PIC編」発売中! |
「電飾しましょっ!2 PIC編」好評発売中
B5判 88ページ 2500円+税
本書内容に不具合がある箇所についての
正誤表がMODELKASTENにて公開中です
PDFをダウンロードの上、ご活用下さい
正誤表のダウンロードはこちら
| 「電飾しましょっ!3 Tips編」発売中! |
「電飾しましょっ!3 Tips編」
B5判 107ページ 3200円+税
もう光るだけでは物足りない電飾モデラ
ーの皆さんへチョイテクを多数ご紹介!
PICでのモーター制御や調光まで網羅し
た、幅広く電飾を楽しめる一冊です(^^)/
| ツイッターやってます |
doro_hige という名前でさえずってます。
フォローよろしくです(^^♪
Follow @doro_hige
| DORO☆OFF公式ブログ |
DORO☆OFFの公式ブログです
展示会のサポートもこちらですよ
模型誌 掲載作品
各模型誌に掲載された作品です
 ModelGraphics No.292 2009.3 に掲載されました。
詳細はカテゴリー「スター・デストロイヤー 製作記」をご覧下さい。
ModelGraphics No.292 2009.3 に掲載されました。
詳細はカテゴリー「スター・デストロイヤー 製作記」をご覧下さい。
 2009.4 キャラクターエイジ VOL.02 に掲載されました。
詳細はカテゴリー「CA掲載ジオラマ制作記」をご覧下さい。
2009.4 キャラクターエイジ VOL.02 に掲載されました。
詳細はカテゴリー「CA掲載ジオラマ制作記」をご覧下さい。
 2009.9 キャラクターエイジ VOL.03 に掲載されました。
詳細はカテゴリー「CA3 エコー基地 製作記」をご覧下さい。
2009.9 キャラクターエイジ VOL.03 に掲載されました。
詳細はカテゴリー「CA3 エコー基地 製作記」をご覧下さい。
 2009.12 ModelGraphix No.302 に掲載されました。
詳細はカテゴリー「FM SnowSpeeder 製作記」をご覧下さい。
2009.12 ModelGraphix No.302 に掲載されました。
詳細はカテゴリー「FM SnowSpeeder 製作記」をご覧下さい。
 2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「CA4 HomeOne 製作記」をご覧下さい。
2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「CA4 HomeOne 製作記」をご覧下さい。
 2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「A-Wing Fighter製作記」をご覧下さい。
2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「A-Wing Fighter製作記」をご覧下さい。
 2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
 2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
 2011.05キャラクターエイジVol.06に掲載
詳細はCA6 1/48 TIE FIGHTER 製作記
をご覧下さい。
ランダム閃光発生回路の説明動画へ
2011.05キャラクターエイジVol.06に掲載
詳細はCA6 1/48 TIE FIGHTER 製作記
をご覧下さい。
ランダム閃光発生回路の説明動画へ
 2012.03 ModelGraphix 2012.04
に掲載させて頂きました。
詳細はNaboo StarFighter 製作記
をご覧下さい。
2012.03 ModelGraphix 2012.04
に掲載させて頂きました。
詳細はNaboo StarFighter 製作記
をご覧下さい。
 2012.11 Scale World Vol.2 に掲載
させて頂きました。
DVD付きで動画も楽しめます(^^)/
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
2012.11 Scale World Vol.2 に掲載
させて頂きました。
DVD付きで動画も楽しめます(^^)/
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
 2013.10 HobbyJapan 2013.11 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
2013.10 HobbyJapan 2013.11 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
 2013.10 ModelGraphix 2013.11に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
詳しい製作記はこちら
2013.10 ModelGraphix 2013.11に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
詳しい製作記はこちら
 2013.11 ModelGraphix 2013.12 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
2013.11 ModelGraphix 2013.12 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
") 2013.12 ModelGraphix 2014.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
製作記はこちら(Build Article Here)
2013.12 ModelGraphix 2014.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
製作記はこちら(Build Article Here)
 2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像と動画が表示されます
2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像と動画が表示されます
 2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
") 2014.04 ModelGraphix 2014.05 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
2014.04 ModelGraphix 2014.05 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 2014.05 ModelGraphix 2014.06 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
2014.05 ModelGraphix 2014.06 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 2014.06 HobbyJapan 2014.07 に
掲載させて頂きました。
バルグレイの完成画像はこちら
デバッケの完成画像はこちら
2014.06 HobbyJapan 2014.07 に
掲載させて頂きました。
バルグレイの完成画像はこちら
デバッケの完成画像はこちら
 2014.08 HobbyJapan 2014.08に
掲載させて頂きました。
シャングリ・ラーの完成画像と動画はこちら
