飛行形態 [デロリアン製作記]
久し振りの更新です^^
以前は頻繁に製作記をブログで公開していたのですが、ツイッターの方が手軽で多くの方に見て頂ける感じでしたので、ブログから遠ざかっていました。
でも、鋼鉄ジーグの掲載告知をしてからアクセス状況を見てみたら、こんなロクに更新もしないブログを、毎日1000人くらいの方が見てくれていました。
これは何か応えないといけないと思い、製作記を再開してみようと思います。
と、いう訳で、デロリアンの製作記をスタートしてみます。
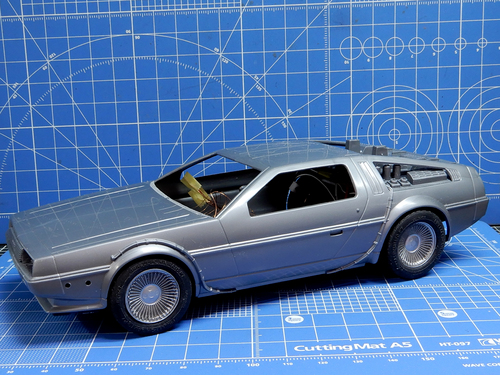
アオシマさんの1/24デロリアン、パートⅠタイプです。
この他、パートⅡ、パートⅢのタイプや、プルバック走行するミニタイプも発売されています。
エッチング付きのキットも発売されていますが、あいにく持っていませんので、こちらで製作したいと思います。
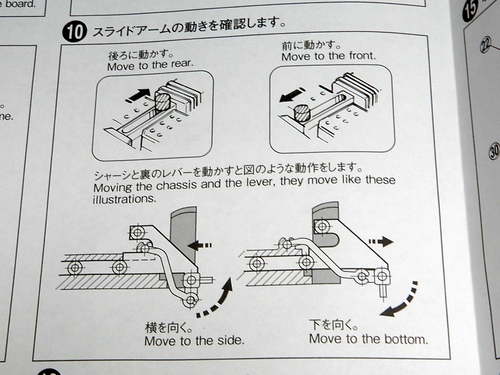
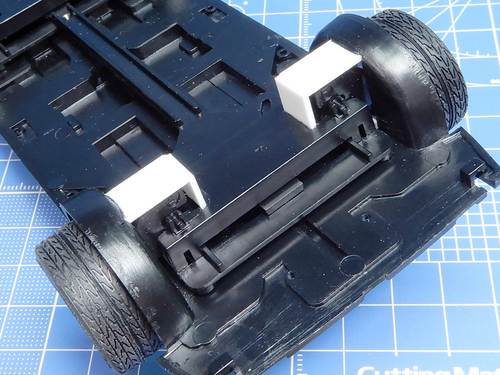
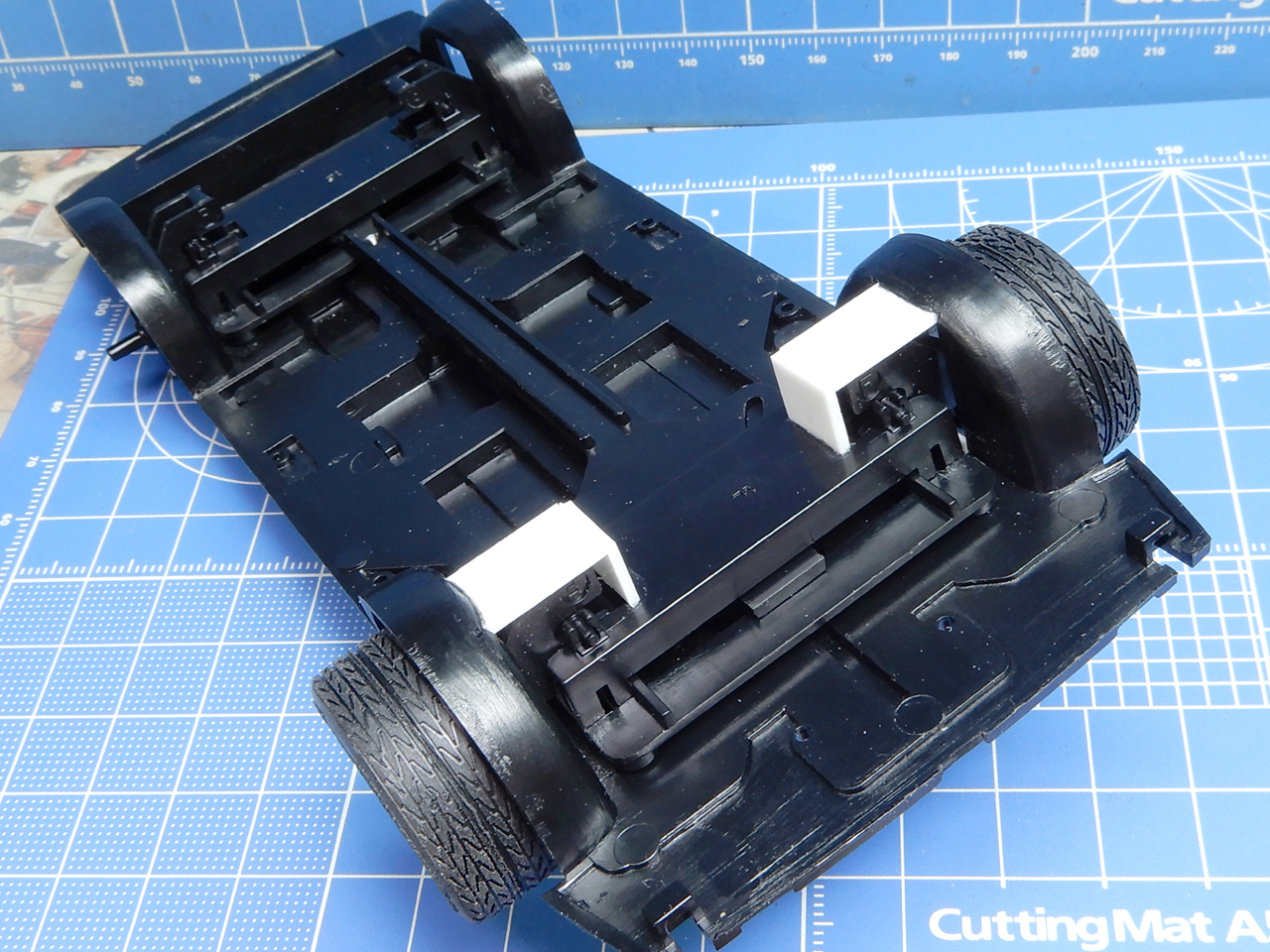
キットは、劇中と同様にタイヤが下を向いて、飛行形態になるギミックが付いています。
差し替えではなく、車体下のレバーをスライドさせて動かす構造になっていますが、これがよく考えられた仕組みで、感心しました。
本当は下を向いたタイヤは、シャーシーと水平になるはずですが、こちらはタイヤの面がシャーシーより下になってしまいます。
そんな不満な面も少々ありますが、このギミックは素晴らしいですね。
でも、どうも動きがスムーズにいかない場合があり、色々と調べてみたら、幾つかのポイントがありました。
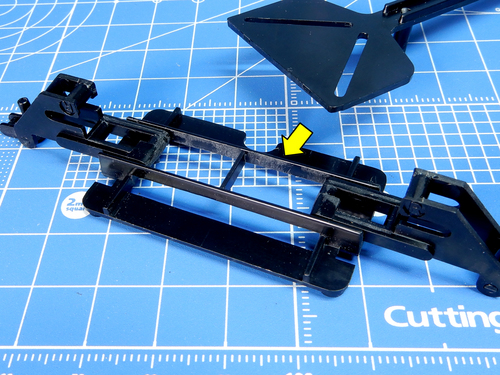
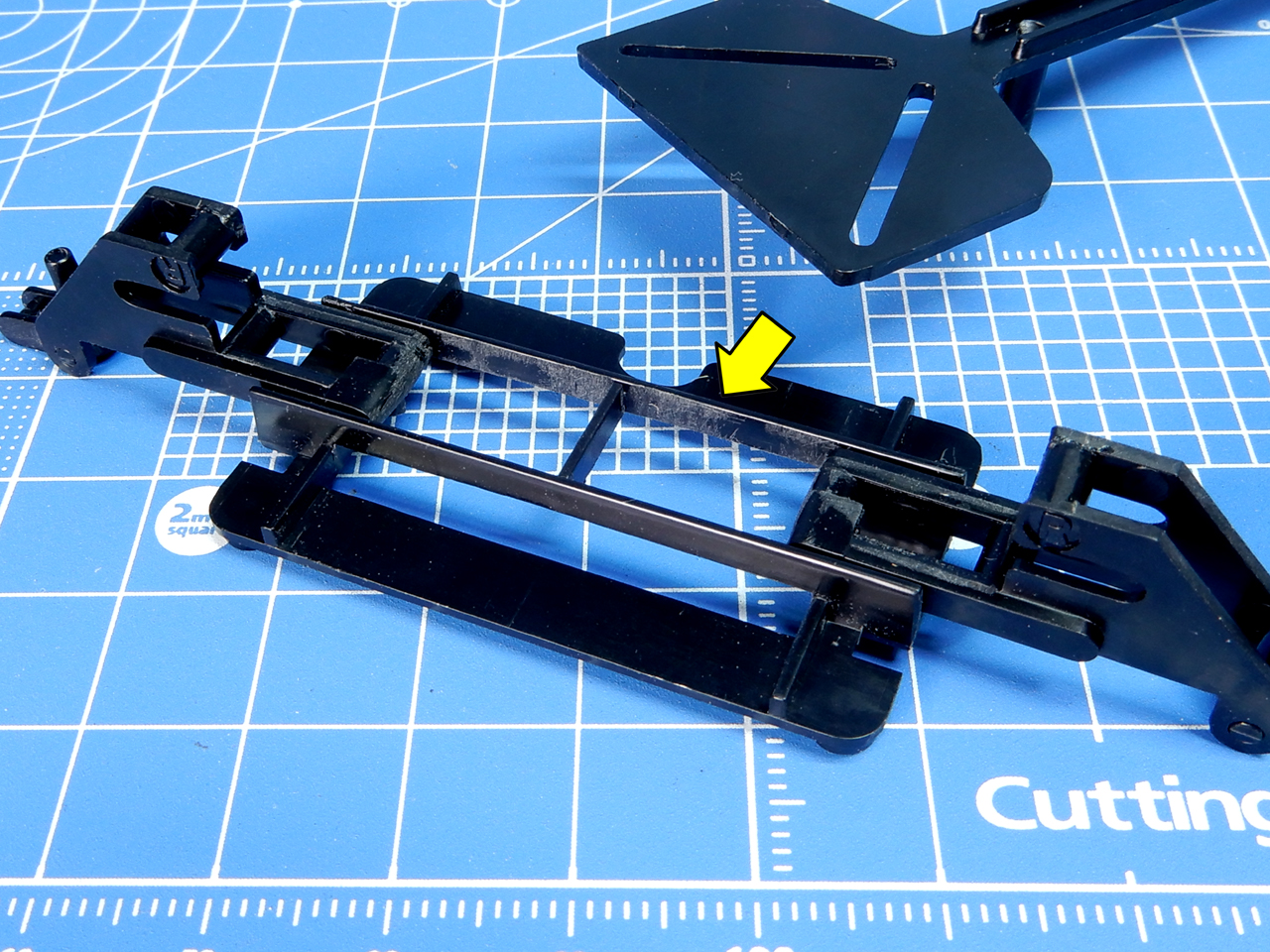
まず、成型時の段差が出来てしまっている部分は、ちゃんと処理しなくてはなりません。
発売されてだいぶ経つキットですので、パーティングラインが強めに出ている様です。
変に当ってしまう部分が無い様に、しっかりと面出ししてあげましょう。
可動パーツには前後があります。

タイヤを下に向かせるロッドは、前後で違っています。
僅かな差なので、見落としてしまう場合があるかもしれませんが、これを間違えると上手く動作しません。
パーツにはすべて「F」と「R」が刻印されていて、前輪用と後輪用に分かれていますので、間違え無い様に組み立てましょう。
キットにはグリスも付いていて、これらの事に気を付けて組み立てれば、とてもスムーズにギミックうを楽しむ事ができます。
しかし、通常の走行状態にしてみると、タイヤがヘロヘロです。
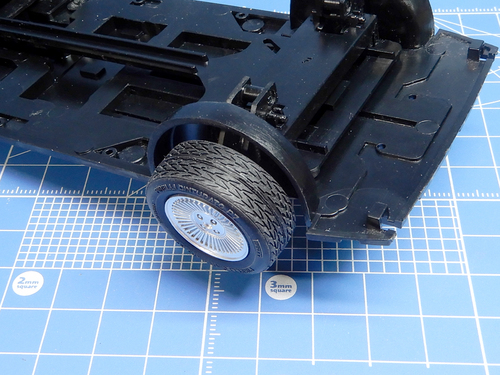
重さでタイヤが傾き、常にグラグラしていて頼りない足回りになります。
これではギミックを無くして、固定してしまった方がマシですね。
とはいえ、折角のギミックを無くしてしまうのは大変惜しいので、何とかしてみようと思います。

まず、タイヤが傾いてしまう問題ですが、ロッドがクリアランス確保のために、フラフラと動いてしまうからだと思います。
タイヤボックスの内側にプラ板を追加して、ロッドを支えてブレを抑えました。
ちなみに、最初はホイールを裏から抑えるプラ板を追加してみたのですが、飛行状態にした時に干渉してしまうため、こんな方法を取っています。
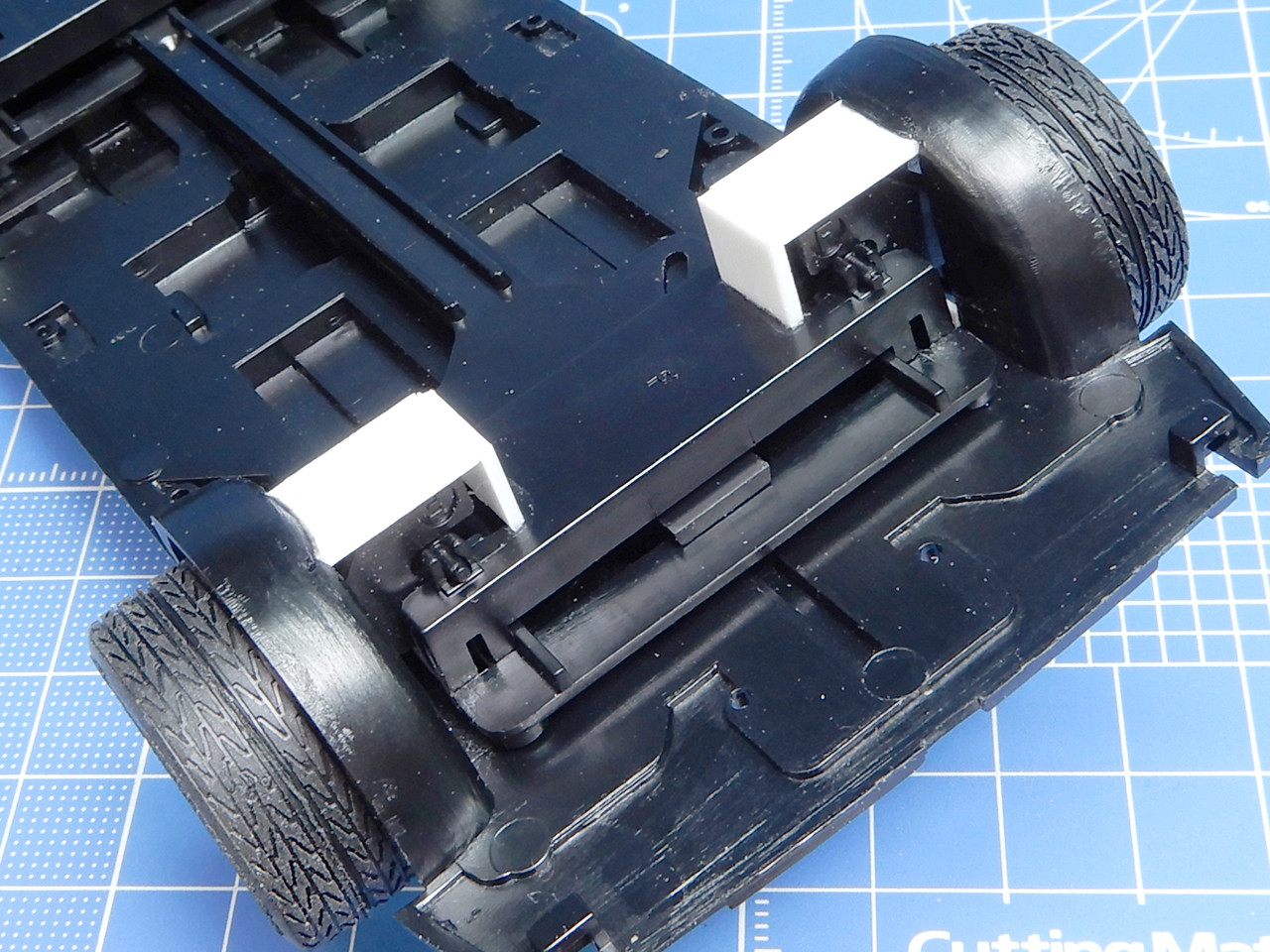
支えは、もうひとつ必要です。
左右にスライドする部分も、クリアランス確保から上下にブレが出ていましたので、プラ板で抑えを作りました。
これで平行移動の精度も高まり、展開途中でも安定した動きとなりました。
こんな感じで手を入れたことで、タイヤがブレずに垂直に収まり、スムーズな動きにする事ができました。
次はコレを電動化できないか思案中です。
作業がひと段落したら、また製作記を更新して行きたいと思いますので、よろしくお願いします^^
過去の作品で、製作記を書いて欲しいといったリクエストがあれば、ぜひお寄せ下さい。
出来る限り、ご要望にお応えしたいと思います。
以前は頻繁に製作記をブログで公開していたのですが、ツイッターの方が手軽で多くの方に見て頂ける感じでしたので、ブログから遠ざかっていました。
でも、鋼鉄ジーグの掲載告知をしてからアクセス状況を見てみたら、こんなロクに更新もしないブログを、毎日1000人くらいの方が見てくれていました。
これは何か応えないといけないと思い、製作記を再開してみようと思います。
と、いう訳で、デロリアンの製作記をスタートしてみます。
アオシマさんの1/24デロリアン、パートⅠタイプです。
この他、パートⅡ、パートⅢのタイプや、プルバック走行するミニタイプも発売されています。
エッチング付きのキットも発売されていますが、あいにく持っていませんので、こちらで製作したいと思います。
キットは、劇中と同様にタイヤが下を向いて、飛行形態になるギミックが付いています。
差し替えではなく、車体下のレバーをスライドさせて動かす構造になっていますが、これがよく考えられた仕組みで、感心しました。

本当は下を向いたタイヤは、シャーシーと水平になるはずですが、こちらはタイヤの面がシャーシーより下になってしまいます。
そんな不満な面も少々ありますが、このギミックは素晴らしいですね。
でも、どうも動きがスムーズにいかない場合があり、色々と調べてみたら、幾つかのポイントがありました。
まず、成型時の段差が出来てしまっている部分は、ちゃんと処理しなくてはなりません。
発売されてだいぶ経つキットですので、パーティングラインが強めに出ている様です。
変に当ってしまう部分が無い様に、しっかりと面出ししてあげましょう。
可動パーツには前後があります。

タイヤを下に向かせるロッドは、前後で違っています。
僅かな差なので、見落としてしまう場合があるかもしれませんが、これを間違えると上手く動作しません。
パーツにはすべて「F」と「R」が刻印されていて、前輪用と後輪用に分かれていますので、間違え無い様に組み立てましょう。
キットにはグリスも付いていて、これらの事に気を付けて組み立てれば、とてもスムーズにギミックうを楽しむ事ができます。
しかし、通常の走行状態にしてみると、タイヤがヘロヘロです。

重さでタイヤが傾き、常にグラグラしていて頼りない足回りになります。
これではギミックを無くして、固定してしまった方がマシですね。
とはいえ、折角のギミックを無くしてしまうのは大変惜しいので、何とかしてみようと思います。

まず、タイヤが傾いてしまう問題ですが、ロッドがクリアランス確保のために、フラフラと動いてしまうからだと思います。
タイヤボックスの内側にプラ板を追加して、ロッドを支えてブレを抑えました。
ちなみに、最初はホイールを裏から抑えるプラ板を追加してみたのですが、飛行状態にした時に干渉してしまうため、こんな方法を取っています。
支えは、もうひとつ必要です。
左右にスライドする部分も、クリアランス確保から上下にブレが出ていましたので、プラ板で抑えを作りました。
これで平行移動の精度も高まり、展開途中でも安定した動きとなりました。
こんな感じで手を入れたことで、タイヤがブレずに垂直に収まり、スムーズな動きにする事ができました。
次はコレを電動化できないか思案中です。
作業がひと段落したら、また製作記を更新して行きたいと思いますので、よろしくお願いします^^
過去の作品で、製作記を書いて欲しいといったリクエストがあれば、ぜひお寄せ下さい。
出来る限り、ご要望にお応えしたいと思います。
2021-04-03 22:54
コメント(10)
電動化 1 [デロリアン製作記]
通常走行状態から、車輪が下を向く飛行状態への変形機構が出来ましたが、悪いクセが出てきてしまいました。
この動きを電動化してみたくなったのです。
モーターと制御回路を組み込めば行けそうではありますが、1/24の車体内部は約半分が内装になっていますし、可動する仕組みが動くためのスペースも欲しいため、仕込める空間がほとんどありません。
デロリアンの車高の低さも難しくしてしまっている原因です。
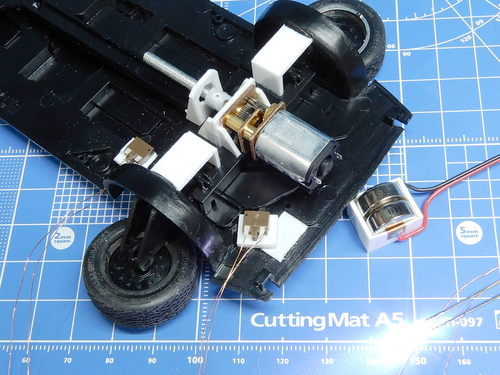
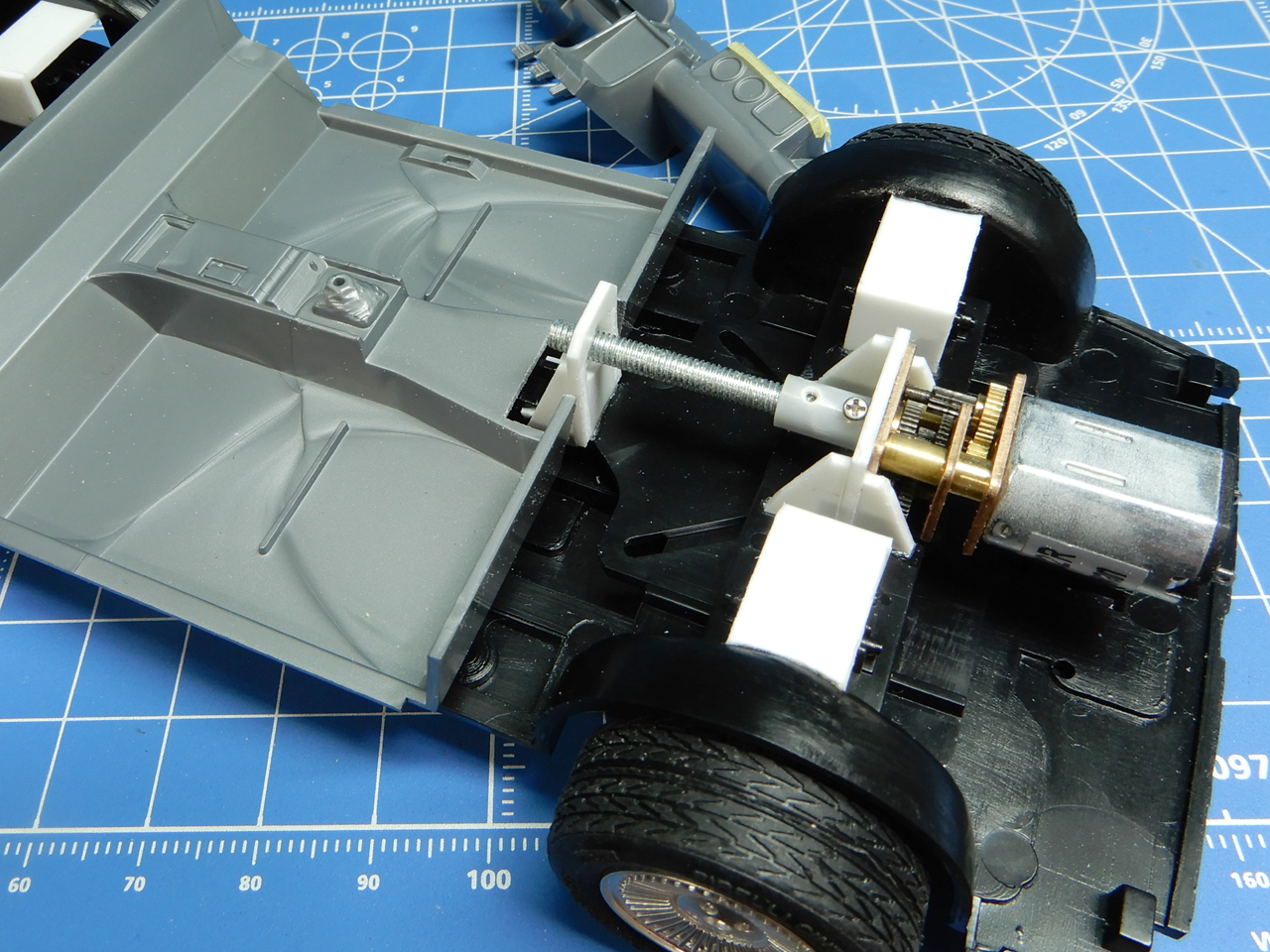
色々と検討した結果、フロント部分にモーターや回路を仕込む事にしました。
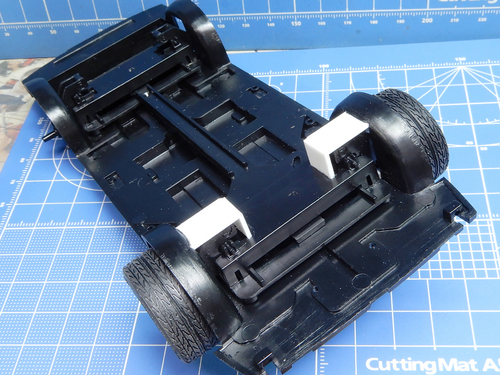
飛行状態にするためにしゃもじの様なパーツが前後にスライドしますが、移動間隔が約1.6cm必要です。
リア部分では、モーターを横向きにしないと、移動間隔を確保できません。
フロントでも、ボンネットとのスキマにモーターを収めるのは本当にギリギリなのですが、シンプルな仕組みで移動間隔を確保するには、ここが最適と考えました。
動かすための仕組みを考える時は、出来るだけシンプルで単純な機構にする事が大事で、故障やトラブルを回避する最善の近道になります。
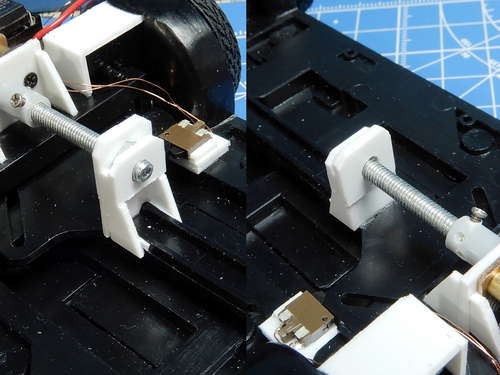
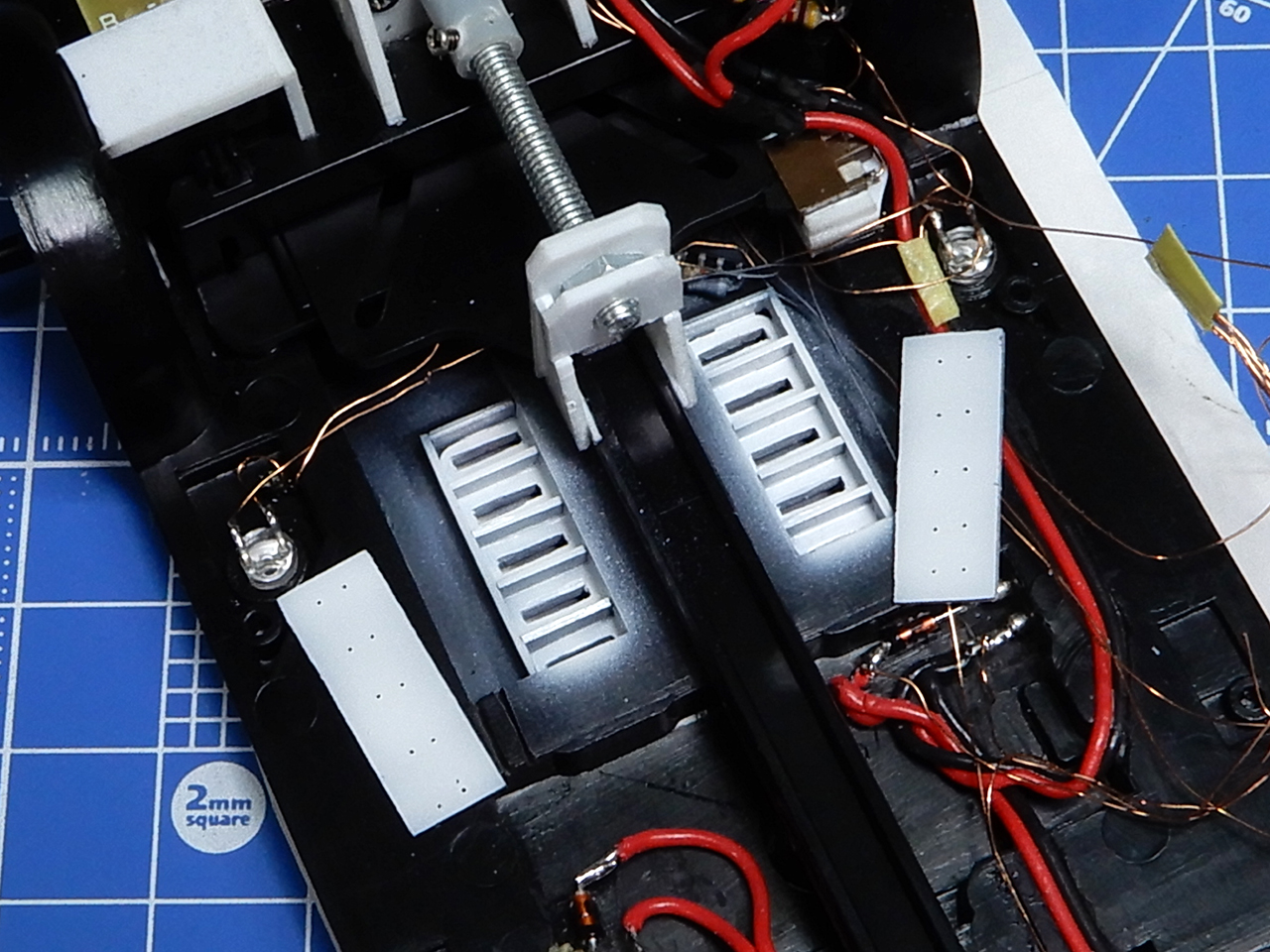
モーターを固定してみます。
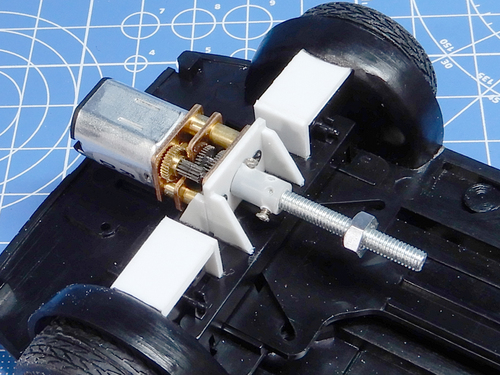
スライド機構の上にプラ板で取り付けるヒンジを作り、モーターをネジ止めしました。
トラブルがあった時、モーターを交換できる様にしておくトラブル対策も、今回の様にインストには載っていない工作を加える上では、とても大事なことです。
まぁ、トラブらないのが一番良いのですが^^
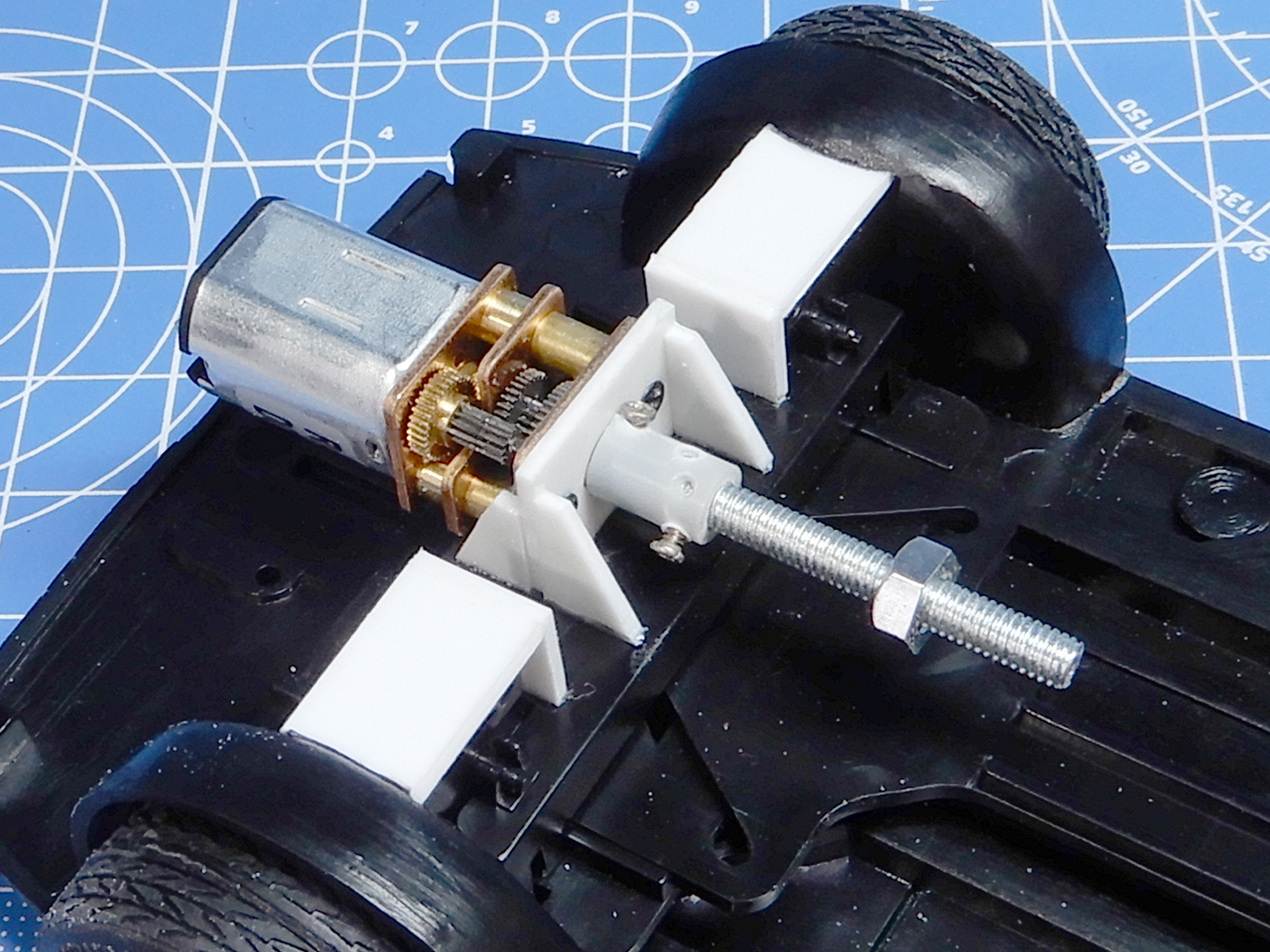
ご覧の様に、ネジを回転させて、ナットを平行移動させる仕組みにしようとしています。
回転数が早くてもナットの移動速度はゆっくりになりますので、モーターは60rpmでは無く、1:60回転のギヤードモーターを使いました。
ちなみに、これは秋葉原の千石電子通商で購入できます。
1:60のギア比ではトルクがかなり落ちますが、前回スライド機構をストレスなく可動させる工作を行っていますので、大丈夫だと思います。
ネジはモーターの軸と同じ3mm径で、25mmのネジの頭をカットして使用しました。
内径3mmのプラパイプを被せて繋ぎ、M1.4のネジで固定して空回りを防止しています。
ネジの他に開いている穴は、接続してから内部に瞬間接着剤を注入するための穴です。
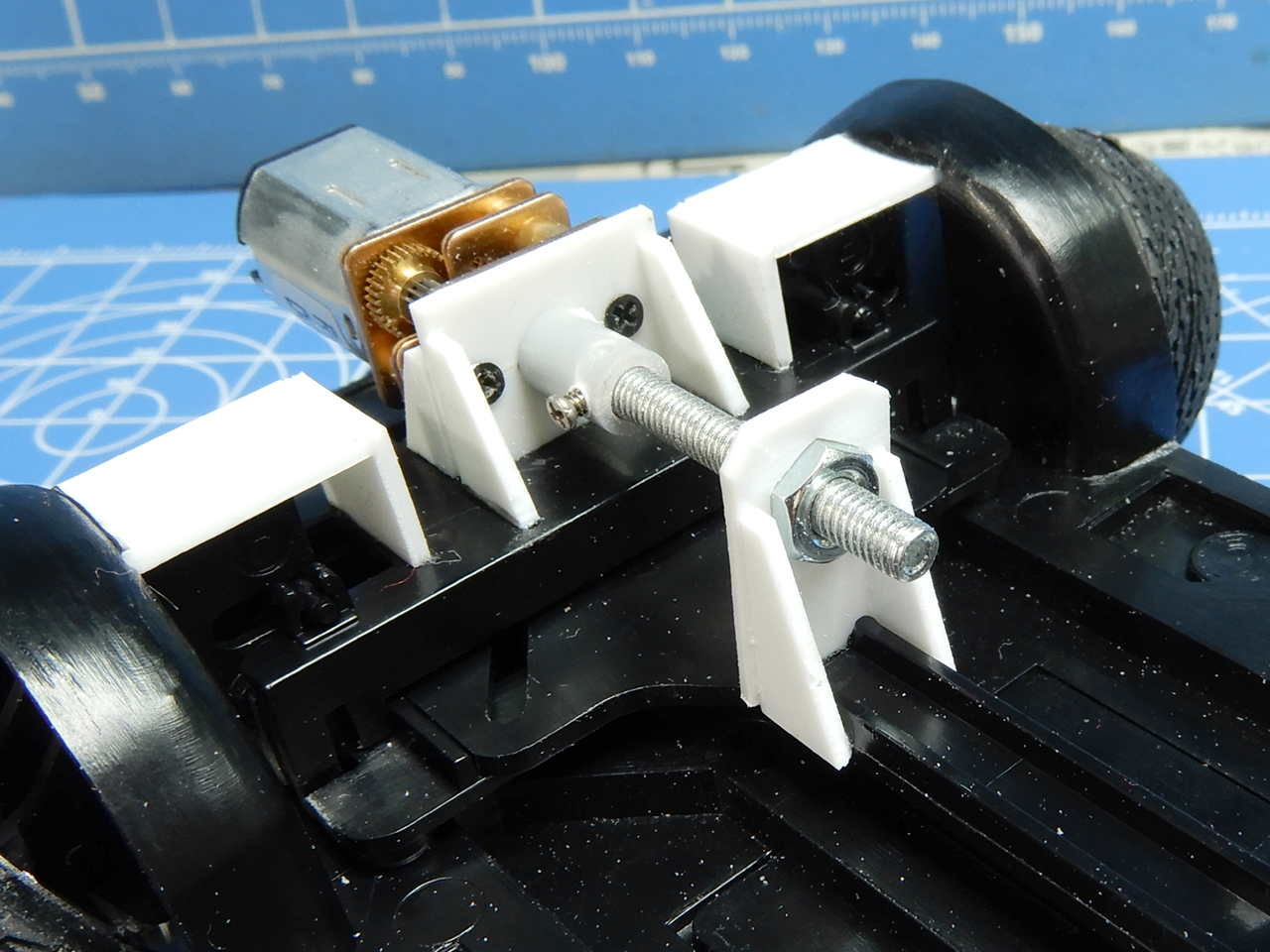
スライドさせる部分を作ります。
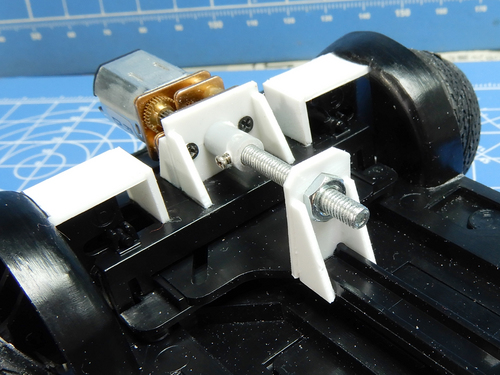
キットのスライドする部分に、プラ板でナットを固定する受けを作りました。
このナットが回転してしまっては台無しですので、6角形の穴を開けてしっかりと固定できるようにしています。
ネジが回転して、回転しないナットが平行移動することで、キットのスライド機構を前後に動かすワケですね。
ナットを仮に固定して動かしてみましたが、とりあえず無事に動いてくれて一安心です。
内装と干渉する部分をカットします。
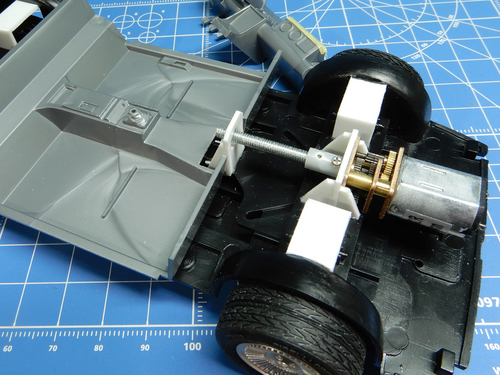
モーター&ネジで、かなり長い収納スペースが必要になりました。
内装のパーツに食い込んでしまうので、パーツをカットしています。
ここはインパネを取り付ければ見えなくなる空間ですので、この位のカットならへっちゃらです。
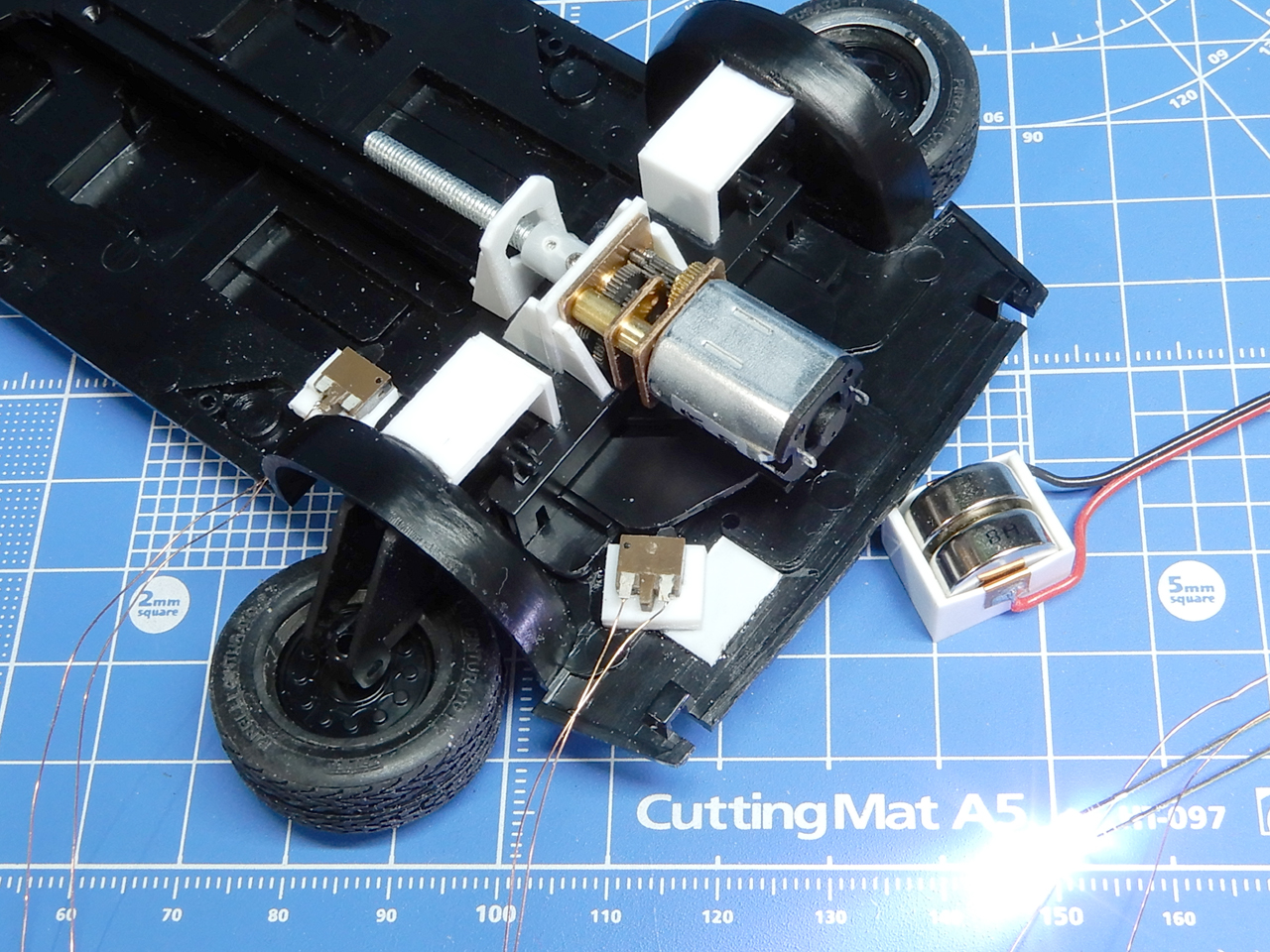
リミットスイッチを取り付けます。
モーターを人間の感覚でON/OFFしたら絶対に壊しますね。
ここはマイコンに制御してもらいましょう。
スライド機構が限界まで移動したら、スイッチがONになる様にします。
マイコンはこのON信号を検知して、モーターをストップさせます。
スイッチはノーマル状態の限界位置と、飛行状態の限界位置を検知するため2個必要です。
取り付け位置は僅かにズレただけでもモーターやナットの固定部分に致命的なダメージを与えますので、慎重に位置決めしなくてはなりません。
かといって、実際に動かしながら位置を調整するなんて、恐くて出来ませんね。
そこで、ボタン電池でLEDが光る簡単な導通チェッカーを作りました。
ナットを外してスライドが自由に動かせる状態にしてから、ギリギリでスイッチがONになる位置を慎重に探して固定しています。
通常走行と飛行状態の切替は、赤外線フォトリフレクタで自動的に切り替わる様にしようと計画していましたが、感度不足(1cm程度しか反応しない&アナログ的な電圧変化&白色のみ反応)で使い物にならなかったので、あきらめてどこかに手動スイッチを仕込もうと思います。
次回は、マイコンを使った制御回路の製作をご紹介します。
よろしくお付き合い下さい。
この動きを電動化してみたくなったのです。
モーターと制御回路を組み込めば行けそうではありますが、1/24の車体内部は約半分が内装になっていますし、可動する仕組みが動くためのスペースも欲しいため、仕込める空間がほとんどありません。
デロリアンの車高の低さも難しくしてしまっている原因です。
色々と検討した結果、フロント部分にモーターや回路を仕込む事にしました。
飛行状態にするためにしゃもじの様なパーツが前後にスライドしますが、移動間隔が約1.6cm必要です。
リア部分では、モーターを横向きにしないと、移動間隔を確保できません。
フロントでも、ボンネットとのスキマにモーターを収めるのは本当にギリギリなのですが、シンプルな仕組みで移動間隔を確保するには、ここが最適と考えました。
動かすための仕組みを考える時は、出来るだけシンプルで単純な機構にする事が大事で、故障やトラブルを回避する最善の近道になります。
モーターを固定してみます。
スライド機構の上にプラ板で取り付けるヒンジを作り、モーターをネジ止めしました。
トラブルがあった時、モーターを交換できる様にしておくトラブル対策も、今回の様にインストには載っていない工作を加える上では、とても大事なことです。
まぁ、トラブらないのが一番良いのですが^^
ご覧の様に、ネジを回転させて、ナットを平行移動させる仕組みにしようとしています。
回転数が早くてもナットの移動速度はゆっくりになりますので、モーターは60rpmでは無く、1:60回転のギヤードモーターを使いました。
ちなみに、これは秋葉原の千石電子通商で購入できます。
1:60のギア比ではトルクがかなり落ちますが、前回スライド機構をストレスなく可動させる工作を行っていますので、大丈夫だと思います。
ネジはモーターの軸と同じ3mm径で、25mmのネジの頭をカットして使用しました。
内径3mmのプラパイプを被せて繋ぎ、M1.4のネジで固定して空回りを防止しています。
ネジの他に開いている穴は、接続してから内部に瞬間接着剤を注入するための穴です。
スライドさせる部分を作ります。
キットのスライドする部分に、プラ板でナットを固定する受けを作りました。
このナットが回転してしまっては台無しですので、6角形の穴を開けてしっかりと固定できるようにしています。
ネジが回転して、回転しないナットが平行移動することで、キットのスライド機構を前後に動かすワケですね。
ナットを仮に固定して動かしてみましたが、とりあえず無事に動いてくれて一安心です。
内装と干渉する部分をカットします。
モーター&ネジで、かなり長い収納スペースが必要になりました。
内装のパーツに食い込んでしまうので、パーツをカットしています。
ここはインパネを取り付ければ見えなくなる空間ですので、この位のカットならへっちゃらです。
リミットスイッチを取り付けます。
モーターを人間の感覚でON/OFFしたら絶対に壊しますね。
ここはマイコンに制御してもらいましょう。
スライド機構が限界まで移動したら、スイッチがONになる様にします。
マイコンはこのON信号を検知して、モーターをストップさせます。
スイッチはノーマル状態の限界位置と、飛行状態の限界位置を検知するため2個必要です。
取り付け位置は僅かにズレただけでもモーターやナットの固定部分に致命的なダメージを与えますので、慎重に位置決めしなくてはなりません。
かといって、実際に動かしながら位置を調整するなんて、恐くて出来ませんね。
そこで、ボタン電池でLEDが光る簡単な導通チェッカーを作りました。
ナットを外してスライドが自由に動かせる状態にしてから、ギリギリでスイッチがONになる位置を慎重に探して固定しています。
通常走行と飛行状態の切替は、赤外線フォトリフレクタで自動的に切り替わる様にしようと計画していましたが、感度不足(1cm程度しか反応しない&アナログ的な電圧変化&白色のみ反応)で使い物にならなかったので、あきらめてどこかに手動スイッチを仕込もうと思います。
次回は、マイコンを使った制御回路の製作をご紹介します。
よろしくお付き合い下さい。
2021-04-05 23:56
コメント(6)
電動化 2 [デロリアン製作記]
今回は電動化の後編です^^
モーターを逆転させたり、正確な位置で停止させるのは手動では無理ですので、マイコンにお願いしちゃいます。
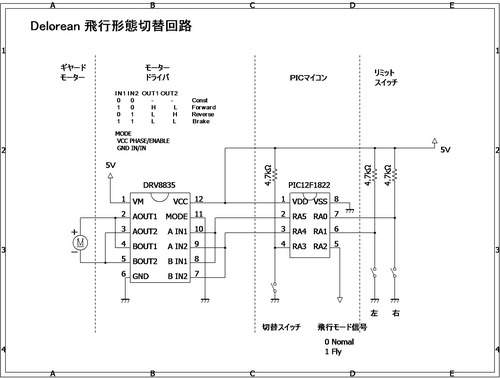
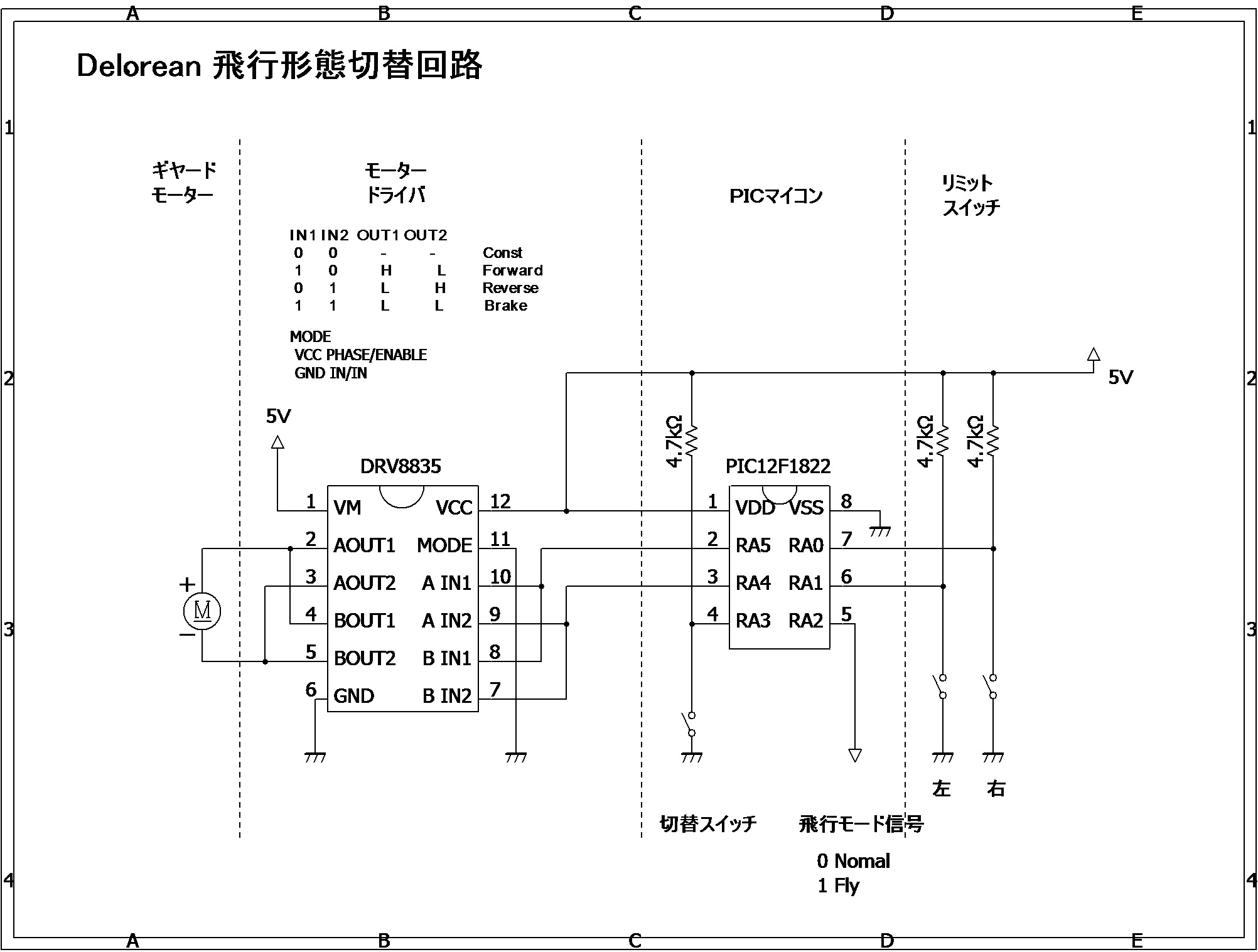
いきなりですが、回路図です。
簡単に回路の説明をさせて頂きますね。
一番右端にある2個のスイッチが、前回取り付けた停止位置を検出するためのスイッチです。
普段は4.7kΩの抵抗で5Vに繋げれていて、PICマイコンPIC12F1822のRA0とRA1の端子は5Vになっています。
スイッチがONになるとマイナスに繋がって、繋がっている端子が0Vになります。
ONの時に0になるので、ヘンテコな感じがしますが、この電圧の変化を検知すればスイッチのON/OFFがわかるワケですね。
DRV8835は、モータードライバICです。
内部にAB2つの制御回路が入っているので、AとBを繋いで1つの回路にして出力を上げています。
DRV8835には、IN1とIN2の二つのコントロール端子があって、それぞれの端子にどの様に5Vを加えるかによってモーターの動きを制御できます。
1(5V)と0(0V)にすれば正転、0と1にすれば逆転、1と1ならストップ、組み合わせ方でモーターを正転・逆転・ストップさせることが出来ます。
つまり、2本の端子にどう出力するかで、モーターを自在にコントロール出来るわけです。
プログラムの内容については、後で説明しますね。
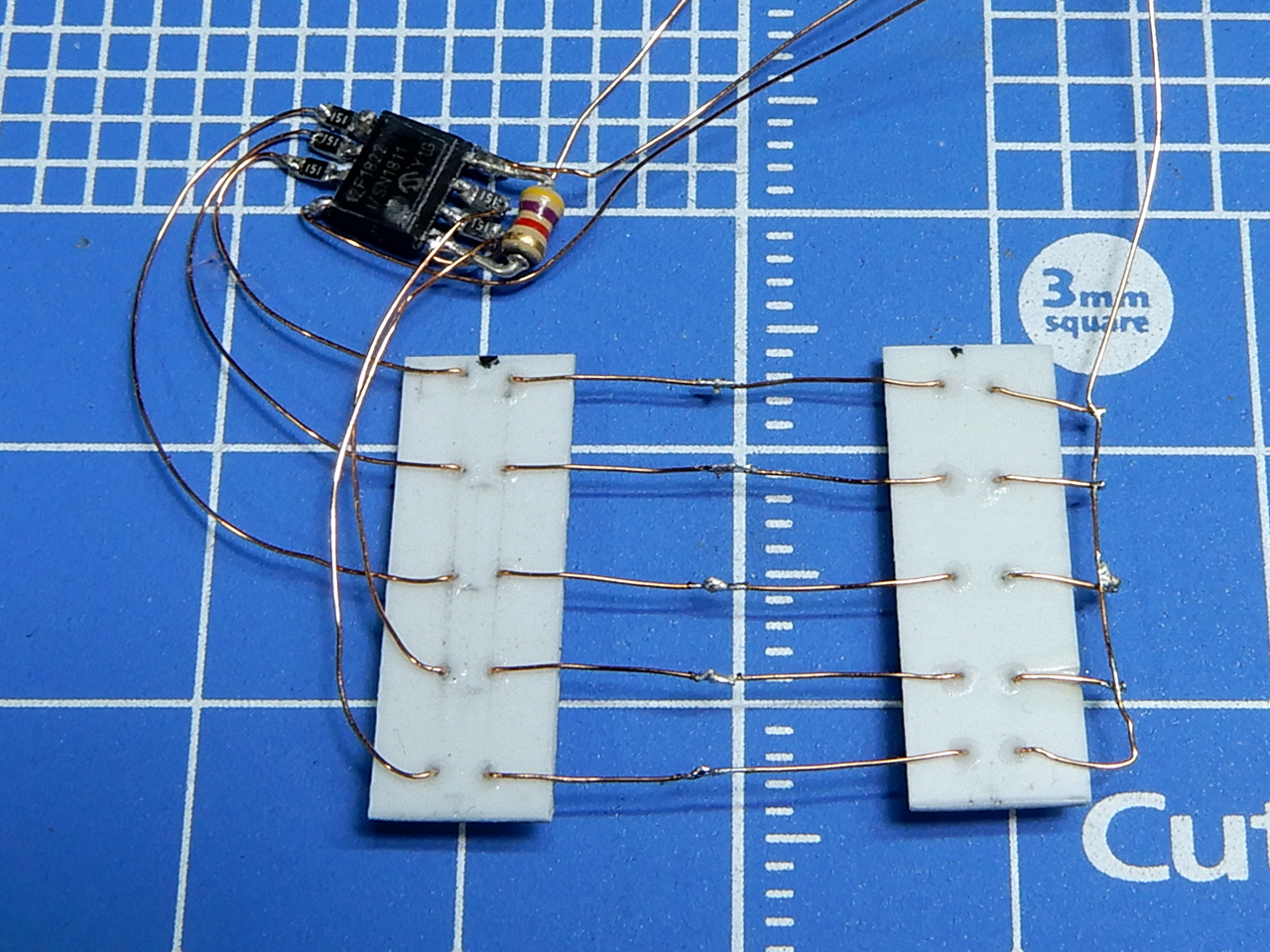
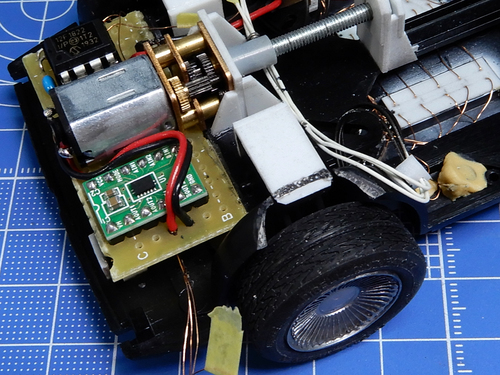
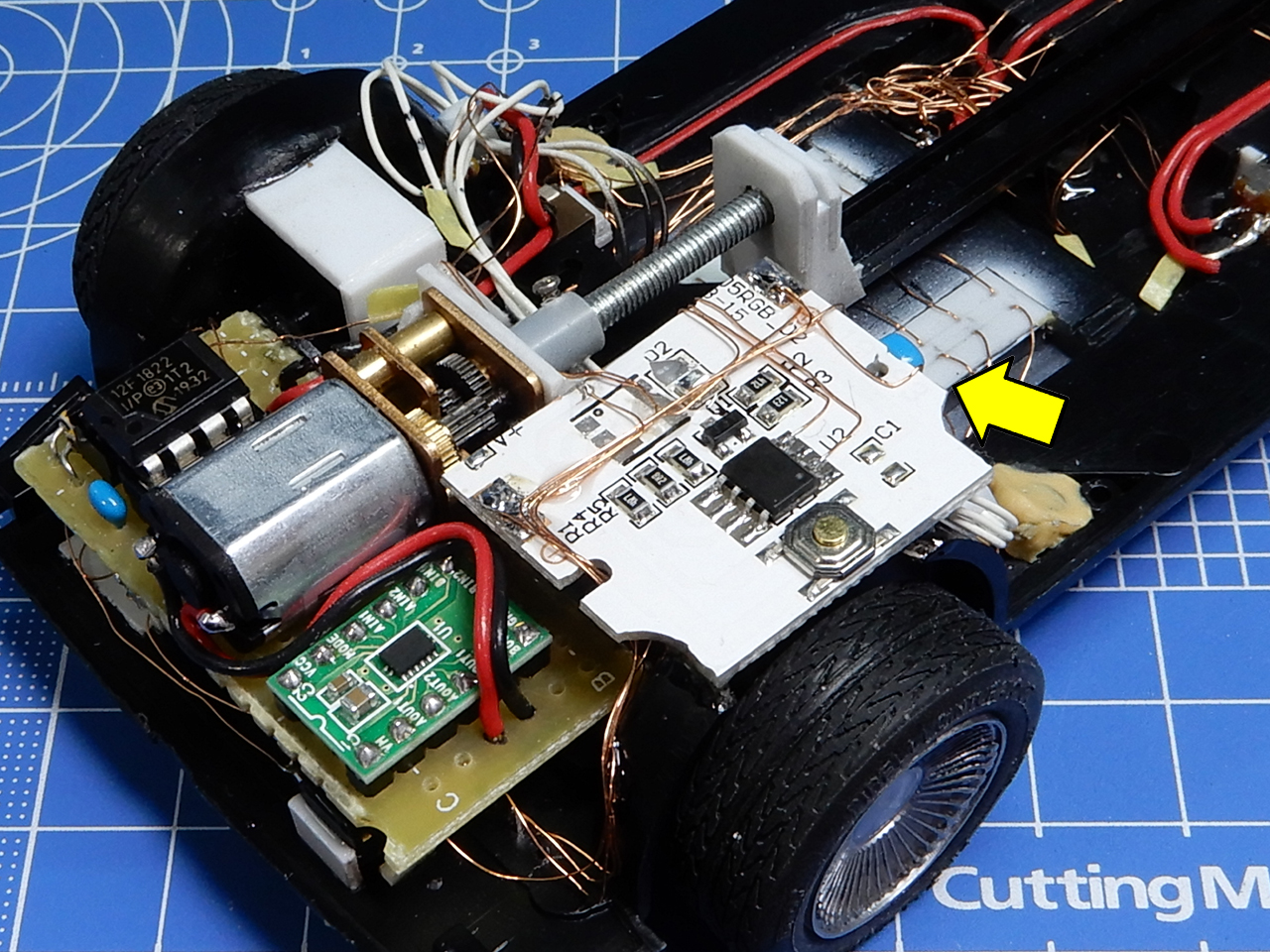
制御回路を基板に組み立てました。
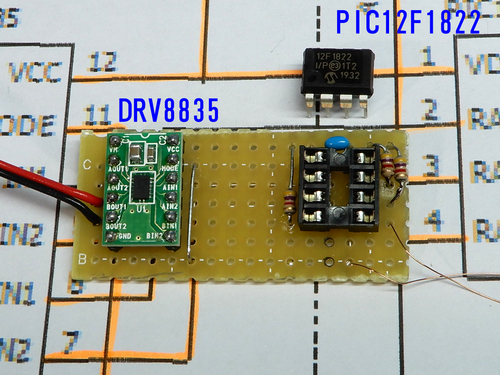
右のソケットに、PIC12F1822マイコンをセットします。
左の緑色の基板がモータードライバIC、DRV8835です。
出来るだけ小さく組み立てました。
切替の操作スイッチは、シャーシに穴を開けてプッシュスイッチを取り付けています。
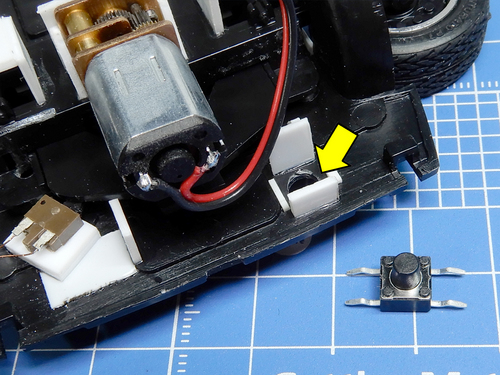
ボディー側の外観を壊したくなかったので、目立たないけど操作しやすい車体の下にスイッチを付けました。
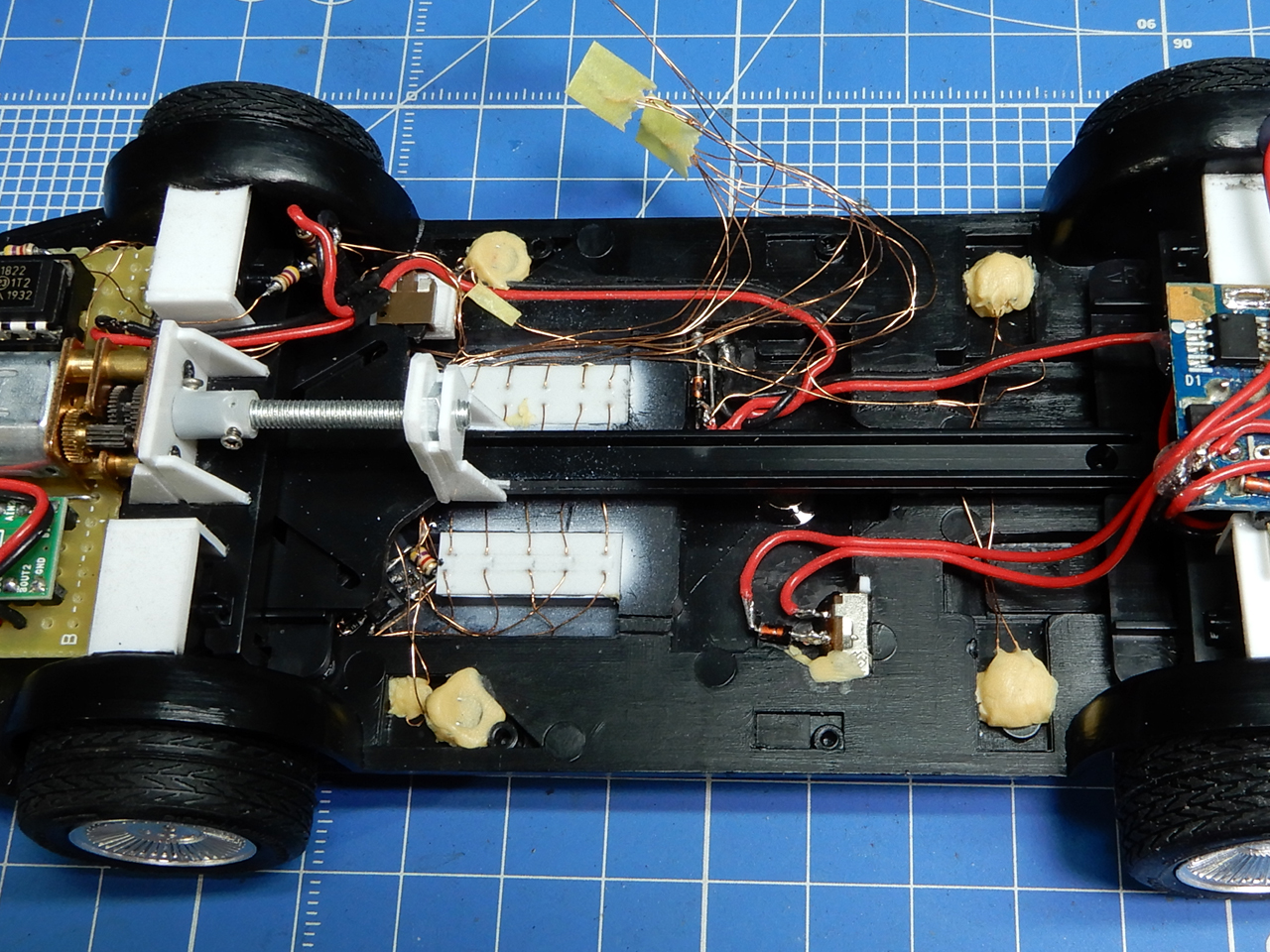
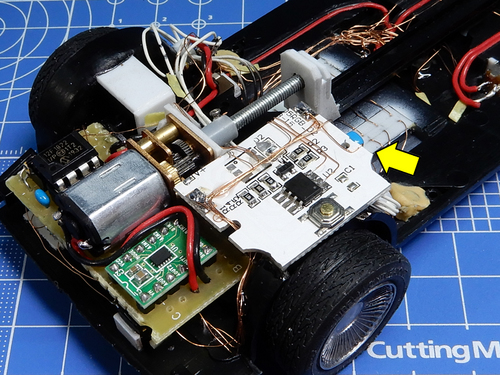
基板を取り付け、モーターやリミットスイッチと接続します。
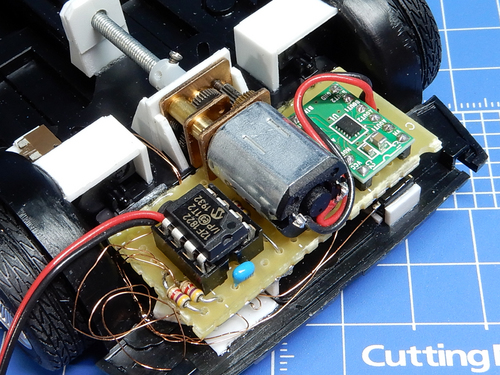
モーターの下に潜り込むようなかたちで制御回路を配置しました。
もうこれでボンネットの中はパンパンです。
回転するネジに平行移動するナットを固定します。
六角形の穴にナットが収まっているので、それが外れないように前後からプラ板で挟む様に固定しました。
ここは大きな力が加わる部分ですので、しっかりと固定しています。
さて、ここからプログラムの説明です。
マイコンのプログラムは、こんな流れで動きます。
電源がONになると、マイコンは2つのリミットスイッチの状態を調べて、今が通常状態なのか、飛行状態なのか、モードをチェックします。
どちらのスイッチもOFFなら、動作の途中で電源が切られたと判断して、通常状態にします。
そして切替スイッチが押されるのを、ずーっと待ちます。
スイッチが押されたら、今通常状態なら飛行状態へ、飛行状態なら通常状態になるように、RA4端子とRA5端子に出力してDRV8835へ正転/逆転の指令を出し、リミットスイッチがONになるまでモーターを回転させます。
モードをセットして、また切替スイッチが押されるのをずーっと待ち続けます。
実際のプログラムです。
初期設定の部分は割愛しています。
1~3 マイコンの初期設定部分です。動作周波数を8MHzにしています。
5 toNOMAL()という関数を宣言しました。
モーターを逆転させて、通常走行状態にして戻るサブルーチンです。
6~7 RA4とRA5に逆転の信号をセットして、モーターを逆転させます。
8 RA1側のリミットスイッチがONになるまで待ちます。
9~10 RA4とRA5に強制ブレーキの信号をセットして、惰性で回ろうとする
モーターに強制的にブレーキをかけます。
11 ブレーキが効くまで100ms待ちます。
12~13 モーターに電圧をかけたままでは焼けてしまいますから、OFFにします。
16~25 同様に、toFLY()という飛行状態にする関数も宣言しておきます。
27 ここからがプログラム本体です。
29 マイコンの動作周波数を8MHzにセットします。
30 端子は全てデジタルで使う宣言をします。
31 RA0,1,3 (7番、6番、4番)の端子を入力端子として使う宣言です。
33 端子を全て0にセットします。
34 modeという変数を宣言します。0は通常状態、1は飛行状態です。
35 RA2端子は、ほかのマイコンへmodeを知らせる信号を出力します。
あとで車体裏の発光部分や車輪の発光をこの信号で制御します。
38~50 電源ONで、今の状態をチェックしてmodeをセットしています。
リミットスイッチがどちらもOFFなら、通常状態に変形させます。
52 ここから 65 行まで永久ループで、プログラムはずっと終わりません。
53 切替スイッチが押されたら、64 行までのプログラムが実行されます。
54~58 今通常状態なら、modeを飛行状態にセットして、RA2端子を1にします。
飛行状態にする関数 toFLY()を実行して、またループに戻ります。
59~63 今飛行状態なら、modeを通常状態にセットして、RA2端子を0にします。
通常状態にする関数 toNOMAL() を実行して、またループに戻ります。
プログラムリストと説明を照らし合わせて読んで頂ければ、動作の仕組みをご理解いただけると思います。
回路とプログラムが非常に密接した関係であることがおわかり頂けると思います。
いやらしくて恐縮ですが、回路の仕組みやプログラムの内容は「電飾しましょっ!2 PIC編」や「電飾しましょっ!3Tips編」で詳しく解説していますので、興味のある方はぜひお求め下さい。
次回はまた作業がひと段落したら記事にします。
よろしくお願い致します!
モーターを逆転させたり、正確な位置で停止させるのは手動では無理ですので、マイコンにお願いしちゃいます。
いきなりですが、回路図です。
簡単に回路の説明をさせて頂きますね。
一番右端にある2個のスイッチが、前回取り付けた停止位置を検出するためのスイッチです。
普段は4.7kΩの抵抗で5Vに繋げれていて、PICマイコンPIC12F1822のRA0とRA1の端子は5Vになっています。
スイッチがONになるとマイナスに繋がって、繋がっている端子が0Vになります。
ONの時に0になるので、ヘンテコな感じがしますが、この電圧の変化を検知すればスイッチのON/OFFがわかるワケですね。
DRV8835は、モータードライバICです。
内部にAB2つの制御回路が入っているので、AとBを繋いで1つの回路にして出力を上げています。
DRV8835には、IN1とIN2の二つのコントロール端子があって、それぞれの端子にどの様に5Vを加えるかによってモーターの動きを制御できます。
1(5V)と0(0V)にすれば正転、0と1にすれば逆転、1と1ならストップ、組み合わせ方でモーターを正転・逆転・ストップさせることが出来ます。
つまり、2本の端子にどう出力するかで、モーターを自在にコントロール出来るわけです。
プログラムの内容については、後で説明しますね。
制御回路を基板に組み立てました。