デラメア級の完成画像はこちら
2014.08 HobbyJapan 2014.08に
掲載させて頂きました。
シャングリ・ラーの完成画像と動画はこちら
デラメア級の完成画像はこちら
 ModelGraphix 2014.09 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
ModelGraphix 2014.09 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
 ModelGraphix 2014.11 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix 2014.11 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 HobbyJapan 2015.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
HobbyJapan 2015.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2015.02 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌 2015.02 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 HobbyJapan誌 2015.02 に掲載、更に
作例集”星巡る方舟”編に掲載頂きました
ギミック満載の動画を公開しています
HobbyJapan誌 2015.02 に掲載、更に
作例集”星巡る方舟”編に掲載頂きました
ギミック満載の動画を公開しています

 HobbyJapan誌 2015.03 に掲載。更に
作例集”星巡る方舟”編に掲載頂きました
上の画像クリックで完成画像が表示されます
HobbyJapan誌 2015.03 に掲載。更に
作例集”星巡る方舟”編に掲載頂きました
上の画像クリックで完成画像が表示されます
 ModelGraphix誌2015.05 No.366 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌2015.05 No.366 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2015.08 No.369 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌 2015.08 No.369 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌2015.06 No.367 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌2015.06 No.367 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2015.09 No.370 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌 2015.09 No.370 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 HobbyJapan誌 2015.11 No.557 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
HobbyJapan誌 2015.11 No.557 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2016.01 No.374 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌 2016.01 No.374 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2016.02 No.375 に
掲載させて頂きました。
上の画像クリックで完成画像がが表示されます
ModelGraphix誌 2016.02 No.375 に
掲載させて頂きました。
上の画像クリックで完成画像がが表示されます
 ModelGraphix誌 2016.03 No.376に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
ModelGraphix誌 2016.03 No.376に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
 HobbyJapan誌 2016.03 No.561に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
HobbyJapan誌 2016.03 No.561に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
 ModelArt別冊、艦船模型スペシャル誌
2016 SPRING No.59 に
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
ModelArt別冊、艦船模型スペシャル誌
2016 SPRING No.59 に
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJAPAN誌 2016.04 No.561へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJAPAN誌 2016.04 No.561へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.06 No.564へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.06 No.564へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 ModelGraphix誌 2016.07 No.380 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
ModelGraphix誌 2016.07 No.380 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.07 No.565 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.07 No.565 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.09 No.567 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.09 No.567 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.10 No.568 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.10 No.568 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.11 No.569 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.11 No.569 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.12 No570 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.12 No570 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.02 No.572 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2017.02 No.572 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 ModelGraphix誌 2017.02 No.387 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