右のソケットに、PIC12F1822マイコンをセットします。
左の緑色の基板がモータードライバIC、DRV8835です。
出来るだけ小さく組み立てました。
切替の操作スイッチは、シャーシに穴を開けてプッシュスイッチを取り付けています。

ボディー側の外観を壊したくなかったので、目立たないけど操作しやすい車体の下にスイッチを付けました。
基板を取り付け、モーターやリミットスイッチと接続します。

モーターの下に潜り込むようなかたちで制御回路を配置しました。
もうこれでボンネットの中はパンパンです。
回転するネジに平行移動するナットを固定します。
六角形の穴にナットが収まっているので、それが外れないように前後からプラ板で挟む様に固定しました。
ここは大きな力が加わる部分ですので、しっかりと固定しています。
さて、ここからプログラムの説明です。
マイコンのプログラムは、こんな流れで動きます。
電源がONになると、マイコンは2つのリミットスイッチの状態を調べて、今が通常状態なのか、飛行状態なのか、モードをチェックします。
どちらのスイッチもOFFなら、動作の途中で電源が切られたと判断して、通常状態にします。
そして切替スイッチが押されるのを、ずーっと待ちます。
スイッチが押されたら、今通常状態なら飛行状態へ、飛行状態なら通常状態になるように、RA4端子とRA5端子に出力してDRV8835へ正転/逆転の指令を出し、リミットスイッチがONになるまでモーターを回転させます。
モードをセットして、また切替スイッチが押されるのをずーっと待ち続けます。
実際のプログラムです。
初期設定の部分は割愛しています。
#include//#include "stdlib.h" #define _XTAL_FREQ 8000000 void toNOMAL(){ //通常状態(車輪収納) RA4=0; //モーター逆転 RA5=1; while(RA1==1){} //リミットスイッチONになるまでループ RA4=1; //強制ブレーキ RA5=1; __delay_ms(100); RA4=0; //モーターパワーオフ RA5=0; } void toFLY(){ //飛行状態(車輪展開) RA4=1; //モーター正転 RA5=0; while(RA0==1){} //リミットスイッチONになるまでループ RA4=1; //強制ブレーキ RA5=1; __delay_ms(100); RA4=0; //モーターパワーオフ RA5=0; } void main(void) { OSCCON = 0b01110010; //内部クロック8MHz 4MHz 0b01101010 ANSELA = 0b00000000; // アナログは使用しない TRISA = 0b00001011; // RA0,1,3だけ入力に設定 PORTA=0; // 出力ピンの初期化(全てLOWにする) int mode=0; //状態 0:通常 1:飛行 RA2=0; //状態信号 0:通常 1:飛行 //起動時に状態をチェックする----------------------------- if(RA0==0){ //現在飛行状態 mode=1; RA2=1; } if(RA1==0){ //現在通常状態 mode=0; RA2=0; } if(RA0==1 && RA1==1){ //どちらもOFFなら通常状態に toNOMAL(); //変形中に電源切られたかも mode=0; RA2=0; } //切替スイッチが押されたらモード変更 while(1){ if(RA3==0){ //切替スイッチが押された if(mode==0){ //今、通常状態なら mode=1; RA2=1; toFLY(); //飛行状態へ } else{ //今、飛行状態と判断 mode=0; RA2=0; toNOMAL(); //通常状態へ } } } //End of while } //End of main
1~3 マイコンの初期設定部分です。動作周波数を8MHzにしています。
5 toNOMAL()という関数を宣言しました。
モーターを逆転させて、通常走行状態にして戻るサブルーチンです。
6~7 RA4とRA5に逆転の信号をセットして、モーターを逆転させます。
8 RA1側のリミットスイッチがONになるまで待ちます。
9~10 RA4とRA5に強制ブレーキの信号をセットして、惰性で回ろうとする
モーターに強制的にブレーキをかけます。
11 ブレーキが効くまで100ms待ちます。
12~13 モーターに電圧をかけたままでは焼けてしまいますから、OFFにします。
16~25 同様に、toFLY()という飛行状態にする関数も宣言しておきます。
27 ここからがプログラム本体です。
29 マイコンの動作周波数を8MHzにセットします。
30 端子は全てデジタルで使う宣言をします。
31 RA0,1,3 (7番、6番、4番)の端子を入力端子として使う宣言です。
33 端子を全て0にセットします。
34 modeという変数を宣言します。0は通常状態、1は飛行状態です。
35 RA2端子は、ほかのマイコンへmodeを知らせる信号を出力します。
あとで車体裏の発光部分や車輪の発光をこの信号で制御します。
38~50 電源ONで、今の状態をチェックしてmodeをセットしています。
リミットスイッチがどちらもOFFなら、通常状態に変形させます。
52 ここから 65 行まで永久ループで、プログラムはずっと終わりません。
53 切替スイッチが押されたら、64 行までのプログラムが実行されます。
54~58 今通常状態なら、modeを飛行状態にセットして、RA2端子を1にします。
飛行状態にする関数 toFLY()を実行して、またループに戻ります。
59~63 今飛行状態なら、modeを通常状態にセットして、RA2端子を0にします。
通常状態にする関数 toNOMAL() を実行して、またループに戻ります。
プログラムリストと説明を照らし合わせて読んで頂ければ、動作の仕組みをご理解いただけると思います。
回路とプログラムが非常に密接した関係であることがおわかり頂けると思います。
いやらしくて恐縮ですが、回路の仕組みやプログラムの内容は「電飾しましょっ!2 PIC編」や「電飾しましょっ!3Tips編」で詳しく解説していますので、興味のある方はぜひお求め下さい。
次回はまた作業がひと段落したら記事にします。
よろしくお願い致します!
2021-04-07 23:08
コメント(4)
電池内蔵 [デロリアン製作記]
電池を内蔵可能にして、電源無しでもOKにしました。
電飾する模型を作る時は、まず最初に電源をどうするか決めなくてはなりません。
それによって、LEDの数に制限が出来たり、LEDを抵抗で保護するのか、CRDを使うのか、回路の設計だって違ってきます。
途中まで進んでしまってから電源が変わってしまうと、最初から設計をやり直さなくてはならなくなります。
今回は飛行状態の電動化が出来るのか、やってみなくちゃ判らなかったので、そこから手を付けていますが、本当は電源を決めてから着手する工作です。
幸い、上手く動いてくれたので、電源は5Vに決定です。
5VならUSB端子を作れば簡単に電源を確保できますが、常にケーブルが刺さったデロリアンでは、ちょっとカッコ悪いですよね。
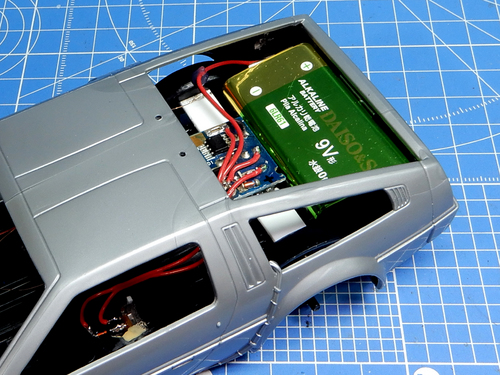
そこで、電池を内蔵させる事にしました。