ModelGraphix誌 2017.02 No.387 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 ModelGraphix誌 2017.04 No.389 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
ModelGraphix誌 2017.04 No.389 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
完成画像はありません。
上の画像クリックで製作記
が表示されます
HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
完成画像はありません。
上の画像クリックで製作記
が表示されます
| Lot No.S-001 スターデストロイヤー |
ModelGraphics No.292 2009.3 に掲載されました。
詳細はカテゴリー「スター・デストロイヤー 製作記」をご覧下さい。
| Lot No.S-002 ホス&DSトレンチバトル |
2009.4 キャラクターエイジ VOL.02 に掲載されました。
詳細はカテゴリー「CA掲載ジオラマ制作記」をご覧下さい。
| Lot No.S-003 REBEL BASE |
2009.9 キャラクターエイジ VOL.03 に掲載されました。
詳細はカテゴリー「CA3 エコー基地 製作記」をご覧下さい。
| Lot No.S-004 FM SnowSpeeder |
2009.12 ModelGraphix No.302 に掲載されました。
詳細はカテゴリー「FM SnowSpeeder 製作記」をご覧下さい。
| Lot No.S-005 HomeOne |
2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「CA4 HomeOne 製作記」をご覧下さい。
| Lot No.S-006 A-Wing StarFighter |
2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「A-Wing Fighter製作記」をご覧下さい。
| Lot No.S-007 CA5 VC4 シャトル |
2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
| Lot No.S-008 CA5 VC4 スレーブ1 |
2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
| Lot No.S-009 CA6 TIE FIGHTER |
2011.05キャラクターエイジVol.06に掲載
詳細はCA6 1/48 TIE FIGHTER 製作記
をご覧下さい。
ランダム閃光発生回路の説明動画へ
| Lot No.S-010 Naboo StarFighter |
2012.03 ModelGraphix 2012.04
に掲載させて頂きました。
詳細はNaboo StarFighter 製作記
をご覧下さい。
| Lot No.S-011 フジミ SPINNER |
2012.11 Scale World Vol.2 に掲載
させて頂きました。
DVD付きで動画も楽しめます(^^)/
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
| Lot No.S-012 ゲルバデス級 ダロルド |
2013.10 HobbyJapan 2013.11 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
| Lot No.S-013 Viper Mk.Ⅱ |
2013.10 ModelGraphix 2013.11に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
詳しい製作記はこちら| Lot No.S-014 次元潜航艦 UX-01 |
2013.11 ModelGraphix 2013.12 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
| Lot No.S-015 BS GALACTICA |
2013.12 ModelGraphix 2014.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
製作記はこちら(Build Article Here) | Lot No.S-016 ヤマト2199 |
2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像と動画が表示されます
| Lot No.S-017 シュデルグ |
2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-018 BS PEGASUS |
2014.04 ModelGraphix 2014.05 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-019 ギガント |
2014.05 ModelGraphix 2014.06 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-020 バルグレイ |
2014.06 HobbyJapan 2014.07 に
掲載させて頂きました。
バルグレイの完成画像はこちら
デバッケの完成画像はこちら
| Lot No.S-021 シャングリ・ラー |
2014.08 HobbyJapan 2014.08に
掲載させて頂きました。
シャングリ・ラーの完成画像と動画はこちら
デラメア級の完成画像はこちら
| Lot No.S-022 AU-O9 アナライザー |
ModelGraphix 2014.09 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
| Lot No.S-023 ドメラーズⅢvsヤマト |
ModelGraphix 2014.11 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-024 N-ノーチラス号 |
HobbyJapan 2015.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-025 X-WING RED 3 |
ModelGraphix誌 2015.02 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-026 1/500 ヤマト2199 |
 HobbyJapan誌 2015.02 に掲載、更に
作例集”星巡る方舟”編に掲載頂きました
ギミック満載の動画を公開しています
HobbyJapan誌 2015.02 に掲載、更に
作例集”星巡る方舟”編に掲載頂きました
ギミック満載の動画を公開しています