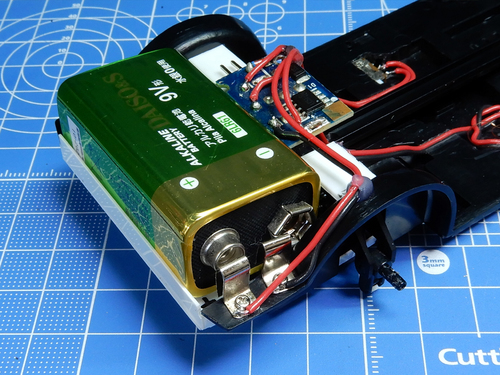
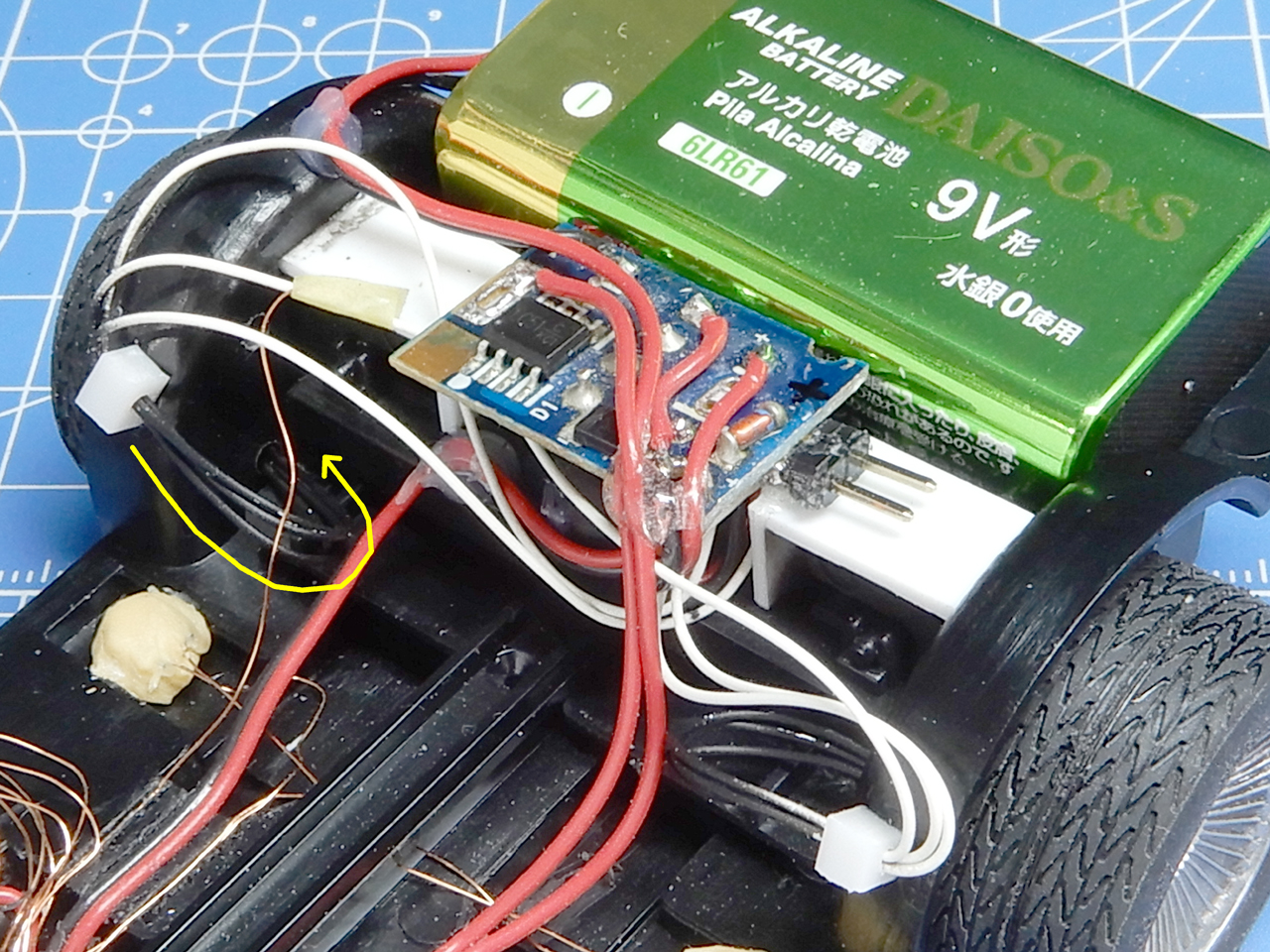
電池は5V以上で大きい方がありがたいので、9Vの角型電池にしました。
モバイルバッテリーを分解して仕込むことも検討しましたが、サイズと容量から断念しています。
キットのリア部分をカットして、プラ板で箱を作り、電池が収まるスペースを作りました。
飛行状態へのギミックをフロント部分へギュウギュウに詰め込んで、リア部分には一切手を出さなかったのは、この電池を仕込むスペースを取って置きたかったからです。
電池は9Vなので、マイコンやモーターで使う5Vにコンバートしなくてはなりません。

百円ショップの、車用シガーライターソケットからUSB電源を取り出すアダプタを使います。
ちゃんとしたスイッチング電源なので、3端子レギュレーターの様な発熱がありませんので、ボクは良く使わせてもらっています。
でも、これでもちょっと大きいので、USBコネクタやLEDを外したり、基板をカットして更に小さくしました。
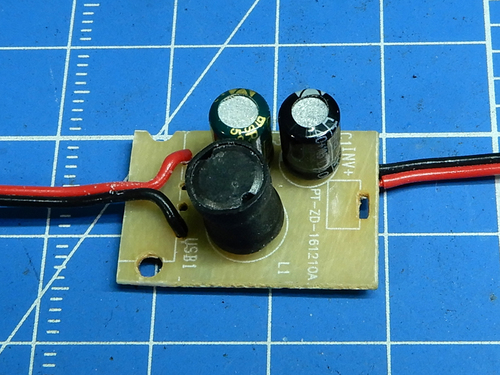
約2cmまで小さくなりました。
こんなに小さくても、12Vや9Vから安定した5V/1Aを作ってくれます。
スイッチング式は必要な電力分しか変換しないため、電池の持ちも良くなります。
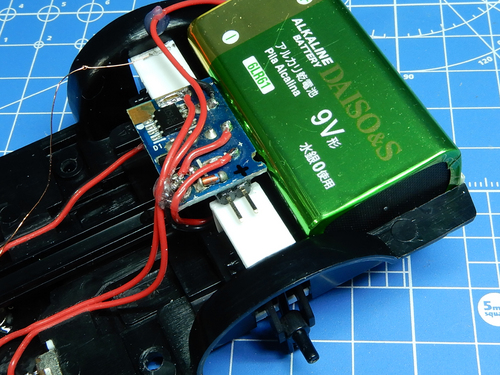
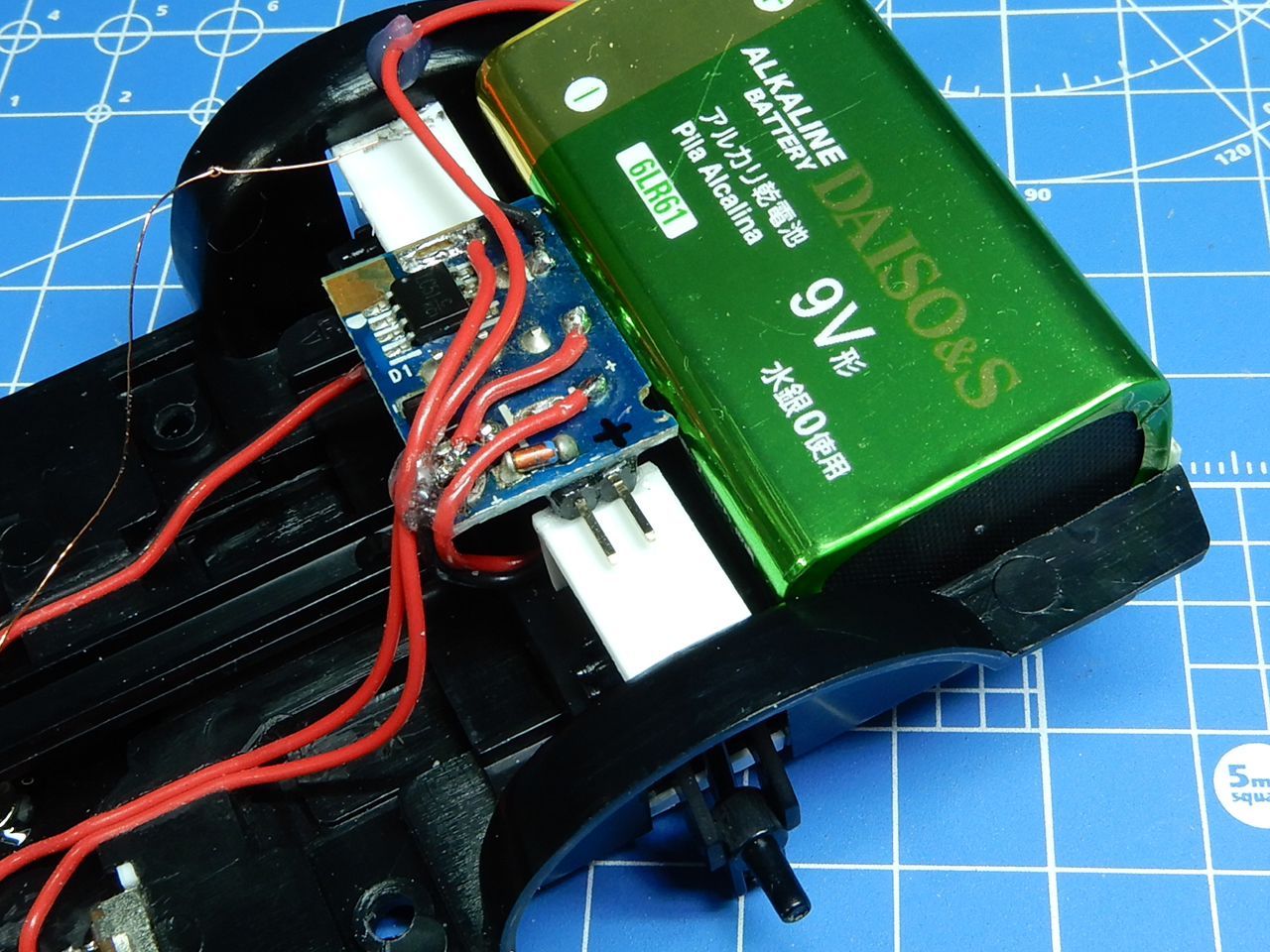
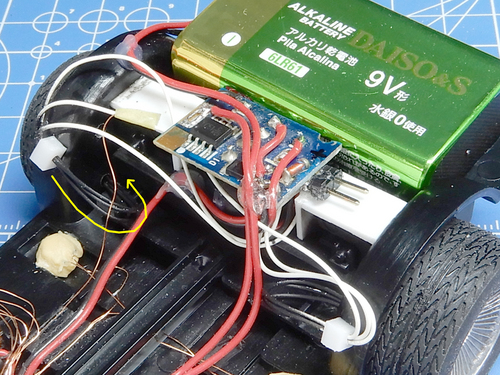
この電圧コンバータを取り付けてみました。
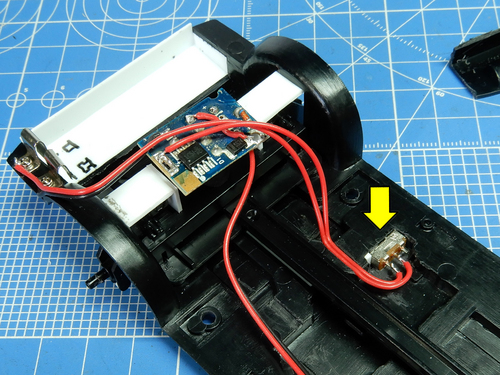
リアの僅かな空間に、逆さまにして取り付けています。
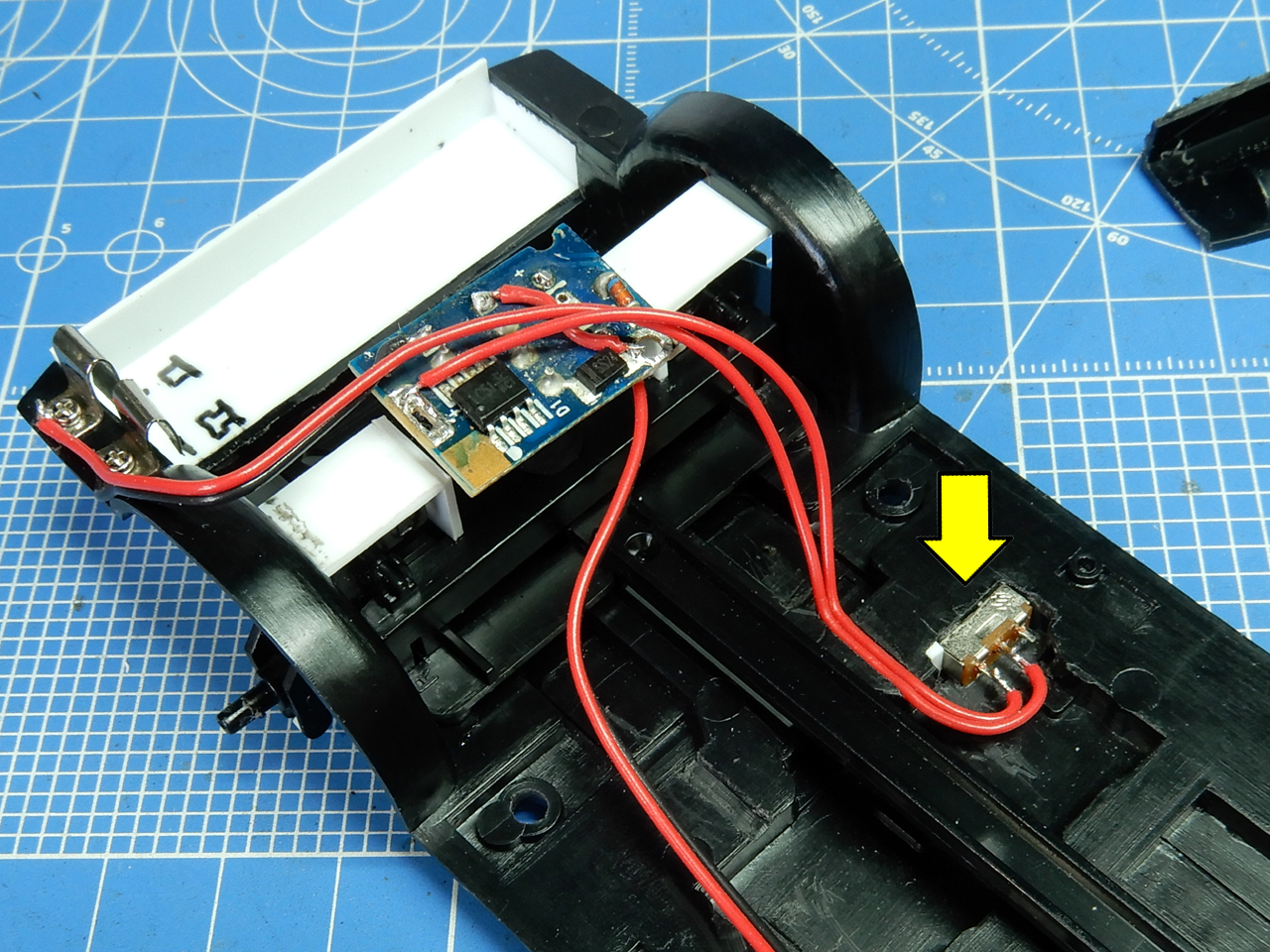
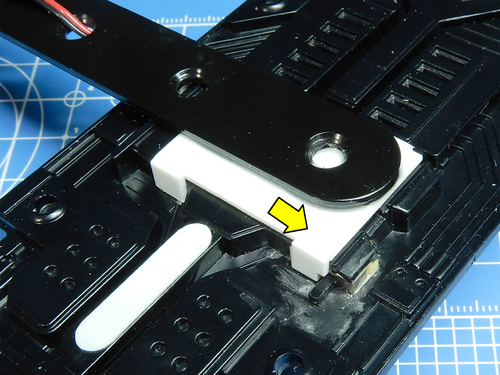
電源スイッチは、車体下の窪んだ部分を利用して、スライドスイッチを取り付けています。
なんでこんな操作しにくい場所に仕込んだのかは、後で説明しますね。
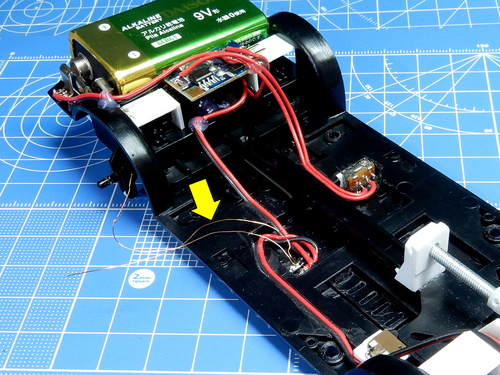
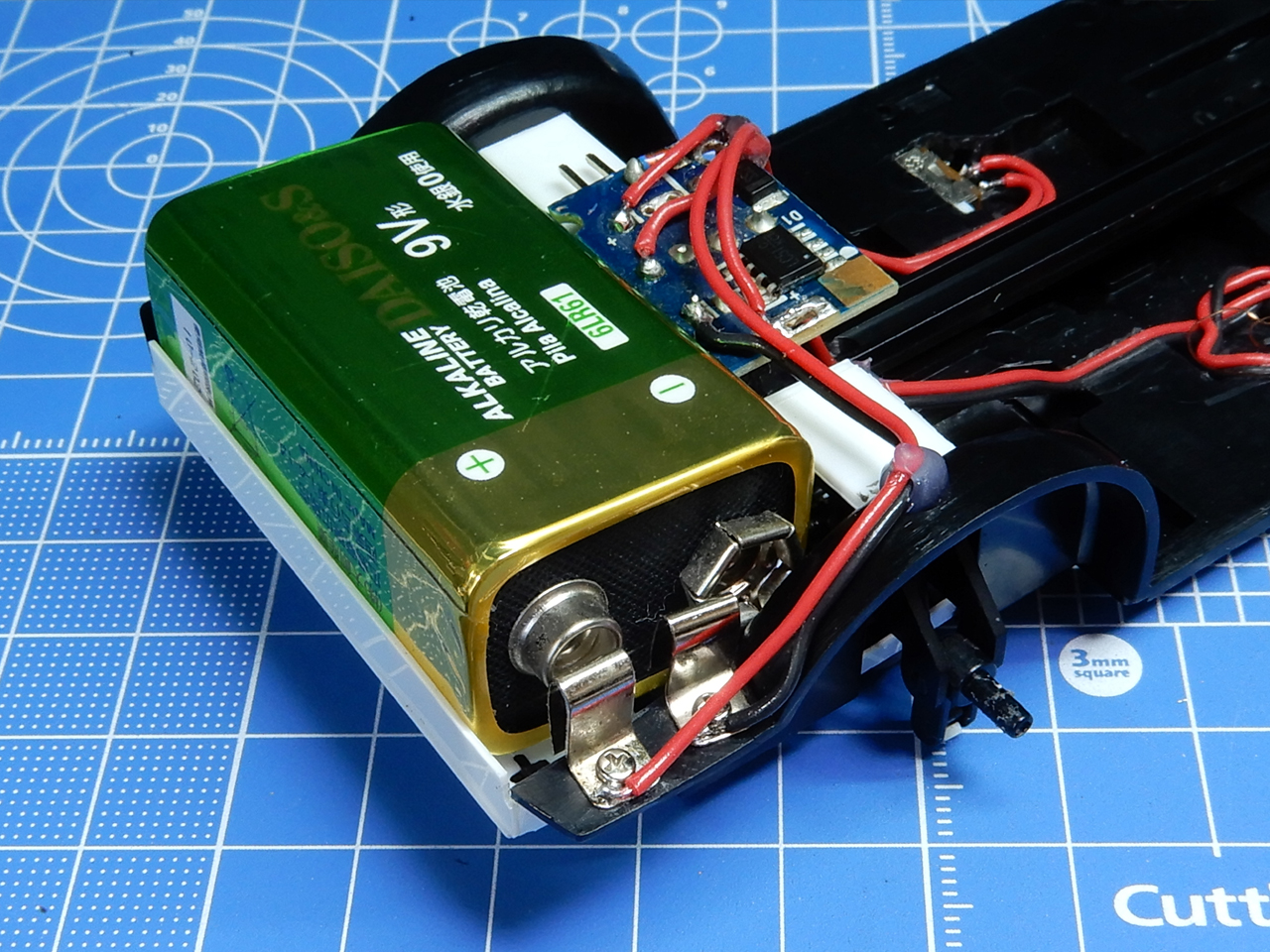
電池の接点部分です。
シガーライターUSBアダプタを分解した時に余る、バネになる金属を使って電池の接点を作りました。
電池をハメ込んだ時に、ちょうど良いテンションになる様に調節して、M1.4のビスで固定しています。
タイヤボックスのおかげでマイナス端子の位置がずれてしまいましたが、電気的には問題ありませんので、ま、いっか。
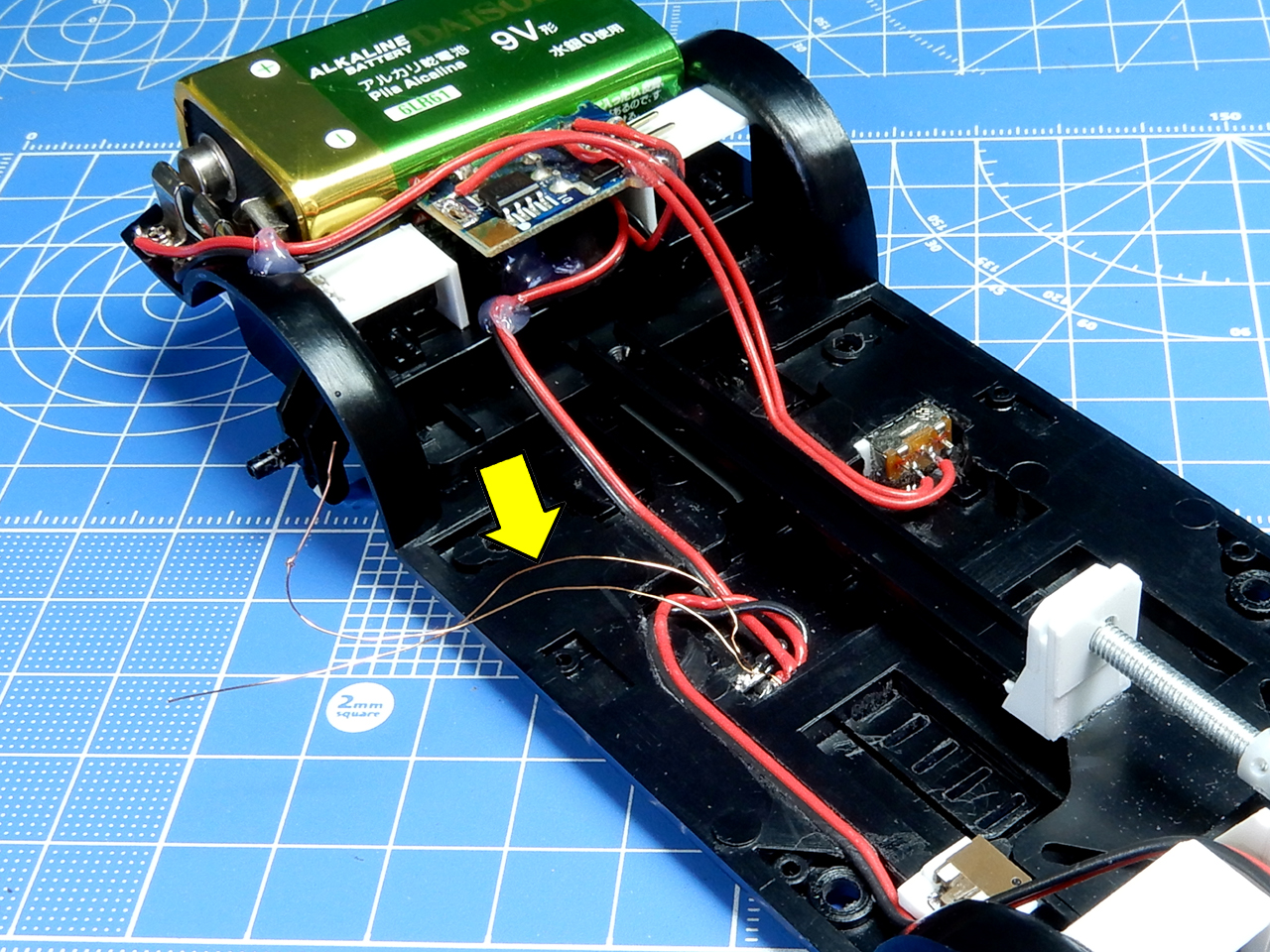
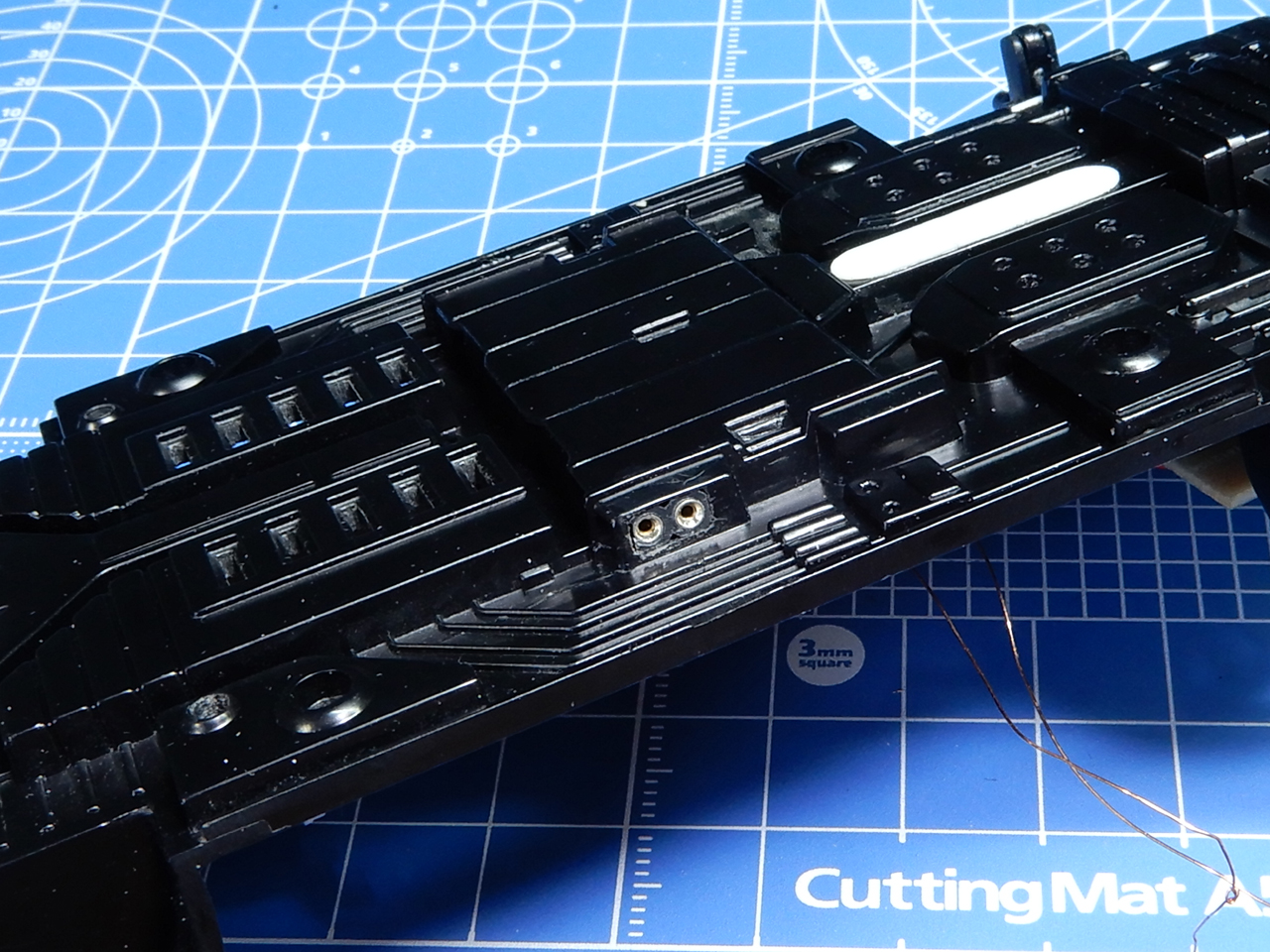
電源はシャーシ側だけではありません。
ボディー側も電飾します(むしろコッチが重要)ので、電源を引き出す端子を作っておきました。
まだじぇんじぇん作っていませんけど、ここから2Pのソケットで5Vを供給します。
配線は埋めています。
ここはすぐ上に密着して内装パーツが乗るので、配線は溝を彫って埋め、ツライチになる様にしています。
また、まだシャーシ側にも電源が必要な部分が残っていますので、ポリウレタン線で電源を引き出して置きました。
これでリア部分もパンパンです。
このすぐ上にメカが乗るボードが乗りますが、ホントにギリギリです。
まだ追加したい回路があるのに、本当に収まるのか不安しかありません。
だいぶ長くなってしまったので、ここで一旦区切ります。
次回もシャーシ部分の加工の続きになります。
よろしくお付き合い下さい。
電飾する模型を作る時は、まず最初に電源をどうするか決めなくてはなりません。
それによって、LEDの数に制限が出来たり、LEDを抵抗で保護するのか、CRDを使うのか、回路の設計だって違ってきます。
途中まで進んでしまってから電源が変わってしまうと、最初から設計をやり直さなくてはならなくなります。
今回は飛行状態の電動化が出来るのか、やってみなくちゃ判らなかったので、そこから手を付けていますが、本当は電源を決めてから着手する工作です。
幸い、上手く動いてくれたので、電源は5Vに決定です。
5VならUSB端子を作れば簡単に電源を確保できますが、常にケーブルが刺さったデロリアンでは、ちょっとカッコ悪いですよね。
そこで、電池を内蔵させる事にしました。

電池は5V以上で大きい方がありがたいので、9Vの角型電池にしました。
モバイルバッテリーを分解して仕込むことも検討しましたが、サイズと容量から断念しています。
キットのリア部分をカットして、プラ板で箱を作り、電池が収まるスペースを作りました。
飛行状態へのギミックをフロント部分へギュウギュウに詰め込んで、リア部分には一切手を出さなかったのは、この電池を仕込むスペースを取って置きたかったからです。
電池は9Vなので、マイコンやモーターで使う5Vにコンバートしなくてはなりません。

百円ショップの、車用シガーライターソケットからUSB電源を取り出すアダプタを使います。
ちゃんとしたスイッチング電源なので、3端子レギュレーターの様な発熱がありませんので、ボクは良く使わせてもらっています。
でも、これでもちょっと大きいので、USBコネクタやLEDを外したり、基板をカットして更に小さくしました。

約2cmまで小さくなりました。
こんなに小さくても、12Vや9Vから安定した5V/1Aを作ってくれます。
スイッチング式は必要な電力分しか変換しないため、電池の持ちも良くなります。
この電圧コンバータを取り付けてみました。
リアの僅かな空間に、逆さまにして取り付けています。
電源スイッチは、車体下の窪んだ部分を利用して、スライドスイッチを取り付けています。
なんでこんな操作しにくい場所に仕込んだのかは、後で説明しますね。
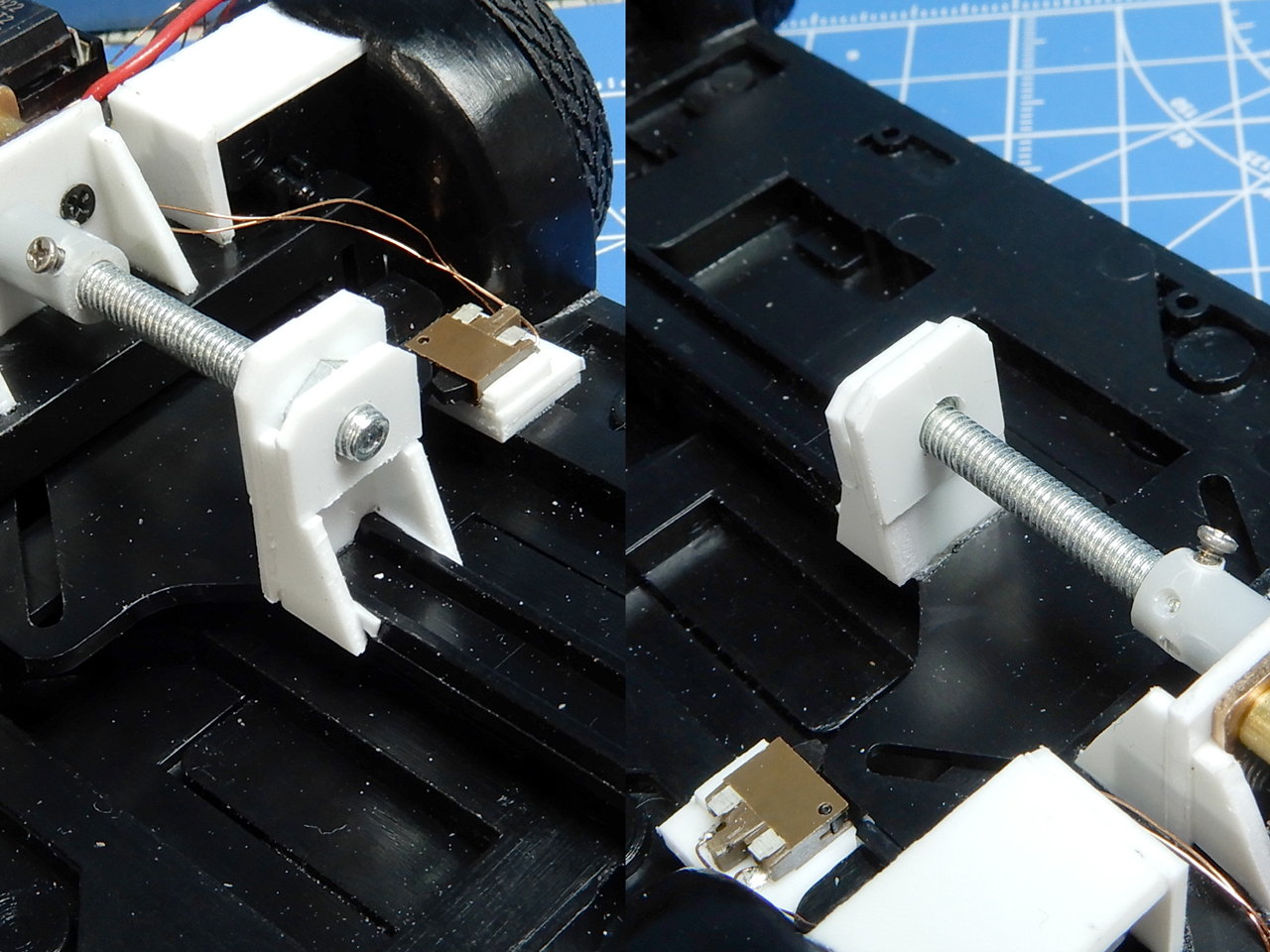
電池の接点部分です。
シガーライターUSBアダプタを分解した時に余る、バネになる金属を使って電池の接点を作りました。
電池をハメ込んだ時に、ちょうど良いテンションになる様に調節して、M1.4のビスで固定しています。
タイヤボックスのおかげでマイナス端子の位置がずれてしまいましたが、電気的には問題ありませんので、ま、いっか。
電源はシャーシ側だけではありません。
ボディー側も電飾します(むしろコッチが重要)ので、電源を引き出す端子を作っておきました。
まだじぇんじぇん作っていませんけど、ここから2Pのソケットで5Vを供給します。
配線は埋めています。
ここはすぐ上に密着して内装パーツが乗るので、配線は溝を彫って埋め、ツライチになる様にしています。
また、まだシャーシ側にも電源が必要な部分が残っていますので、ポリウレタン線で電源を引き出して置きました。
これでリア部分もパンパンです。

このすぐ上にメカが乗るボードが乗りますが、ホントにギリギリです。
まだ追加したい回路があるのに、本当に収まるのか不安しかありません。
だいぶ長くなってしまったので、ここで一旦区切ります。
次回もシャーシ部分の加工の続きになります。
よろしくお付き合い下さい。
2021-04-10 23:38
コメント(6)
USB電源 [デロリアン製作記]
電池以外の電源として、USBからも供給可能にします。
シャーシ部分の改造は、まだ続きます。
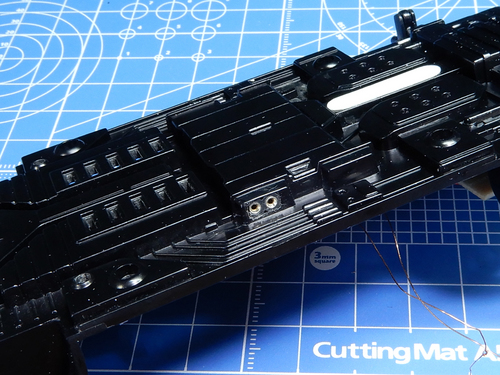
下面の発光部分を開口しました。
下部には、丸く発行する部分が6箇所ありますので開口しました。
大きな丸穴はちょうど3mmなので、砲弾型LEDを直接差し込むだけでOKです。
発光面がレンズ状に湾曲しているので、面倒臭そうだなーと思っていたのですが、簡単工作で済んでラッキーです。
でも、小さな丸穴はそうは行かないので、何か工夫が必要になりそうですね。
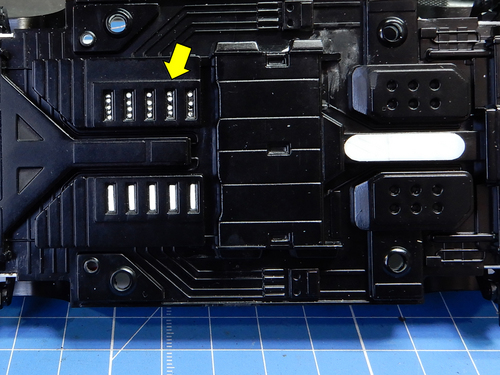
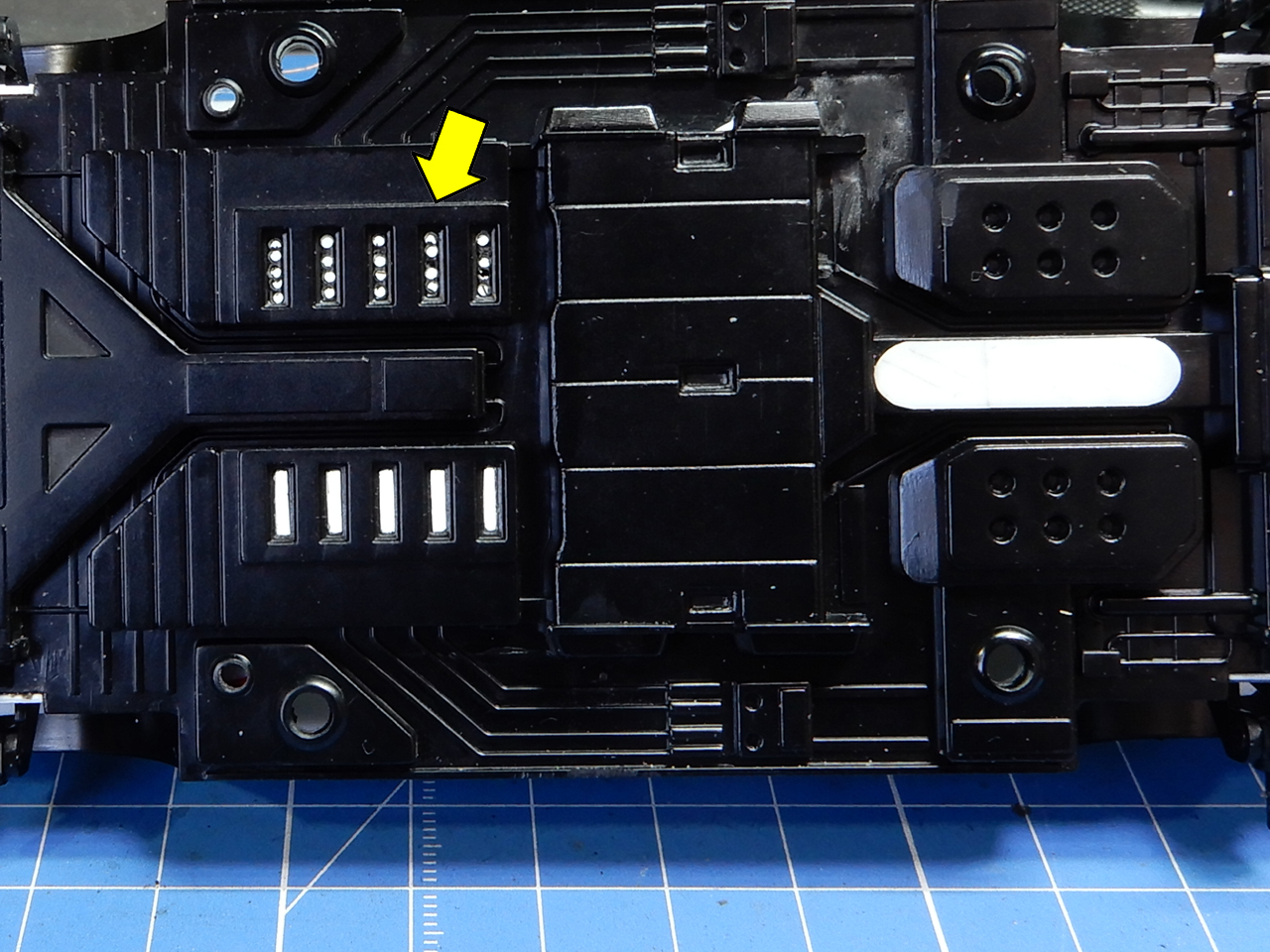
それと、5本のスリット×2列も開口しました。
0.8mmのドリルでたくさん穴を開けて、デザインナイフで繋いでいく方法で開口しました(画像は開口の途中)
ここは前方から後方へ順番に緑色で発光する部分です。
シーンによって移動速度が違っていますが、面倒臭いので適当な速度で光が移動する様にプログラムします。
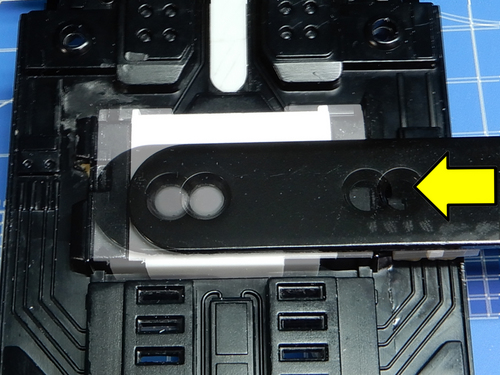
右のオーバル型のプラ板は、手動で車輪を飛行状態にするためのノッチが付いていた部分です。
モーターライズ化しましたので、プラ板で塞いでしまいました。
さて、前回電池で電源を確保しましたが、展示会などで電池が切れたらOUTです。
特に今回は大電流食らいのモーターを動かしますから、9V電池といえど不安があります。
そこで、USBからも給電できるようにしておきます。
USBなら、コンセントからUSB充電できるアダプタが使えますし、モバイルバッテリーでも対応できますので、どんな場所でも大丈夫です。
コネクタは、車体下の突起部分を利用して、横向きにピンソケットを埋め込みました。
デロリアンは左ハンドルなので、左側を向けて展示する事が多いと思われますから、コネクタは目立たない車体の右側に配置しています。
ここにUSB電源からピンコネクタに変換した5Vを挿して給電できます。
USB端子ではなく、ピンソケットにしたのは、この後工作する支柱を取り付ける時に、スムーズに接続出来るようにするためです。
電源を電池とUSBのハイブリッド化したのは良いのですが、回路的には困った問題が起こります。
同じ5Vとはいえ、電圧に僅かな違いがあれば、電気が低い方へと流れてしまい、回路が安定して動かなくなる可能性があります。
そこで、両方の5Vの出力にダイオードを入れておきます。
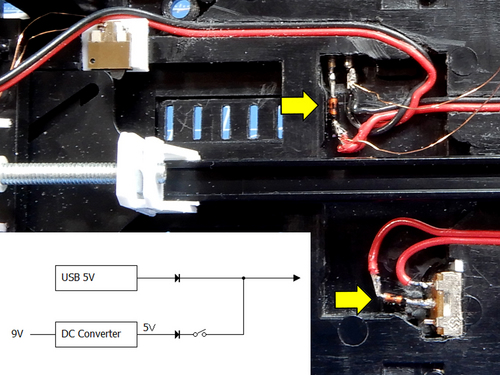
ダイオードは、電気を一方向にしか流さない半導体素子で、小さなガラス管に入ったパーツです。
ちなみに、LEDも発光ダイオードと、ダイオードの一種なので、+-を逆に繋ぐと電気が流れず発光しません。
これで5Vは電源から出てくるけど逆流はしませんので、どちらの電源でも、同時につないでも大丈夫になります。
ただ、ダイオードを通すと0.7V程度低下してしまいますので、回路で使う電圧は4.3Vになります。
また、ダイオードを追加したからといって、そのまま接続しておくのはやはり不安です。
USB電源を使う時は、電池からのスイッチを切る工作をしておきます。
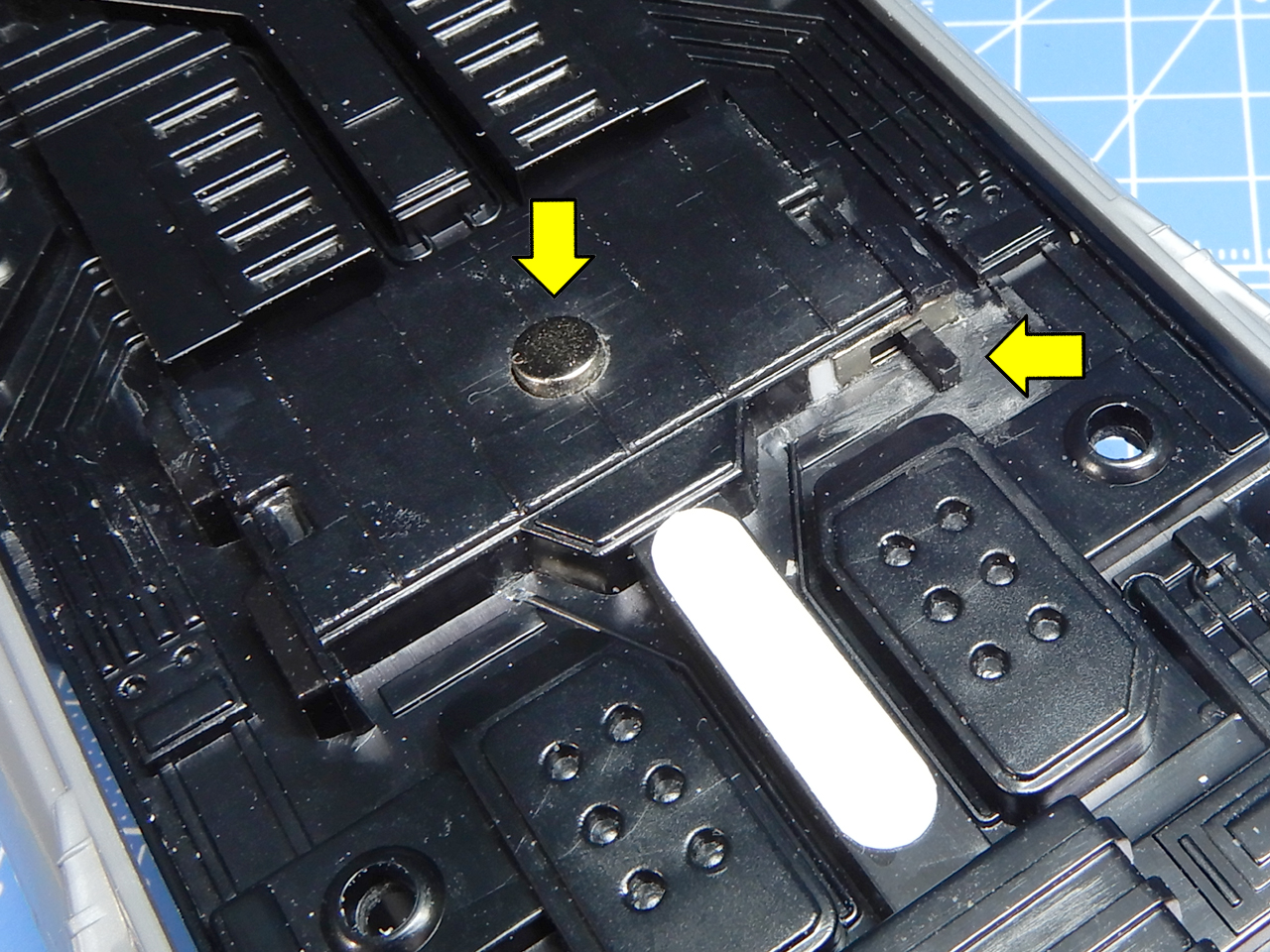
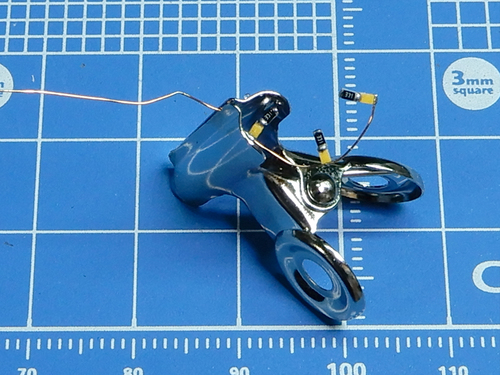
デロリアンを中に浮いている感じで支える支柱を準備します。
デロリアンを、浮かせた状態で展示できるように支柱を付けたいのですが、下から棒を差すのはカッコ悪いですし、横から支えるためにボディーに穴を開けるのもイヤです。
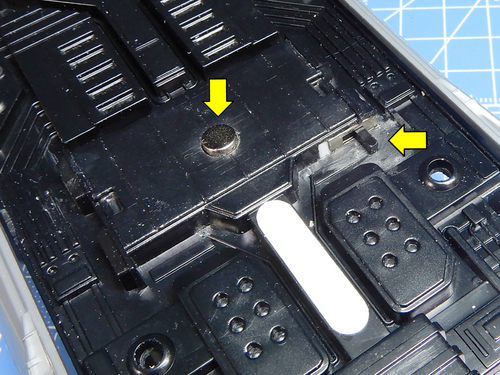
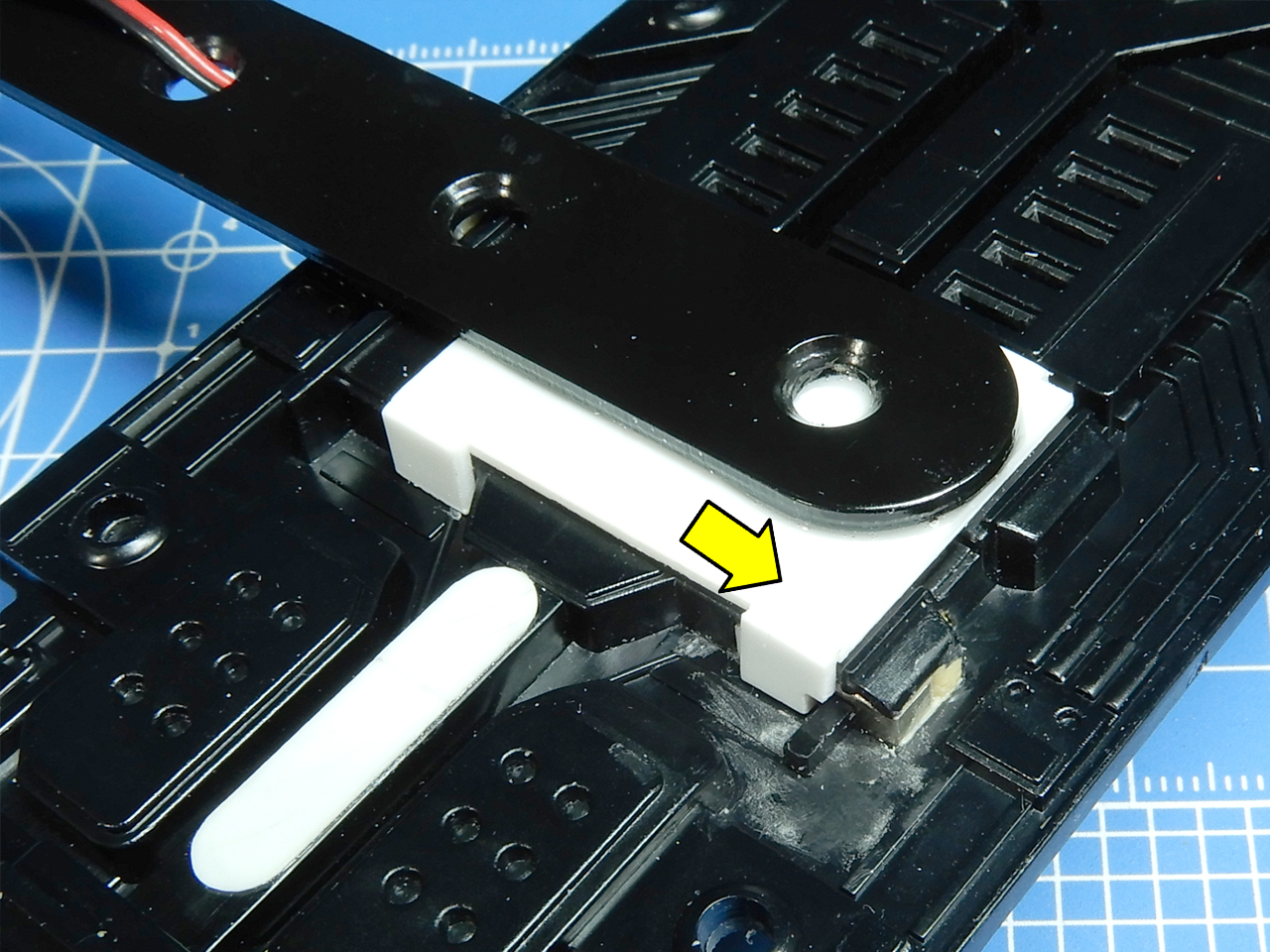
そこで、金属のアングルに乗せ、車体中央付近に取り付けた磁石で固定する方法にしました。
しかも、取り付けるとベースからUSBの電源ソケットへピンが繋がって、電源が電池からUSB電源に切り替わり、右矢印の電池の電源スイッチを切ってくれる仕組みにします。
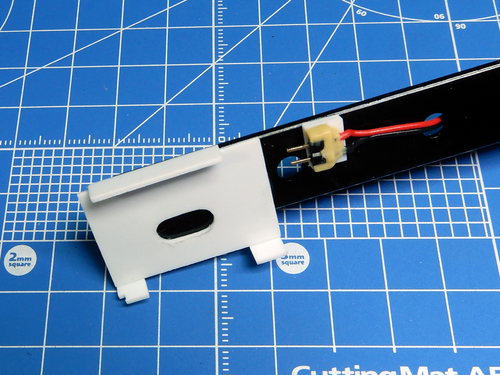
支柱の金属アングルには、キットの形状に合わせて位置がズレない様にするサポートを付けました。
オーバル型の穴に磁石が収まり、金属アングルに直接磁石で固定されます。
乗せてからスライドすると、USB電源のピンコネクタが接続されるわけです。
そしてこのとき、電池からの電源スイッチが押されて、OFFになります。
一度乗せてからスライドさせる操作が必要になりますが、支柱に取り付けるだけで電池電源からUSB電源へと切り替わり、空中に浮いているような状態で展示できるというワケです。
電源スイッチを、なんでこんな操作しにくい場所につけたのか、その理由がコレでした。
磁石は金属アングルに直接付いていますし、サポート板が広い面積で支持してくれますので、浮遊状態でもしっかり支えてくれます。