| Lot No.S-027 ミランガル |
HobbyJapan誌 2015.03 に掲載。更に
作例集”星巡る方舟”編に掲載頂きました
上の画像クリックで完成画像が表示されます
| Lot No.S-028 AT-ST |
ModelGraphix誌2015.05 No.366 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-029 バラクーダ号 |
ModelGraphix誌 2015.08 No.369 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-030 1/48 X-WING |
ModelGraphix誌2015.06 No.367 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-031 Y-WING GOLD2 |
ModelGraphix誌 2015.09 No.370 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-032 マクロス要塞艦 |
HobbyJapan誌 2015.11 No.557 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-033 EP.Ⅶ ファルコン |
ModelGraphix誌 2016.01 No.374 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-034 グフカスタム |
ModelGraphix誌 2016.02 No.375 に
掲載させて頂きました。
上の画像クリックで完成画像がが表示されます
| Lot No.S-035 ハンタキラータンク |
ModelGraphix誌 2016.03 No.376に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
| Lot No.S-036 メカコレ ヤマト・ランベア |
HobbyJapan誌 2016.03 No.561に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
| Lot No.S-037 護衛艦あきづき |
ModelArt別冊、艦船模型スペシャル誌
2016 SPRING No.59 に
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-038 アスタコNEO |
HobbyJAPAN誌 2016.04 No.561へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-039 VM スタデ&X-WING |
HobbyJapan誌 2016.06 No.564へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-040 バンダイ A-WING |
ModelGraphix誌 2016.07 No.380 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-041 サンダーバード 2・4 号 |
HobbyJapan誌 2016.07 No.565 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-042 はしご付き消防車 |
HobbyJapan誌 2016.09 No.567 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-043 VM Poe'sX & FO TIE |
HobbyJapan誌 2016.10 No.568 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-044 マクロスエリシオン |
HobbyJapan誌 2016.11 No.569 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-045 VM Y-WING |
HobbyJapan誌 2016.12 No570 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-046 VM ファルコン |
HobbyJapan誌 2017.02 No.572 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-047 R.o. X-WING RED1 |
ModelGraphix誌 2017.02 No.387 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-048 VM タイセット |
HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-049 U-WING & タイセット |
HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-050 FMタイガーモス |
ModelGraphix誌 2017.04 No.389 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-051 アンドロメダ2202 |
HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-052 レイズナーヘッド |
HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
完成画像はありません。
上の画像クリックで製作記
が表示されます
製作記 STAR WARS 作品
| Lot No.001 ミレニアム・ファルコン |

| Lot No.003 SLAVE 1 |

| Lot No.004 X-WING |

| Lot No.007 シャトル・タイデリアム |
 2007-06-06 完成しました。
完成画像はこちら
カテゴリー「シャトル・タイデリアム製作記」
2007-06-06 完成しました。
完成画像はこちら
カテゴリー「シャトル・タイデリアム製作記」
| Lot No.011 Y-Wing |
 2007-08-21 完成しました。
完成画像はこちら
カテゴリー「Y-Wing製作記」
2007-08-21 完成しました。
完成画像はこちら
カテゴリー「Y-Wing製作記」
| Lot No.012 スター・デストロイヤー |
 2008-05-19 完成しました。
「模型誌掲載作品」へ移動しました。
2008-05-19 完成しました。
「模型誌掲載作品」へ移動しました。
| Lot No.014 JEDI STAR FIGHTER |
 2008-06-28 完成しました。
完成画像はこちら
カテゴリー「JEDI STAR FIGHTER 製作記」
2008-06-28 完成しました。
完成画像はこちら
カテゴリー「JEDI STAR FIGHTER 製作記」
| Lot No.016 mpc AT-AT |
 2008-09-06 完成しました。
完成画像はこちら
カテゴリー「mpc AT-AT 製作記」
2008-09-06 完成しました。
完成画像はこちら
カテゴリー「mpc AT-AT 製作記」
| Lot No.017 TIE INTERCEPTOR |
 2008-10-10 完成しました。
完成画像はこちら
2008-10-10 完成しました。
完成画像はこちら
| Lot No.018 Deth Star Surface |
 2008-10-27 完成しました。
完成画像はこちら
2008-10-27 完成しました。