これで電源周りの工作が終了しました。
やっと電飾部分の工作に移れます。
シャーシ部分の改造は、まだ続きます。
下面の発光部分を開口しました。
下部には、丸く発行する部分が6箇所ありますので開口しました。
大きな丸穴はちょうど3mmなので、砲弾型LEDを直接差し込むだけでOKです。
発光面がレンズ状に湾曲しているので、面倒臭そうだなーと思っていたのですが、簡単工作で済んでラッキーです。
でも、小さな丸穴はそうは行かないので、何か工夫が必要になりそうですね。
それと、5本のスリット×2列も開口しました。
0.8mmのドリルでたくさん穴を開けて、デザインナイフで繋いでいく方法で開口しました(画像は開口の途中)
ここは前方から後方へ順番に緑色で発光する部分です。
シーンによって移動速度が違っていますが、
右のオーバル型のプラ板は、手動で車輪を飛行状態にするためのノッチが付いていた部分です。
モーターライズ化しましたので、プラ板で塞いでしまいました。
さて、前回電池で電源を確保しましたが、展示会などで電池が切れたらOUTです。
特に今回は大電流食らいのモーターを動かしますから、9V電池といえど不安があります。
そこで、USBからも給電できるようにしておきます。
USBなら、コンセントからUSB充電できるアダプタが使えますし、モバイルバッテリーでも対応できますので、どんな場所でも大丈夫です。
コネクタは、車体下の突起部分を利用して、横向きにピンソケットを埋め込みました。
デロリアンは左ハンドルなので、左側を向けて展示する事が多いと思われますから、コネクタは目立たない車体の右側に配置しています。
ここにUSB電源からピンコネクタに変換した5Vを挿して給電できます。
USB端子ではなく、ピンソケットにしたのは、この後工作する支柱を取り付ける時に、スムーズに接続出来るようにするためです。
電源を電池とUSBのハイブリッド化したのは良いのですが、回路的には困った問題が起こります。
同じ5Vとはいえ、電圧に僅かな違いがあれば、電気が低い方へと流れてしまい、回路が安定して動かなくなる可能性があります。
そこで、両方の5Vの出力にダイオードを入れておきます。

ダイオードは、電気を一方向にしか流さない半導体素子で、小さなガラス管に入ったパーツです。
ちなみに、LEDも発光ダイオードと、ダイオードの一種なので、+-を逆に繋ぐと電気が流れず発光しません。
これで5Vは電源から出てくるけど逆流はしませんので、どちらの電源でも、同時につないでも大丈夫になります。
ただ、ダイオードを通すと0.7V程度低下してしまいますので、回路で使う電圧は4.3Vになります。
また、ダイオードを追加したからといって、そのまま接続しておくのはやはり不安です。
USB電源を使う時は、電池からのスイッチを切る工作をしておきます。
デロリアンを中に浮いている感じで支える支柱を準備します。
デロリアンを、浮かせた状態で展示できるように支柱を付けたいのですが、下から棒を差すのはカッコ悪いですし、横から支えるためにボディーに穴を開けるのもイヤです。
そこで、金属のアングルに乗せ、車体中央付近に取り付けた磁石で固定する方法にしました。
しかも、取り付けるとベースからUSBの電源ソケットへピンが繋がって、電源が電池からUSB電源に切り替わり、右矢印の電池の電源スイッチを切ってくれる仕組みにします。

支柱の金属アングルには、キットの形状に合わせて位置がズレない様にするサポートを付けました。
オーバル型の穴に磁石が収まり、金属アングルに直接磁石で固定されます。
乗せてからスライドすると、USB電源のピンコネクタが接続されるわけです。

そしてこのとき、電池からの電源スイッチが押されて、OFFになります。
一度乗せてからスライドさせる操作が必要になりますが、支柱に取り付けるだけで電池電源からUSB電源へと切り替わり、空中に浮いているような状態で展示できるというワケです。
電源スイッチを、なんでこんな操作しにくい場所につけたのか、その理由がコレでした。
磁石は金属アングルに直接付いていますし、サポート板が広い面積で支持してくれますので、浮遊状態でもしっかり支えてくれます。

これで電源周りの工作が終了しました。
やっと電飾部分の工作に移れます。
2021-04-11 16:51
コメント(4)
下面の電飾 [デロリアン製作記]
やっと電飾に入りました^^
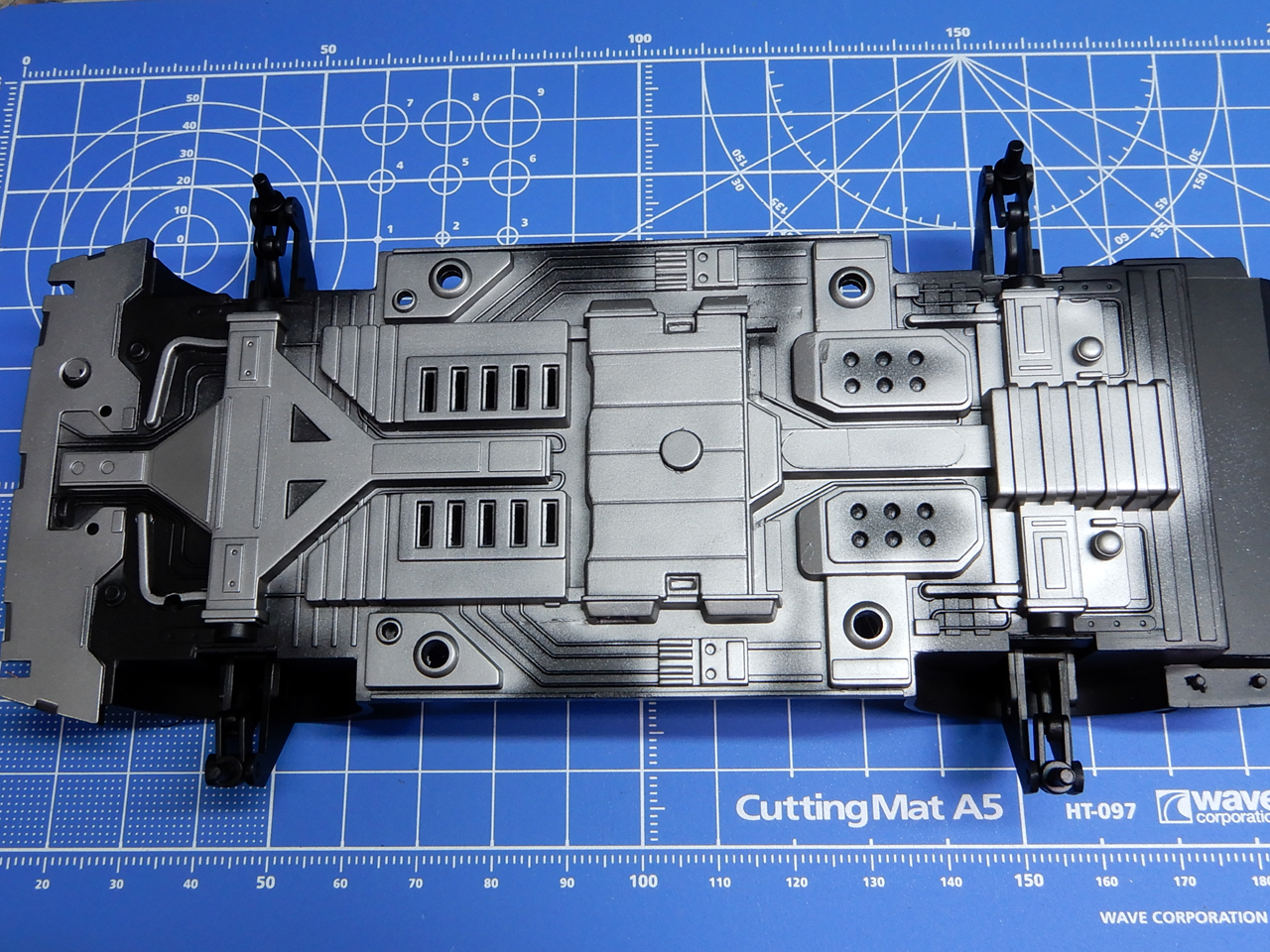
LEDを組み込む穴を開口しましたので、まずは下面を塗装します。
電飾作品を作る場合は、塗装してからLEDを組み込む場合や、LEDを組み込んでから塗装する場合と、作業内容によって手順がコロコロ変わります。
下面は盛り上がっている部分をシルバーで塗装しますが、塗り分ける形状がとても複雑な形をしていて、黒を塗ってからシルバーを塗るとマスキングが大変そうです。
今回はシルバーを塗ってからブラックで塗装する事にしました。
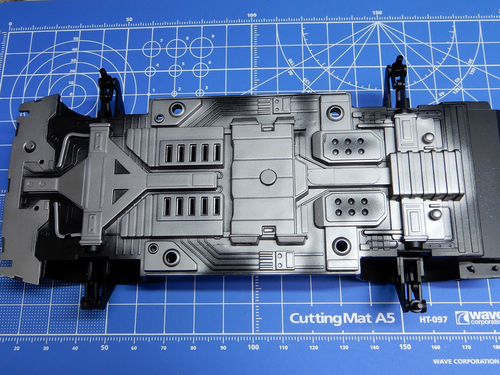
シルバーを塗装しました。
盛り上がっている部分を、横になっている面も含めて塗装しています。
映画を観ると、そんなにギラギラしていない感じだったので、8番シルバーに光沢ブラックを半分近く混ぜ、グレーの様な暗いシルバーにしました。
次に、ブラックを塗装します。
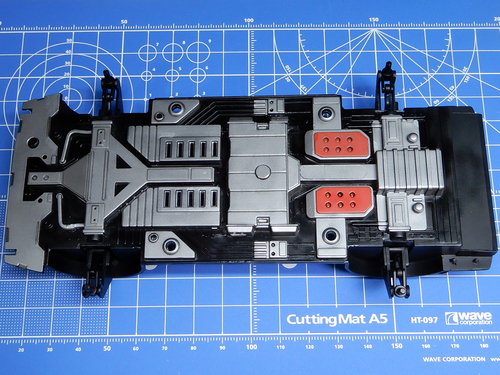
100均の紙ばんそうこうで部分的にマスキングしながら、つや消しブラックで少しずつ塗り分けています。
溝の深い部分が多くあり、ブラックを塗ってからシルバーを塗っていたら、多分大変だったと思います。
赤い部分は映画では真っ赤な感じには見えなかったので、トーンを落として朱色に振りました。
裏側で暗く見える分、明るくして劇中の赤に近づける発色にしています。
最後にエナメルのフラットブラックでスミ入れしてメリハリを付けて、つや消しでトップコートです。
ツヤを消してしまうことで、鈍く光る鋳物(イモノ)っぽさを出しました。
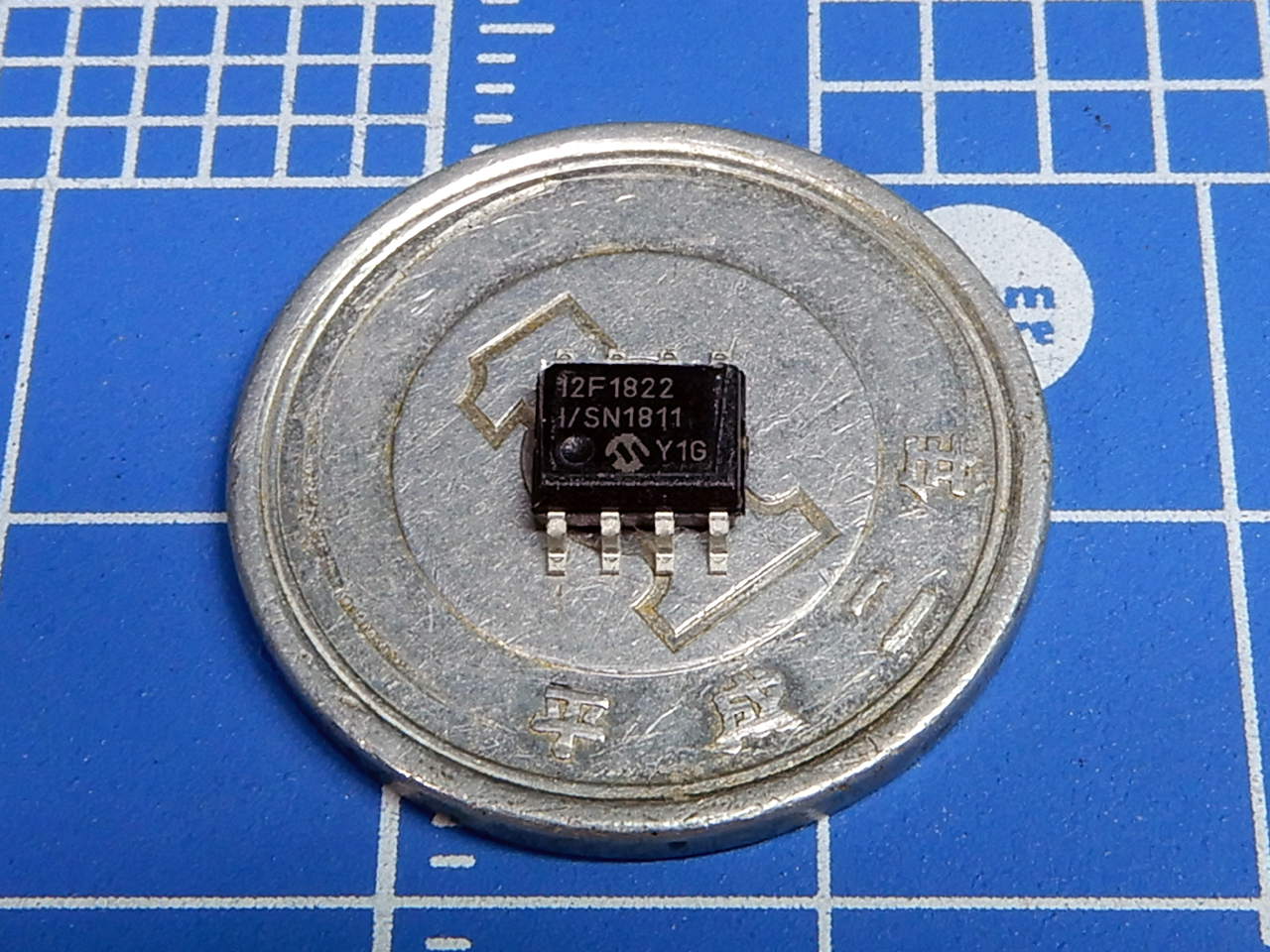
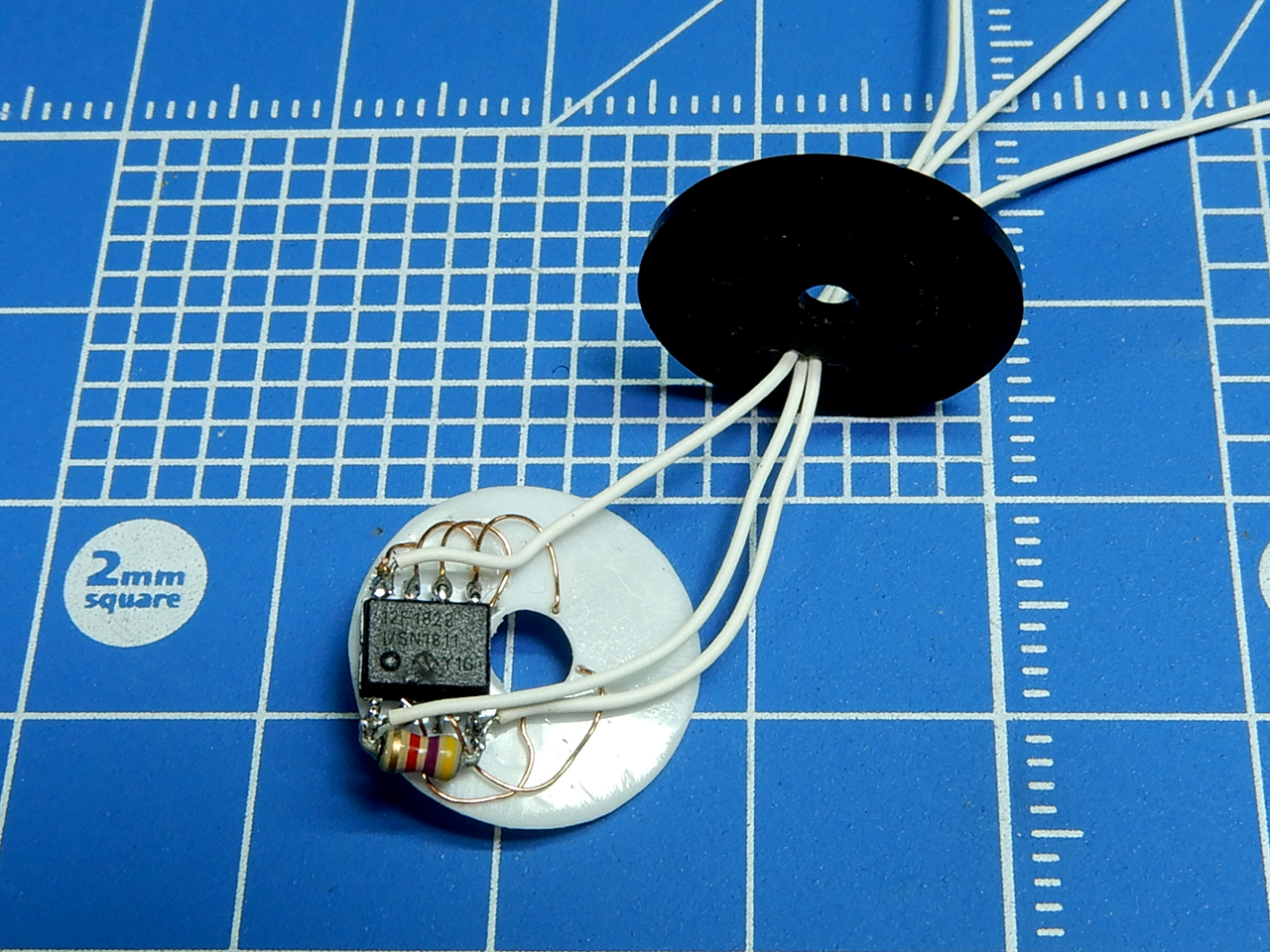
電飾には、極小のマイコンを使います。
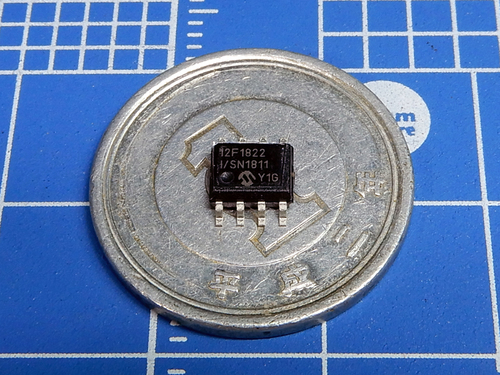
モーター制御でも使ったマイコン、12F1822のSOPパッケージ版を使います。
1円玉に余裕で乗ってしまうサイズで、今回の様に工作スペースが狭い部分にマイコンを仕込む際に、とても便利です。
小さくても元の12F1822と性能は一緒で、1本の入力専用端子と5本の入出力端子を持ちます。
これなら、デロリアンの窪んだところに余裕で収まりそうです。
プログラミングは通常の大きさの12F1822で行います。

通常サイズの12F1822と全く同じですから、ブレッドボードで試作や開発を行い、プログラムが完成したら、書き込む時だけSOPパッケージに取替えます。
ただ、端子のサイズや幅が全然違いますので、通称「ゲタ」と呼ばれるアダプタで変換して書き込みます。
このゲタはちょっとお高いのですが、これがないとプログラムが書きこめないので、ガンガン使って元を取っています。
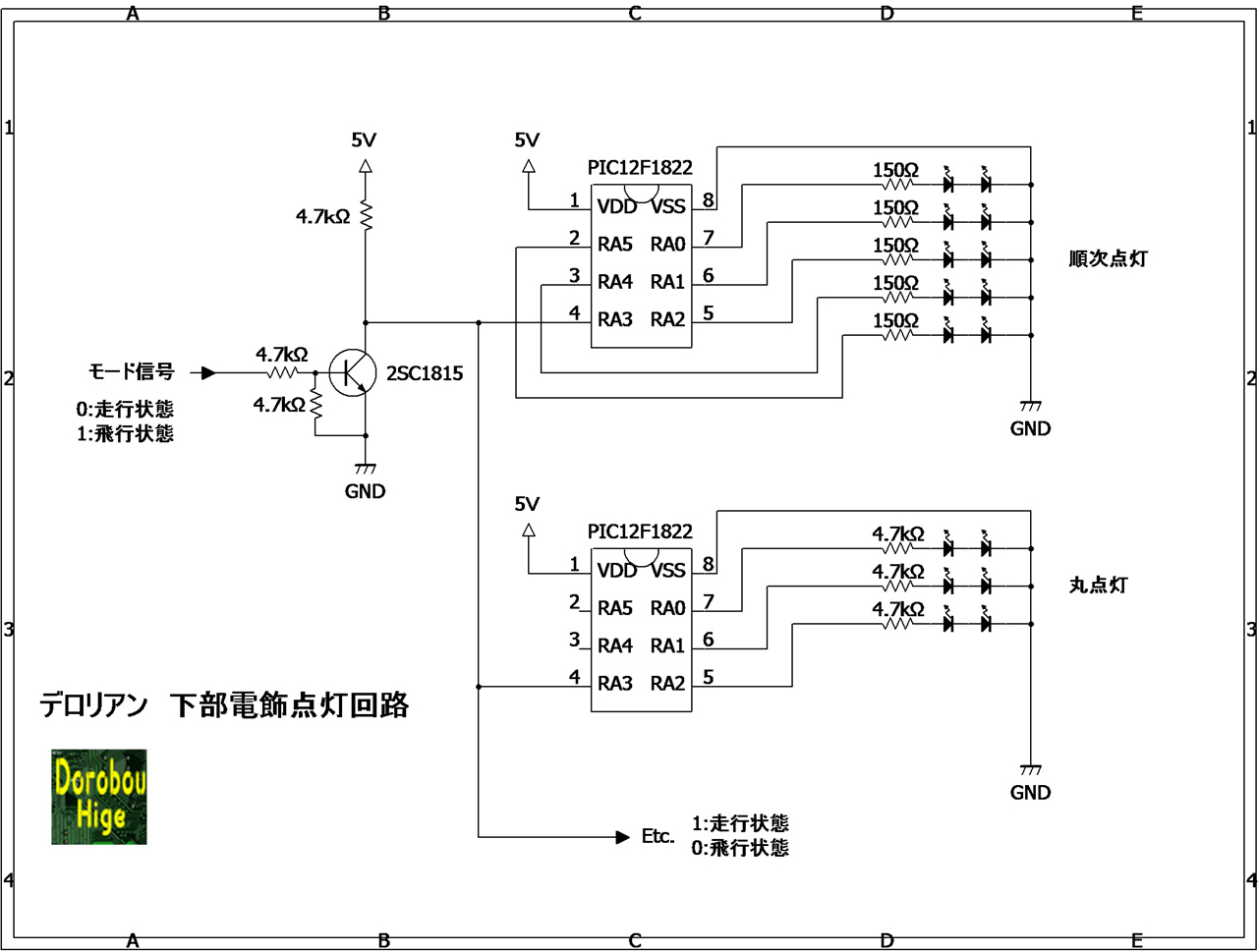
下面を電飾する回路図です。
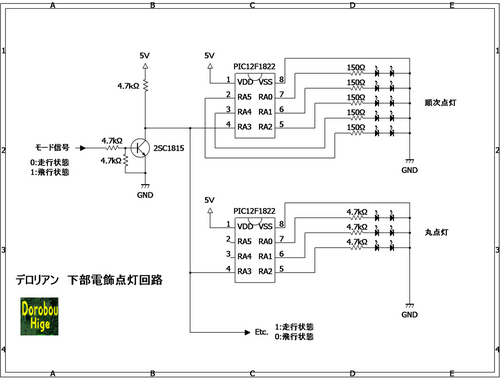
6個の丸く光る部分と、5個×2列の順送りで光る部分で、2個のマイコンを使います。
丸く光る部分は単純にパッと光るだけでも良かったのですが、雰囲気を出したくてフワッと点灯して、スッと消えるアクションを付けてみます。
順送りの発光も、ただ順番に点灯するより、劇中の様に残光を残しながら点灯した方が良いでしょう。
ドクも、「どうせ作るなら、カッコいい方がええじゃろ!」と言っていましたし。
LEDは、配線の節約のために、2個を直列で繋いで、PICの出力5Vで2個を点灯させています。
丸点灯の方が、スリットから光が出てくる順送り発光より明るくなるはずですので、抵抗値を上げて暗くして、見た目で同じ明るさで点灯する様に調整しました。
2つのPICは、モーター制御PICからのモード信号で動き出します。
通常状態の時は0(0V)で、飛行状態になると1(5V)の信号が来ますので、飛行状態の時だけ発光する様にプログラムします。
モード信号は、一度トランジスタでスイッチングされて、モード信号が0の時は1、モード信号が1の時は0と、信号が逆転します。
実は、始めはモード信号をそのまま使って動作させたのですが、電源を入れるたびに不安定な動きになりました。
電源を入れるたびに、走行状態なのに発光したりしなかったり、飛行状態なのに光らなかったり、挙動不審な動きをしたのです。
どうやら、モーター制御PICが信号を出す前に電飾PICが信号を読みに行ってしまい、モードを勘違いしてしまうらしいです。
そこで、トランジスタでスイッチング回路を作って、電源ONでPICより先に5Vが立ち上がる回路を追加したワケです。
これでウソの様に安定してくれました。
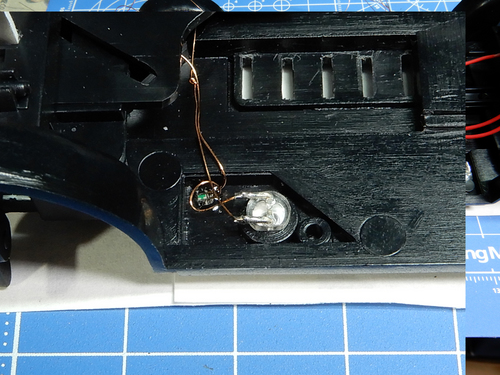
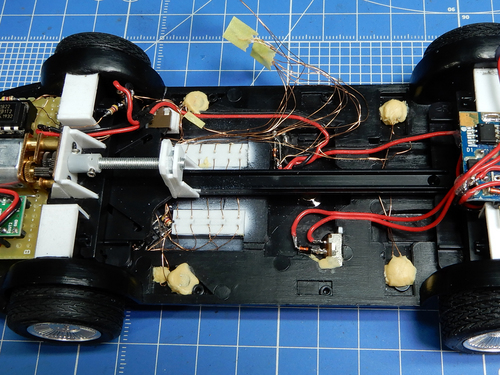
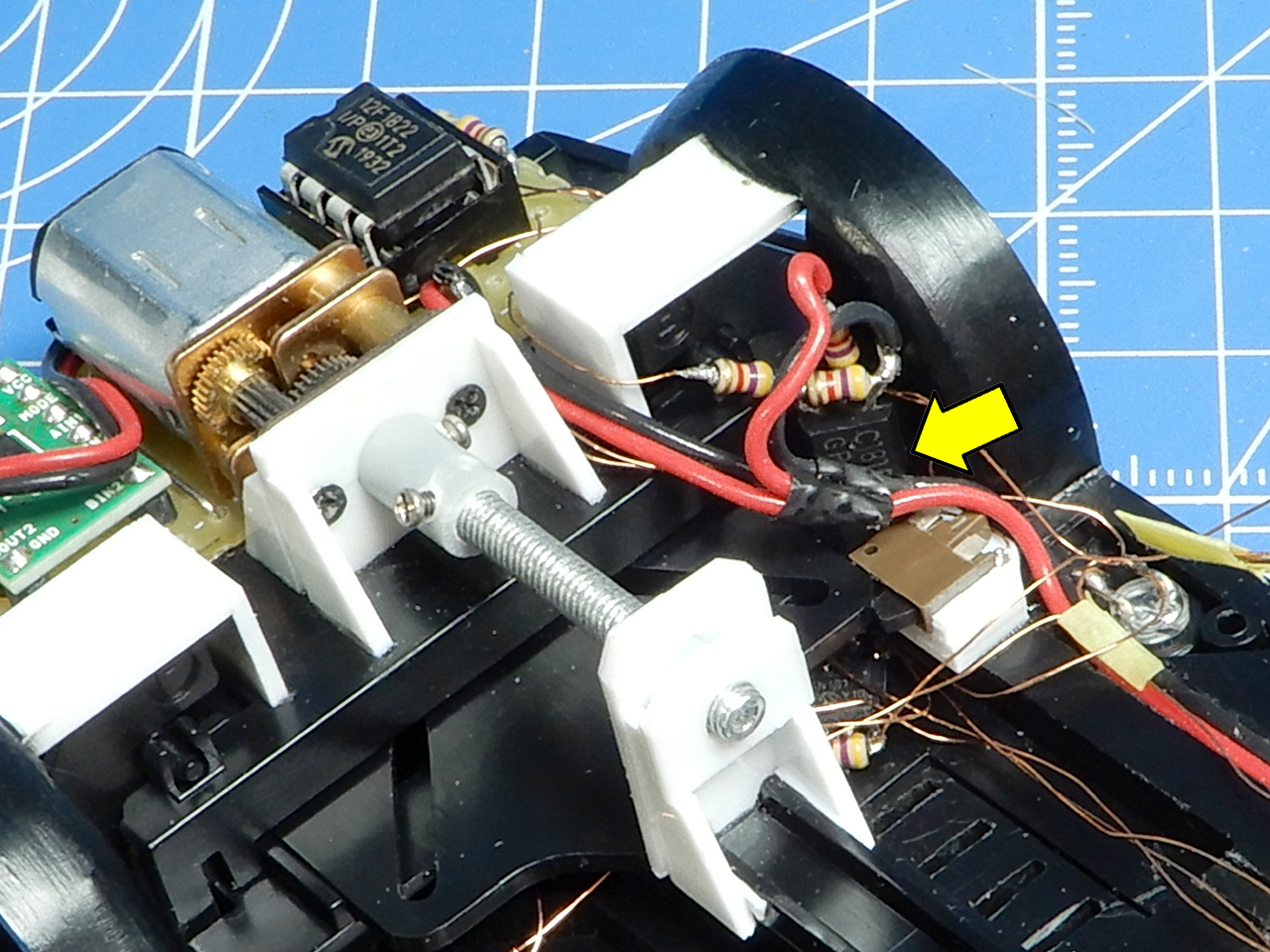
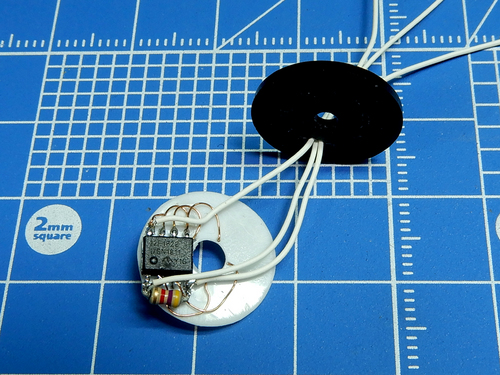
トランジスタは、空中配線です。
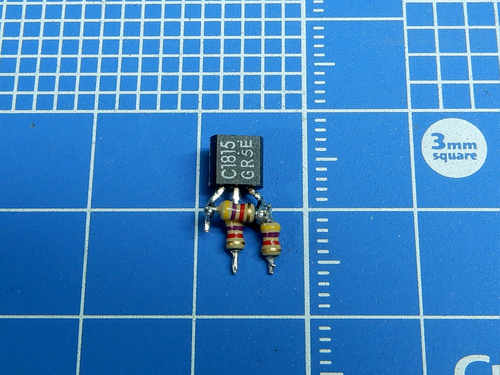
予想外のトラブルで、余計な回路を仕込む余裕はありませんので、トランジスタと周辺の抵抗類は空中配線で組み立てました。
これを前輪と内装のスキマに押し込みます。
頭を下にして、逆さまに固定しています。
左側の、抵抗の先に繋がっている細い線がモード信号の配線です。
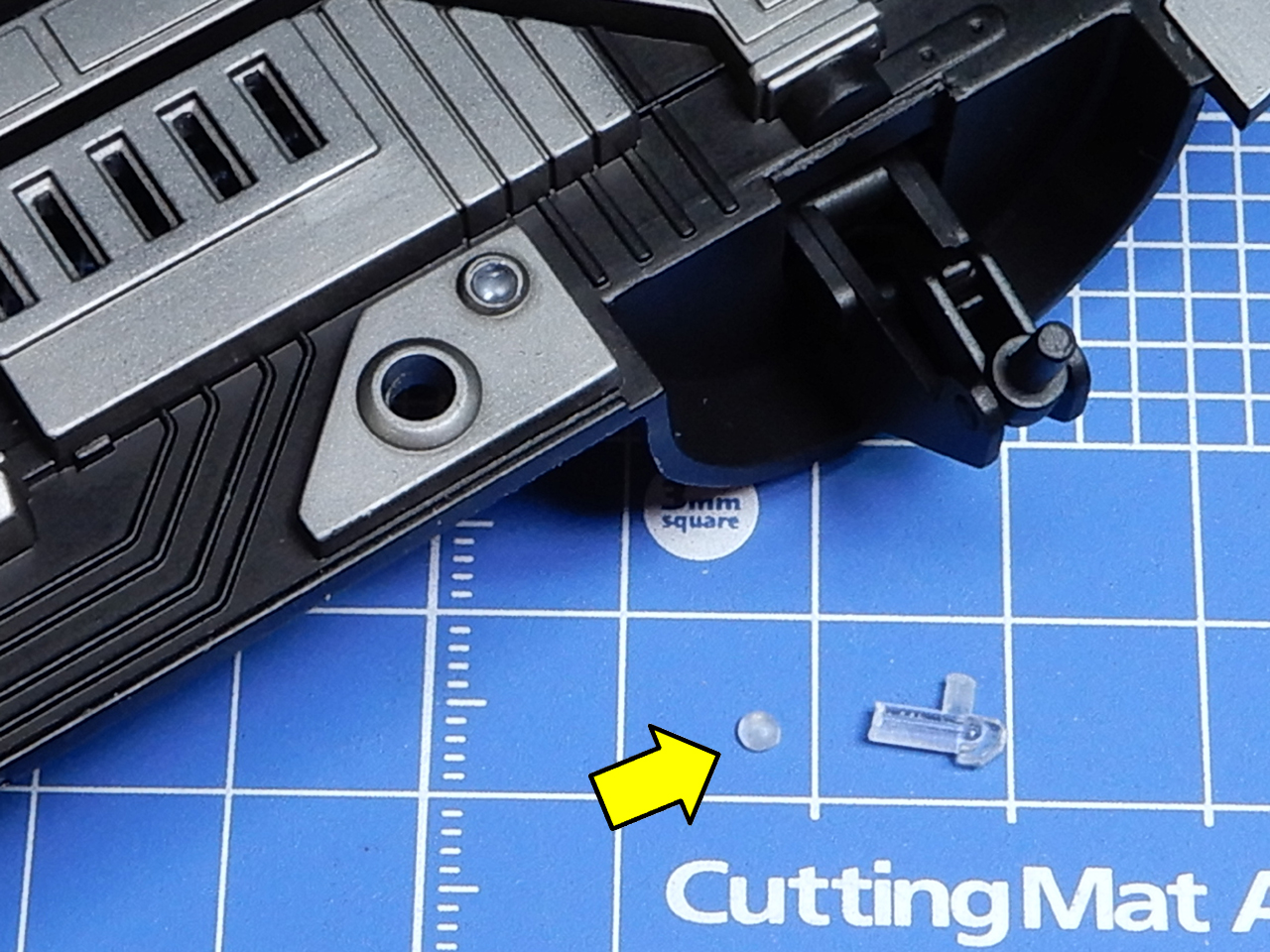
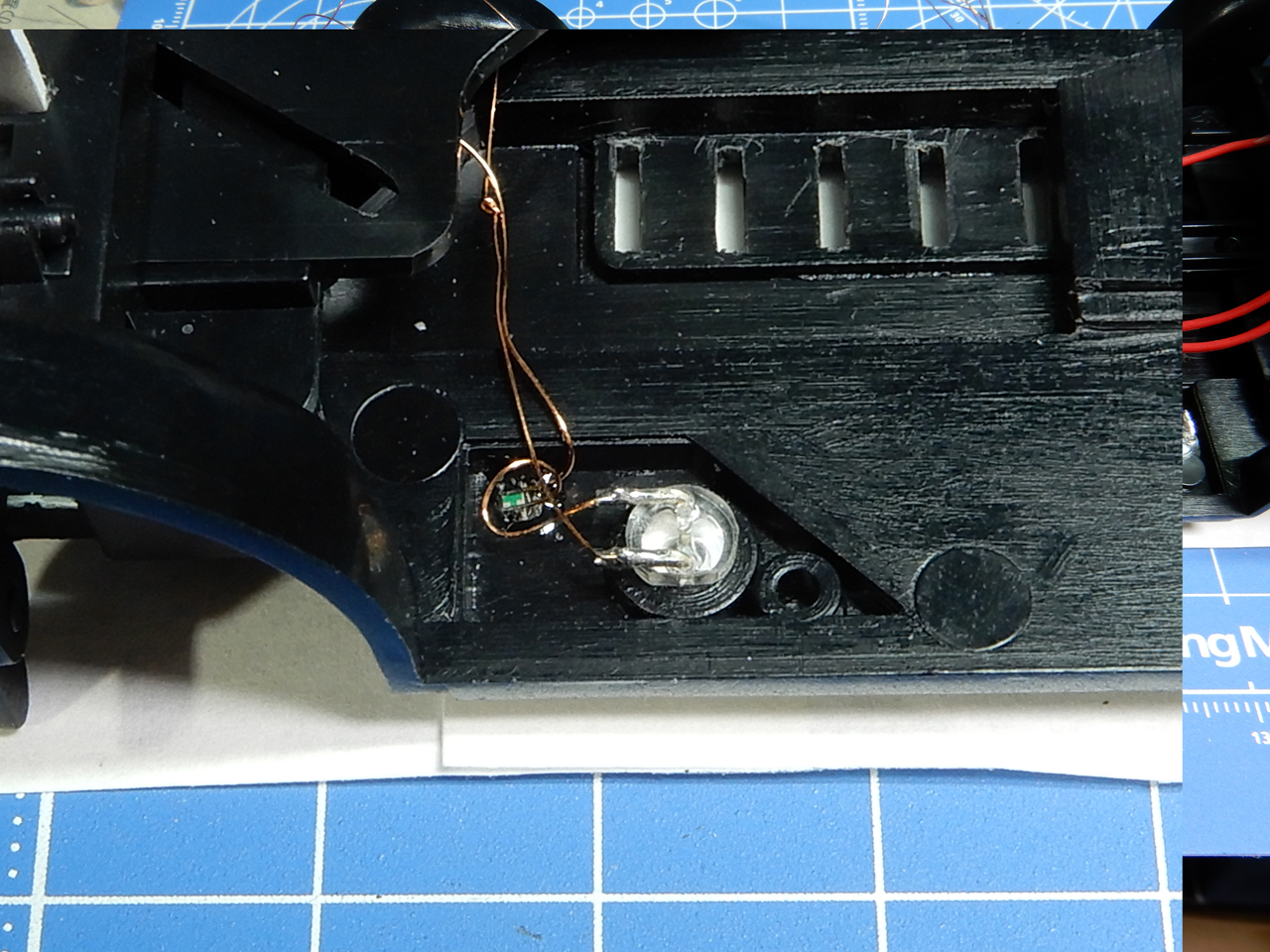
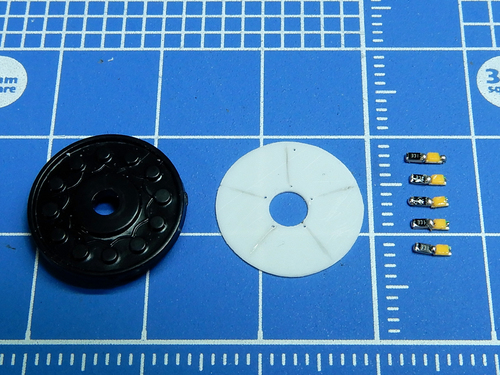
小さい丸穴のレンズを自作しました。
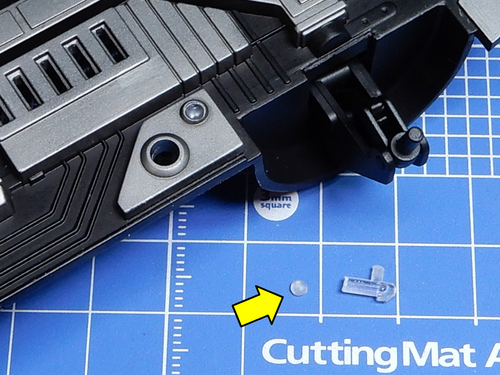
大きい丸穴は3mmLEDをそのまま挿せばOKですが、小さい丸穴は約2.5mmと小さいです。
透明なランナーの先をヤスって丸めてからカットして、レンズを作ってハメ込みました。
裏にチップLEDを埋めます。
裏に出来たくぼみの中に1608(1.6mm×0.8mm)LEDを置いて、透明なエポキシ接着剤で固定しました。
すぐとなりの3mm砲弾型LEDと直列でつないでPICへ接続します。
順送り部分は仕切り板を作って光を閉じ込めます。
0.5mmのプラ板で仕切りを作って、LEDの光が1つのスリットだけ発光させる部屋を作ります。
プラ板から光が漏れてしまったら台無しなので、ブラックで完全に遮光してから、反射率の良い白で塗装して、箱の内部で光を拡散させます。
スリット全体が均一に光り、LEDの光点だけ明るく光ってしまうのを防ぐためです。
ちなみに、シルバーは若干ですが反射した色が変わるので、わざわざ黒と白の2色を使っています。
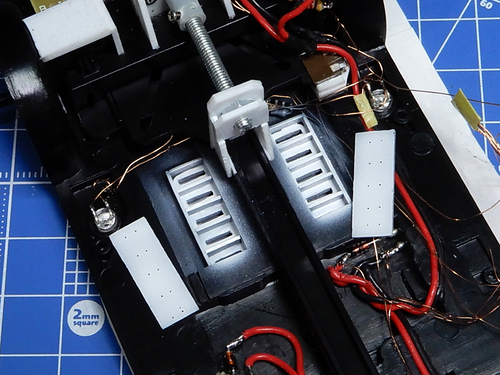
LEDとPICを取り付けました。
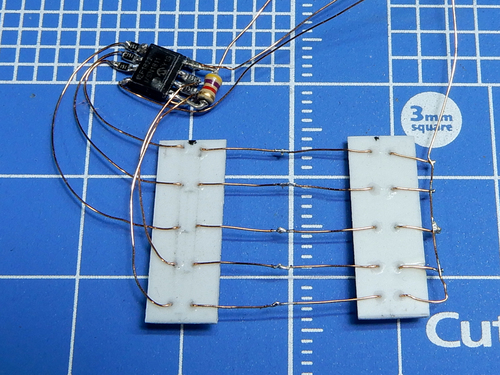
ここのLEDも2個を直列で繋ぐので、綺麗に並んだ配置になります。
今回は2Vでも十分発光する緑色のLEDを使うので、PICの出力でも2個のLEDを発光させる事ができますが、青やアイスブルーのLEDを使う時は2個直列では電力不足になります。
LEDの配線は、フタに0.3mmの穴を開けて外に引き出し、フタをした時に配線を挟まずにピッタリ閉じられる様に取り回しています。
保護抵抗もチップ抵抗を使ったので、とてもコンパクトに仕上がりました。
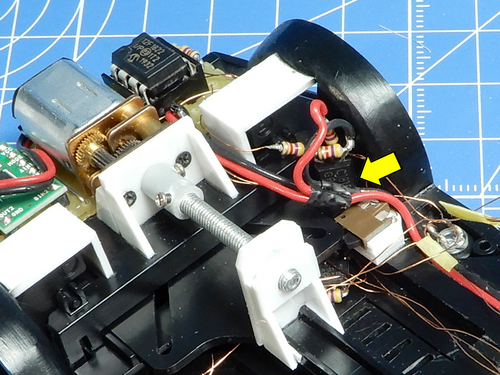
車体に取り付けます
PICはパーツのヘコんだ部分へ、潜り込ませる様に配置しました。
前後に可動するアームの下になります。
右側のくぼみには6個の丸穴用PICを、左側のくぼみには順送り用PICが収まっています。
SOPパッケージのPICだから納まったスペースですね。
LEDのおしり側は、光った状態でエポパテを盛って遮光しました。
タイヤボックスとボディーに大きく隙間が開くので、遮光はしっかり対策します。
順送り発光のスリットに、透明カバーを付けます。
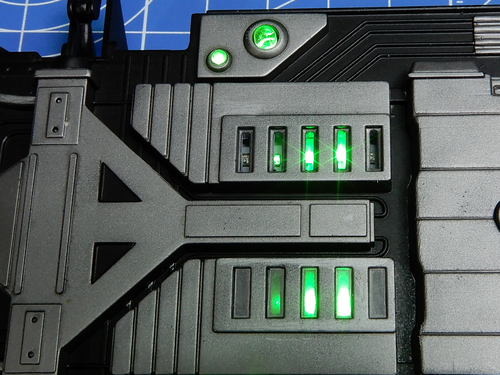
0.2mmの透明プラ板を、320番のヤスリで片面だけ曇らせ、ピカピカの面を表にして貼り付けました。
曇らせたことで、光が拡散してスリット全体が光ってくれることに期待しています。
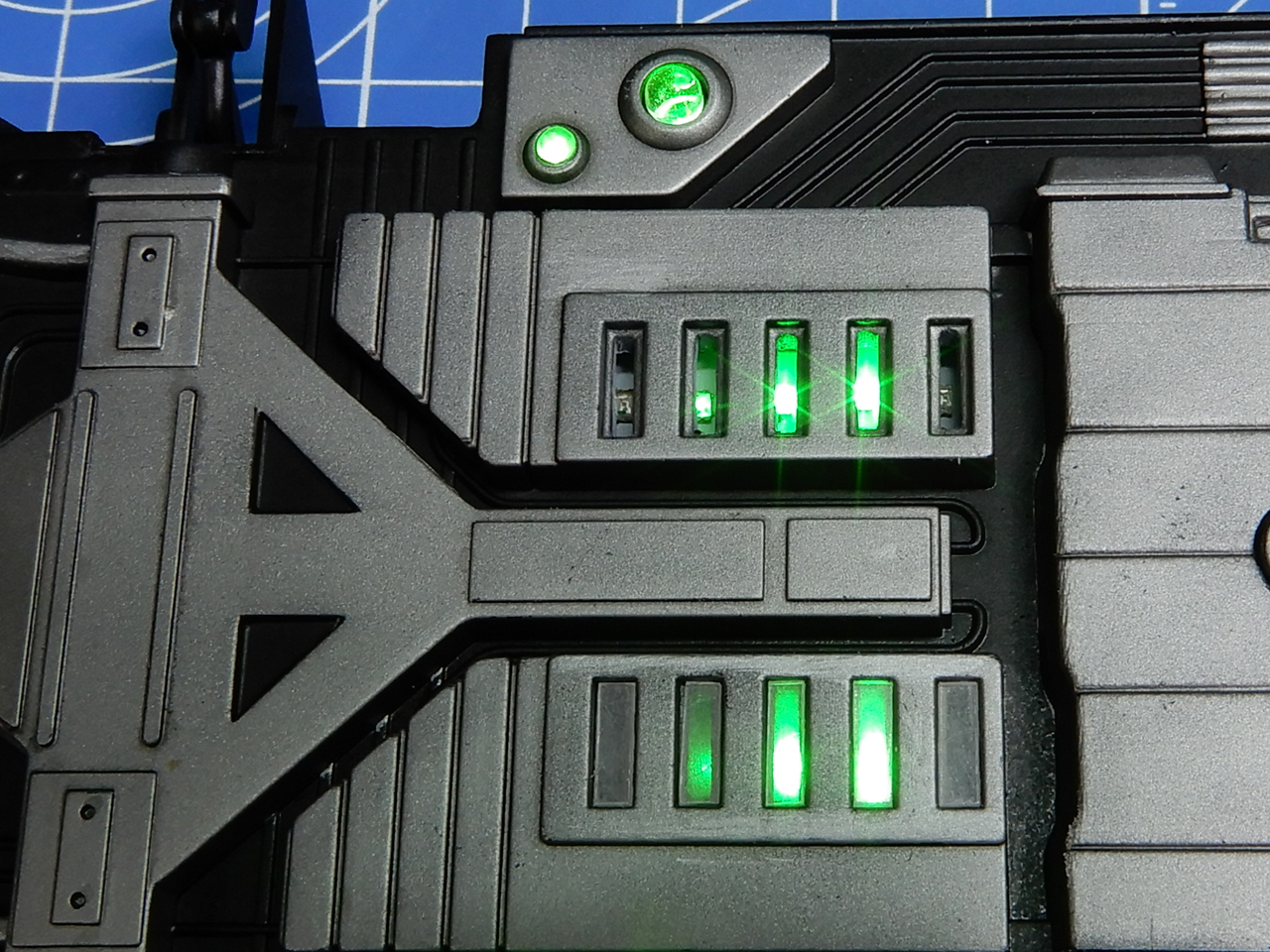
画像の上が透明プラ板無しの状態で、下が透明プラ板を付けた発光です。
下の方が残像状態の発光時まで綺麗に全体が発光してくれていますので、シメシメです。
今回の様に、LEDと発光面との距離があまり無い場所では、光のスポットをいかに作らない様にするかで、印象が違ってきます。
あ、あと、丸穴との光量バランスも上手く行ったみたいで良かったです。
最後に、動作の様子を動画でご覧下さい。
飛行状態にするスイッチを押すと、丸穴がフワッと光りだし、順送りLEDが流れ始めます。
車輪がモーターライズで倒れ、飛行状態になります。
もう一度スイッチを押すと、順送りLEDが消えて、丸穴LEDがスーッと消えながら、車輪が戻って走行状態になります。
やっとここまで出来ました。
まだまだやりたい事がたくさんあるんですよね。
次回も電飾の記事が続く予定です。
よろしくお願いします^^
LEDを組み込む穴を開口しましたので、まずは下面を塗装します。
電飾作品を作る場合は、塗装してからLEDを組み込む場合や、LEDを組み込んでから塗装する場合と、作業内容によって手順がコロコロ変わります。
下面は盛り上がっている部分をシルバーで塗装しますが、塗り分ける形状がとても複雑な形をしていて、黒を塗ってからシルバーを塗るとマスキングが大変そうです。
今回はシルバーを塗ってからブラックで塗装する事にしました。
シルバーを塗装しました。
盛り上がっている部分を、横になっている面も含めて塗装しています。
映画を観ると、そんなにギラギラしていない感じだったので、8番シルバーに光沢ブラックを半分近く混ぜ、グレーの様な暗いシルバーにしました。
次に、ブラックを塗装します。

100均の紙ばんそうこうで部分的にマスキングしながら、つや消しブラックで少しずつ塗り分けています。
溝の深い部分が多くあり、ブラックを塗ってからシルバーを塗っていたら、多分大変だったと思います。
赤い部分は映画では真っ赤な感じには見えなかったので、トーンを落として朱色に振りました。
裏側で暗く見える分、明るくして劇中の赤に近づける発色にしています。
最後にエナメルのフラットブラックでスミ入れしてメリハリを付けて、つや消しでトップコートです。
ツヤを消してしまうことで、鈍く光る鋳物(イモノ)っぽさを出しました。
電飾には、極小のマイコンを使います。
モーター制御でも使ったマイコン、12F1822のSOPパッケージ版を使います。
1円玉に余裕で乗ってしまうサイズで、今回の様に工作スペースが狭い部分にマイコンを仕込む際に、とても便利です。
小さくても元の12F1822と性能は一緒で、1本の入力専用端子と5本の入出力端子を持ちます。
これなら、デロリアンの窪んだところに余裕で収まりそうです。
プログラミングは通常の大きさの12F1822で行います。