完成画像はこちら
| Lot No.019 A-Wing Fighter |
 2008.12.16 完成しました。。
完成画像はこちら
カテゴリー「A-Wing Fighter 製作記」
2008.12.16 完成しました。。
完成画像はこちら
カテゴリー「A-Wing Fighter 製作記」
| Lot No.022 1/48 X-Wing Fighter |
 2009-05-15 完成しました。
完成画像はこちら
2009-05-15 完成しました。
完成画像はこちら| Lot No.027 FM 1/144 Falcon |
 2010.08.20 完成しました。
完成画像はこちら
カテゴリー「FM 144ファルコン 製作記」
2010.08.20 完成しました。
完成画像はこちら
カテゴリー「FM 144ファルコン 製作記」
| Lot No.031 VC4 スターデストロイヤー |
 完成画像はこちら
カテゴリー「VC4 スター・デストロイヤー 製作記」
完成画像はこちら
カテゴリー「VC4 スター・デストロイヤー 製作記」
| Lot No.021 Death Star Ⅱ |
 デススターⅡをフルスクラッチしました。
完成画像はこちら
製作過程を交えた完成ムービーはこちら
カテゴリー「Death Star Ⅱ 製作記」
デススターⅡをフルスクラッチしました。
完成画像はこちら
製作過程を交えた完成ムービーはこちら
カテゴリー「Death Star Ⅱ 製作記」
製作記 スタジオジブリ 作品







製作記 キャラクターもの
| Lot No.002 頭文字Dトレノ |

| Lot No.008 ザク Ver2.0 |
 2007-06-22 完成しました。
完成画像はこちら
カテゴリー「ザクVer2.0製作記」では、制作過程を紹介しています。
2007-06-22 完成しました。
完成画像はこちら
カテゴリー「ザクVer2.0製作記」では、制作過程を紹介しています。
| Lot No.015 AVP2エイリアン リペイント |
 2008-07-05 完成しました。
完成画像はこちら
カテゴリー「ALIEN リペイント」では、制作過程を紹介しています。
2008-07-05 完成しました。
完成画像はこちら
カテゴリー「ALIEN リペイント」では、制作過程を紹介しています。
| Lot No.023 アオシマ T-800 |
 2009-09-07 完成しました。
完成画像はこちら
首の電動化の動画はこちら
2009-09-07 完成しました。
完成画像はこちら
首の電動化の動画はこちら
| Lot No.024 MGアイマス機 双海真美 |
 2009-12-20 完成しました。
完成画像はこちら
2009-12-20 完成しました。
完成画像はこちら
| Lot No.026 Ma.K ポーラーベアー |
 2010-05-04 完成しました。
完成画像はこちら
2010-05-04 完成しました。
完成画像はこちら
| Lot No.028 ロボコップ ED-209 |
 2010-10-02 完成しました。
完成画像はこちら
2010-10-02 完成しました。
完成画像はこちら
| Lot No.034 Ma.k.クレーテ |
 完成画像はこちら
完成画像はこちら
| Lot No.035 LBX パンドラ |
 完成画像はこちら
完成画像はこちら
| Lot No.037 フジミ SPINNER |
 2012-08-30 完成しました。
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
2012-08-30 完成しました。
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
| Lot No.038 ごあいさつダンボー |
 上の画像クリックで製作記と動画へGo
上の画像クリックで製作記と動画へGo
| Lot No.041 LastExile ヴァンシップ |
 2013-03-03 完成しました。
画像クリックで完成画像と動画へGo
2013-03-03 完成しました。
画像クリックで完成画像と動画へGo
| Lot No.043 デコトラ「天下御免」 |
 2013.1頃に完成しています
画像クリックで完成画像と動画へGo
2013.1頃に完成しています
画像クリックで完成画像と動画へGo
製作記 宇宙船など
| Lot No.005 コスモゼロ |
 2007-03-03 完成しました。
完成画像はこちら
2007-03-03 完成しました。
完成画像はこちら
| Lot No.006 ブラックタイガー |
 2007-03-12 完成しました♪
完成画像はこちら
2007-03-12 完成しました♪
完成画像はこちら
| Lot No.009 BIRD OF PREY |
 2007-07-08 完成しました♪
完成画像はこちら
2007-07-08 完成しました♪
完成画像はこちら
| Lot No.045 メカコレヤマト2199 |
 2014-05-31 完成しました♪
完成画像と発射の動画はこちら
2014-05-31 完成しました♪
完成画像と発射の動画はこちら
| Lot No.010 ノストロモ号 |
 2005-12-18 完成しました♪
完成画像はこちら
2005-12-18 完成しました♪
完成画像はこちら
| Lot No.013 たまごスペースシャトル |
 2008-06-05 完成しました♪
完成画像はこちら
2008-06-05 完成しました♪
完成画像はこちら
| Lot No.025 DVD特典 宇宙戦艦ヤマト |
 2010-04-05 完成しました。
完成画像はこちら
2010-04-05 完成しました。
完成画像はこちら
| Lot No.033 Space Clipper |
 2012-02-13 完成しました。
完成画像はこちら
2012-02-13 完成しました。
完成画像はこちら
| Lot No.039 アルカディア号 |
 1012-11-20完成しました。
完成画像はこちら
1012-11-20完成しました。
完成画像はこちら| Lot No.048 シルフィード |
 16BitModels用として製作しました
2017.09完成しました。
16BitModels用として製作しました
2017.09完成しました。

うわっ歩いてる((((;゜Д゜))))
これを更に改良?して弧を描くように歩けたら、と。
昔、ロボコンの歩くプラモデルってのがありましてゼンマイ駆動でガッシャンガッシャンと歩く?つーか
まぁすぐに転けまくりましたね!腕がスプリングになっていてそれでバランスを取ってました。
by 澪 (2018-04-28 17:31)
澪 さん、こんばんは(^^♪
そうですね。
これを元に、どんどん応用してみて下さい(^^)
ロボコンの歩くプラモ、作りましたよー
また再販されないかな
徹底的に改造して作り倒したいです(^_^*)
by どろぼうひげ (2018-04-28 21:19)
とても参考になりました!
いろんなことやってみたくなりますね。
不思議なことに?逆に取り付けると
逆さまに歩いているように見えるのは
やってみないとわからない意外な動きでした!
動作部分のジョイントの簡単なアイデアが
あればもっとみんな簡単につくれるかも?
ですね。ありがとうございました!
by tezno (2018-04-30 19:39)
teznoさん、こんばんは(^^♪
参考になってくれて嬉しいです!
誰かが実際に試してみて欲しくてブログを書いているので、本当に実践してくれたことに感謝です(^^)/
ここから先、もっと上手く使ってくれる方が現れることに期待しています
こちらこそ、ありがとうございました!
by どろぼうひげ (2018-05-03 00:20)