通常サイズの12F1822と全く同じですから、ブレッドボードで試作や開発を行い、プログラムが完成したら、書き込む時だけSOPパッケージに取替えます。
ただ、端子のサイズや幅が全然違いますので、通称「ゲタ」と呼ばれるアダプタで変換して書き込みます。
このゲタはちょっとお高いのですが、これがないとプログラムが書きこめないので、ガンガン使って元を取っています。
下面を電飾する回路図です。
6個の丸く光る部分と、5個×2列の順送りで光る部分で、2個のマイコンを使います。
丸く光る部分は単純にパッと光るだけでも良かったのですが、雰囲気を出したくてフワッと点灯して、スッと消えるアクションを付けてみます。
順送りの発光も、ただ順番に点灯するより、劇中の様に残光を残しながら点灯した方が良いでしょう。
ドクも、「どうせ作るなら、カッコいい方がええじゃろ!」と言っていましたし。
LEDは、配線の節約のために、2個を直列で繋いで、PICの出力5Vで2個を点灯させています。
丸点灯の方が、スリットから光が出てくる順送り発光より明るくなるはずですので、抵抗値を上げて暗くして、見た目で同じ明るさで点灯する様に調整しました。
2つのPICは、モーター制御PICからのモード信号で動き出します。
通常状態の時は0(0V)で、飛行状態になると1(5V)の信号が来ますので、飛行状態の時だけ発光する様にプログラムします。
モード信号は、一度トランジスタでスイッチングされて、モード信号が0の時は1、モード信号が1の時は0と、信号が逆転します。
実は、始めはモード信号をそのまま使って動作させたのですが、電源を入れるたびに不安定な動きになりました。
電源を入れるたびに、走行状態なのに発光したりしなかったり、飛行状態なのに光らなかったり、挙動不審な動きをしたのです。
どうやら、モーター制御PICが信号を出す前に電飾PICが信号を読みに行ってしまい、モードを勘違いしてしまうらしいです。
そこで、トランジスタでスイッチング回路を作って、電源ONでPICより先に5Vが立ち上がる回路を追加したワケです。
これでウソの様に安定してくれました。
トランジスタは、空中配線です。
予想外のトラブルで、余計な回路を仕込む余裕はありませんので、トランジスタと周辺の抵抗類は空中配線で組み立てました。
これを前輪と内装のスキマに押し込みます。
頭を下にして、逆さまに固定しています。
左側の、抵抗の先に繋がっている細い線がモード信号の配線です。
小さい丸穴のレンズを自作しました。
大きい丸穴は3mmLEDをそのまま挿せばOKですが、小さい丸穴は約2.5mmと小さいです。
透明なランナーの先をヤスって丸めてからカットして、レンズを作ってハメ込みました。
裏にチップLEDを埋めます。
裏に出来たくぼみの中に1608(1.6mm×0.8mm)LEDを置いて、透明なエポキシ接着剤で固定しました。
すぐとなりの3mm砲弾型LEDと直列でつないでPICへ接続します。
順送り部分は仕切り板を作って光を閉じ込めます。
0.5mmのプラ板で仕切りを作って、LEDの光が1つのスリットだけ発光させる部屋を作ります。
プラ板から光が漏れてしまったら台無しなので、ブラックで完全に遮光してから、反射率の良い白で塗装して、箱の内部で光を拡散させます。
スリット全体が均一に光り、LEDの光点だけ明るく光ってしまうのを防ぐためです。
ちなみに、シルバーは若干ですが反射した色が変わるので、わざわざ黒と白の2色を使っています。
LEDとPICを取り付けました。
ここのLEDも2個を直列で繋ぐので、綺麗に並んだ配置になります。
今回は2Vでも十分発光する緑色のLEDを使うので、PICの出力でも2個のLEDを発光させる事ができますが、青やアイスブルーのLEDを使う時は2個直列では電力不足になります。
LEDの配線は、フタに0.3mmの穴を開けて外に引き出し、フタをした時に配線を挟まずにピッタリ閉じられる様に取り回しています。
保護抵抗もチップ抵抗を使ったので、とてもコンパクトに仕上がりました。
車体に取り付けます
PICはパーツのヘコんだ部分へ、潜り込ませる様に配置しました。
前後に可動するアームの下になります。
右側のくぼみには6個の丸穴用PICを、左側のくぼみには順送り用PICが収まっています。
SOPパッケージのPICだから納まったスペースですね。
LEDのおしり側は、光った状態でエポパテを盛って遮光しました。
タイヤボックスとボディーに大きく隙間が開くので、遮光はしっかり対策します。
順送り発光のスリットに、透明カバーを付けます。
0.2mmの透明プラ板を、320番のヤスリで片面だけ曇らせ、ピカピカの面を表にして貼り付けました。
曇らせたことで、光が拡散してスリット全体が光ってくれることに期待しています。
画像の上が透明プラ板無しの状態で、下が透明プラ板を付けた発光です。
下の方が残像状態の発光時まで綺麗に全体が発光してくれていますので、シメシメです。
今回の様に、LEDと発光面との距離があまり無い場所では、光のスポットをいかに作らない様にするかで、印象が違ってきます。
あ、あと、丸穴との光量バランスも上手く行ったみたいで良かったです。
最後に、動作の様子を動画でご覧下さい。
飛行状態にするスイッチを押すと、丸穴がフワッと光りだし、順送りLEDが流れ始めます。
車輪がモーターライズで倒れ、飛行状態になります。
もう一度スイッチを押すと、順送りLEDが消えて、丸穴LEDがスーッと消えながら、車輪が戻って走行状態になります。
やっとここまで出来ました。
まだまだやりたい事がたくさんあるんですよね。
次回も電飾の記事が続く予定です。
よろしくお願いします^^
2021-04-15 22:03
コメント(4)
ホイール電飾 [デロリアン製作記]
今回はホイールの電飾です。
ただ発光するだけでなく、回転しながら徐々に明るくなる効果を加えてみました。
劇中でもデロリアンが飛行状態の時は、ホイールが眩く発光していますので、ぜひとも再現してみたいです。
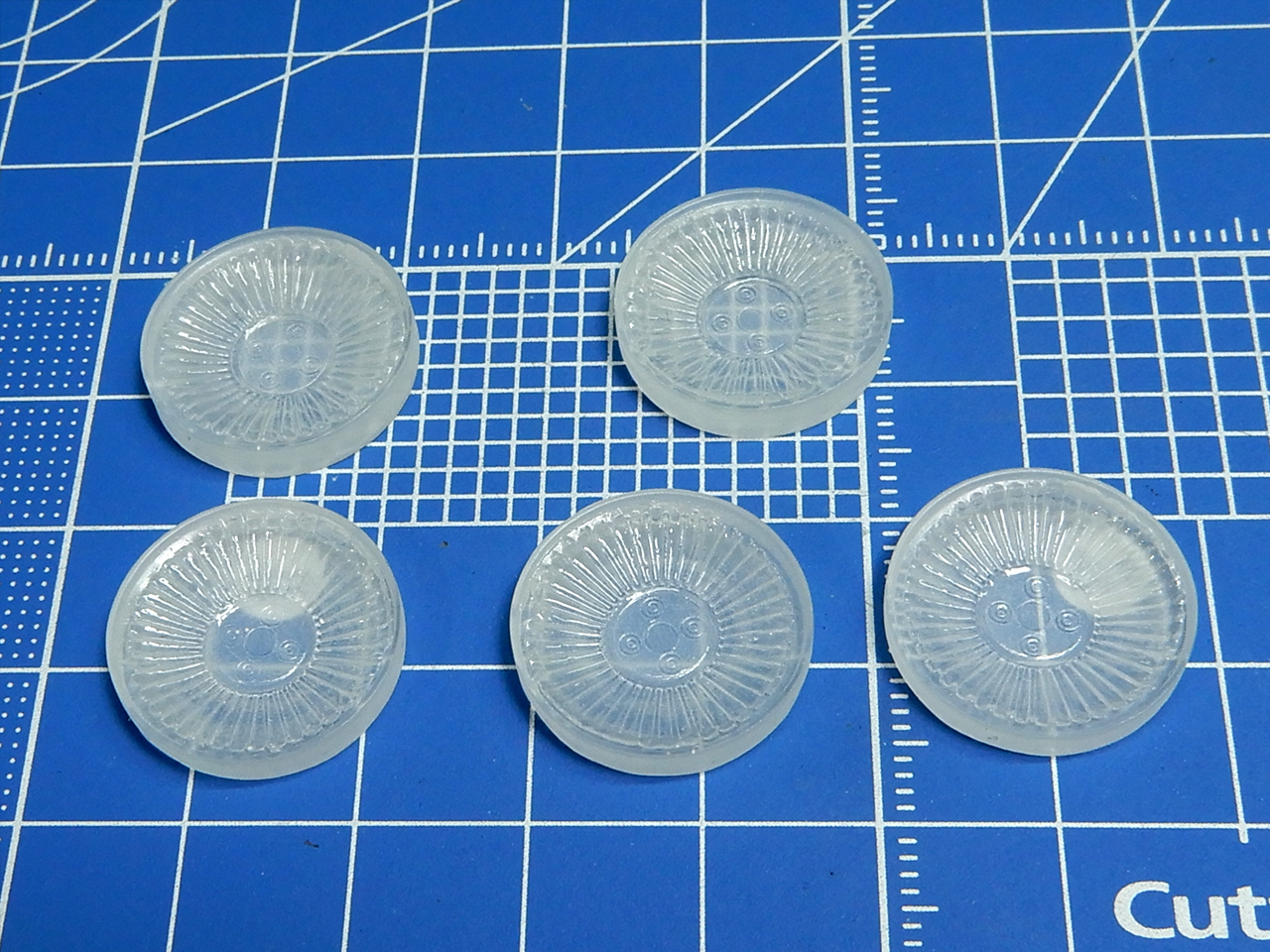
まずはホイールを透明化しなくてはなりませんね。
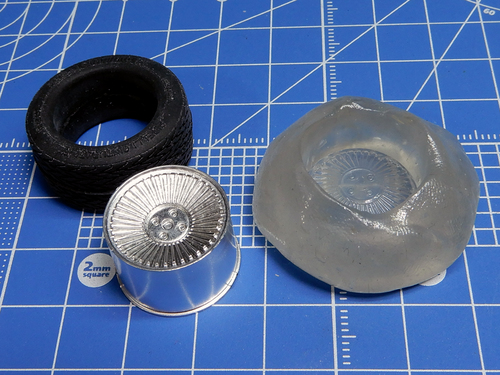
キットのホイールパーツを、おゆまるで型取りしました。
とても精密なパターンのあるホイールなので、ちゃんと型が取れるまで3回ほどやり直しています。
付属のタイヤはゴムで出来ているので質感は十分ですが、ここは「Good Year」にして欲しかったです。
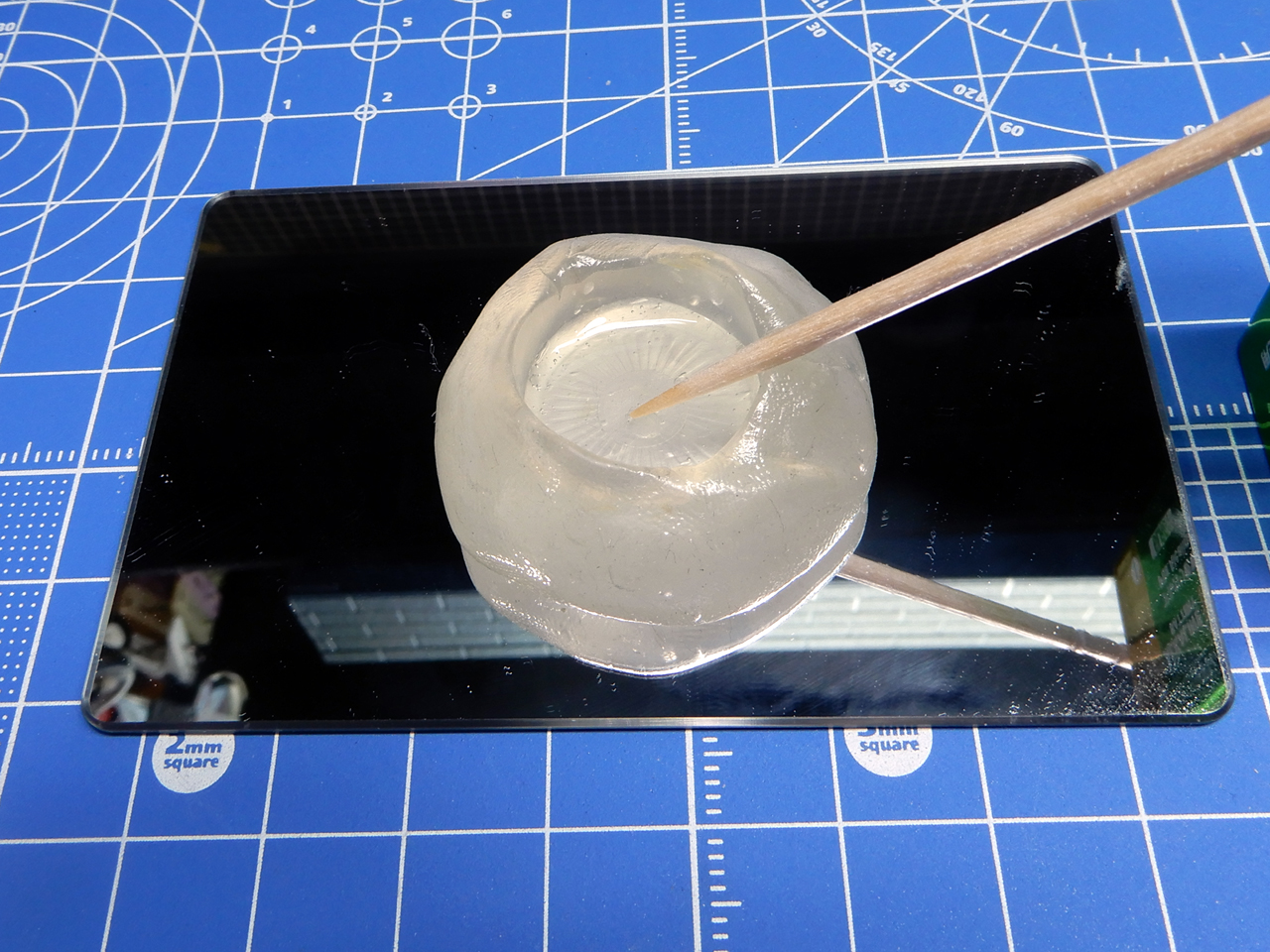
UVレジンで複製します。

100均のUVレジンと、これまた100均のUVライトで硬化させます。
今回はホイール内部にPICとLEDを収めますので、透明なホイール部分は出来るだけ薄くしたいところです。
いちばん窪んでいるセンターキャップが、レジンに浸るギリギリの深さに抑えて充填しました。
下に鏡を敷くと、UVライトが下からも照射されて硬化しやすくなります。
泡が大敵となります。
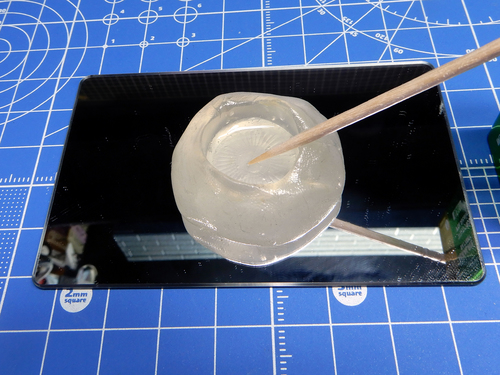
UVレジンは少々粘度がありますから、リム部分や窪んだ部分には小さな泡が出来ます。
この泡は発光させるととても目立って邪魔な存在となります。
泡はひとつひとつ爪楊枝で掻き出して、レジンから取り上げると消えてくれます。
UVレジンは蛍光灯などの光りでは硬化速度がゆっくりですから、慌てず徹底的に潰しましょう。
その時、下に鏡をひいて置くと、泡が見えやすくなります。
透明なホイールキャップが出来ました。

UVライトを60秒で4回くらい照射すれば、もう完全に硬化してくれます。
まるで成型品の様な、透明度の高いクリアーパーツが出来ます。
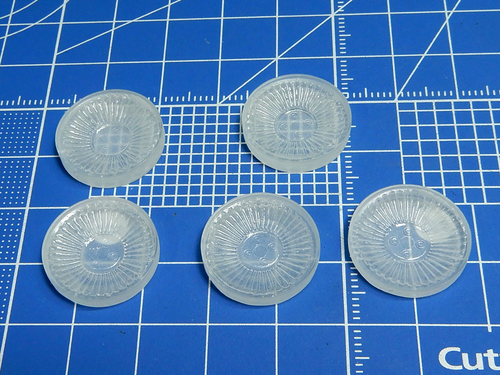
予備にもう一個複製(塗装の具合とか透過の実験とかしたいので)して、全部で5個作りました。
裏側を出来るだけ平面に削って、#320で細かいキズを付けて曇らせました。
今回はスペースの都合で、LEDと発光部分の距離が近いため、細かいキズで出来るだけ光を拡散して欲しいからです。
塗装します。

内部がスケスケでは、いかにも「ココ光りますよ」な感じなので、「えっ?ココ光るの?」な感じに仕上げます。
光度が落ちるのを承知でスモークを薄く吹き付け、8番シルバーをドライブラシしました。
センター部分だけは、筆塗りでは光った時に汚くなってしまうので、6mm穴のマスキングでエアブラシを使って綺麗に塗装しました。
ちなみに、リムは筆塗りです。
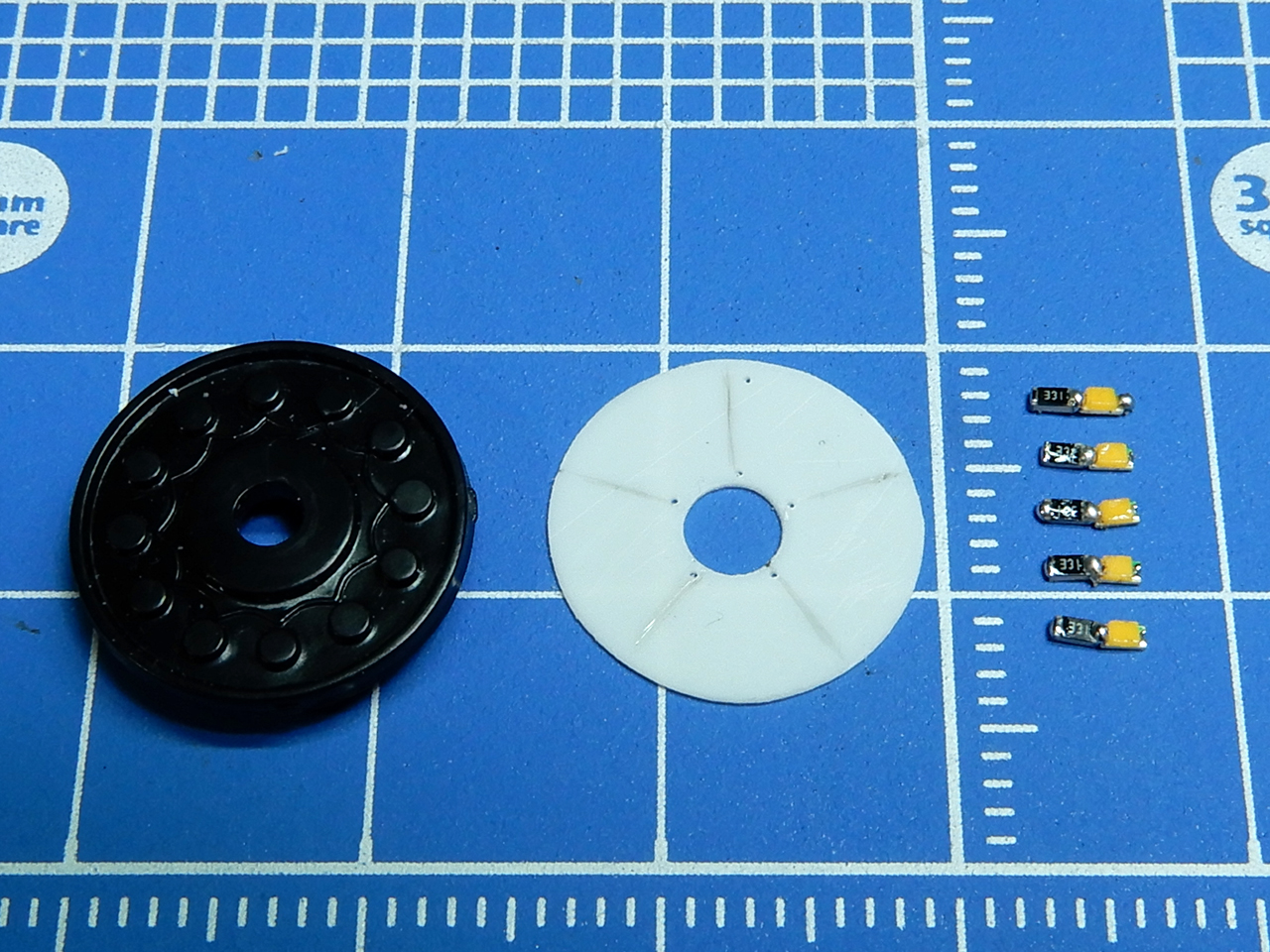
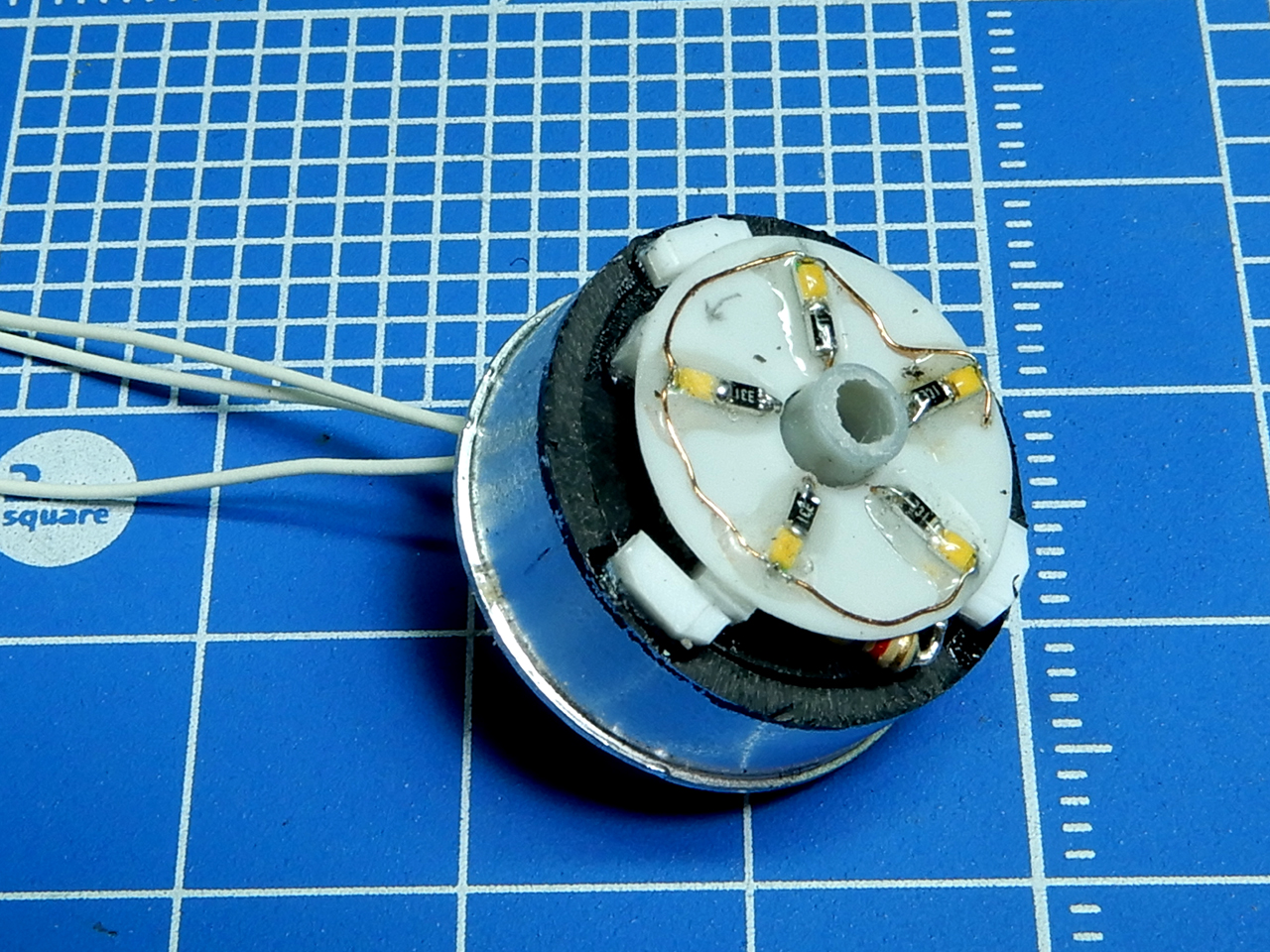
LEDを仕込みます。
ホイールの裏にはフタが付くのですが、このフタが前輪で4mm、後輪で6mmの深さに収まるため、
電飾を仕込める空間は、前後とも4mmしかありません。
この中にLEDとPICを収めるので、LEDは電球色の1608(1.6mm×0.8mm)タイプを使います。
フタより一回り小さく切り出した0.3mm厚プラ板に、5角形72度の放射線を引き、配線を通すための0.3mmの穴を開けます。
LEDは330Ωのチップ抵抗を直接ハンダ付けしました。
放熱させながらハンダ付けします。
LEDは外側がマイナスになる様にして、ポリウレタン線で繋いでいきます。
プラ板の線に合わせて長さを決めて、少し折り曲げて目印にします。
そこへハンダの玉をくぐらせてポリウレタンを蒸発させるのですが、銅製のポリウレタン線は熱伝道率も高いので、先に付けた部分のハンダまで溶けて外れてしまう場合があります。
そんな時は、金属製のクリップ(新品じゃないとダメ)を付けておくと、熱がクリップに逃げて伝わりにくくなります。
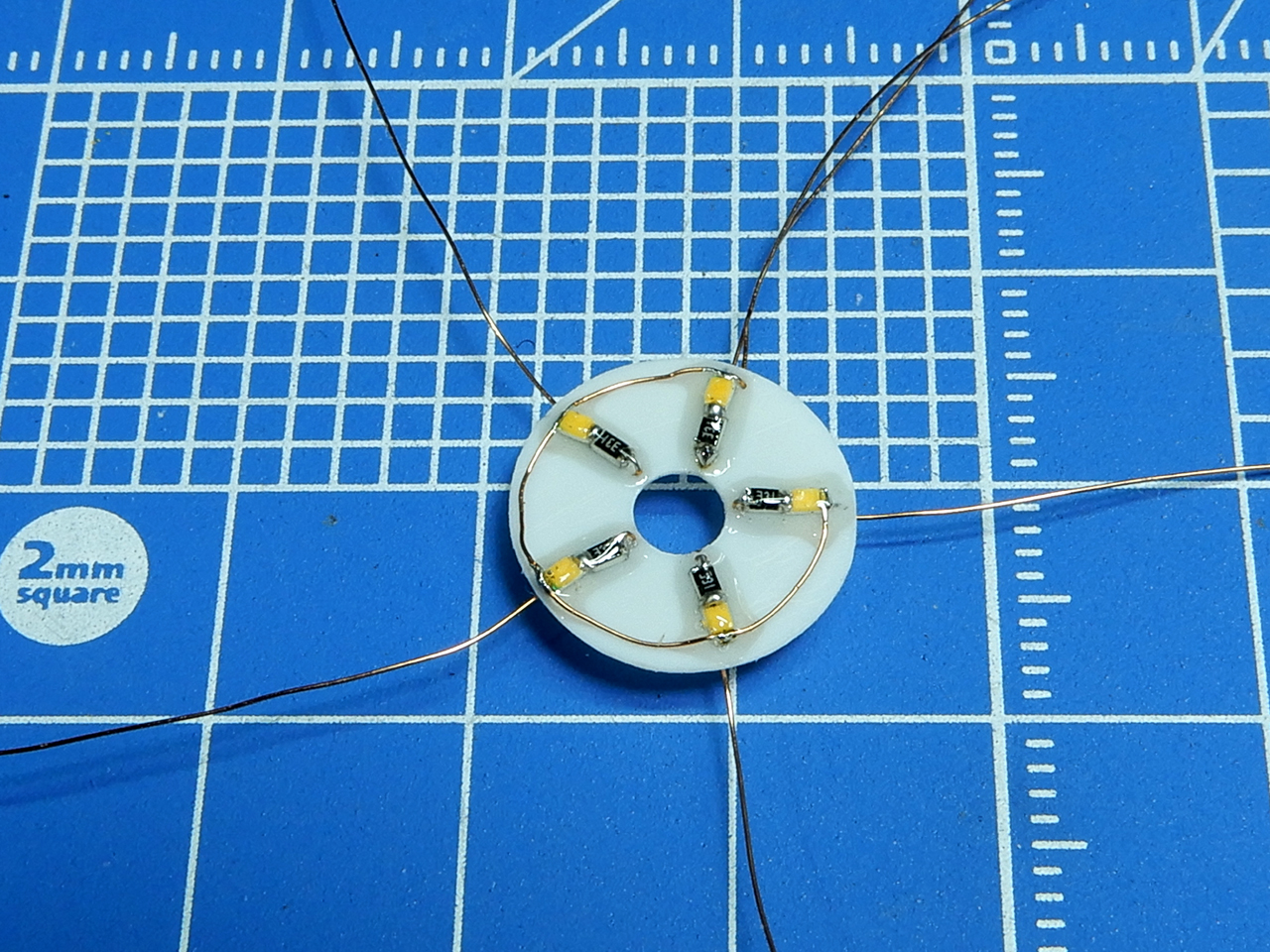
5個のLEDと抵抗が付きました。
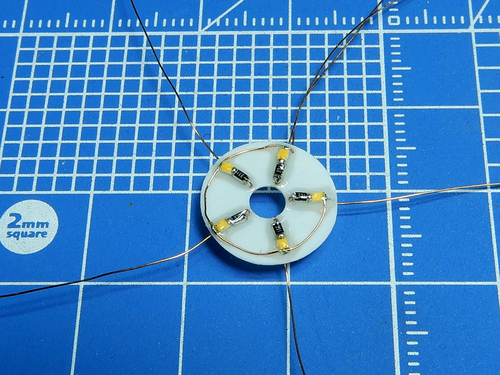
放射状にLED+抵抗を付け、配線はプラ板の裏側へと逃がします。
ここで点灯テストをして、OKならエポキシ接着剤でガッチリ固定してしまいます。
ハンダ付けされた部分は非常に小さいので、ちょっとしたショックで外れてしまう事がありますので、樹脂で固めてしまうことで事故を未然に防いでおきます。
ちなみに、パーツの固定はUVレジンでは光が届かない部分が硬化しないので不向きです。
時間が掛かって面倒ですが、エポキシ接着剤を使いましょう。
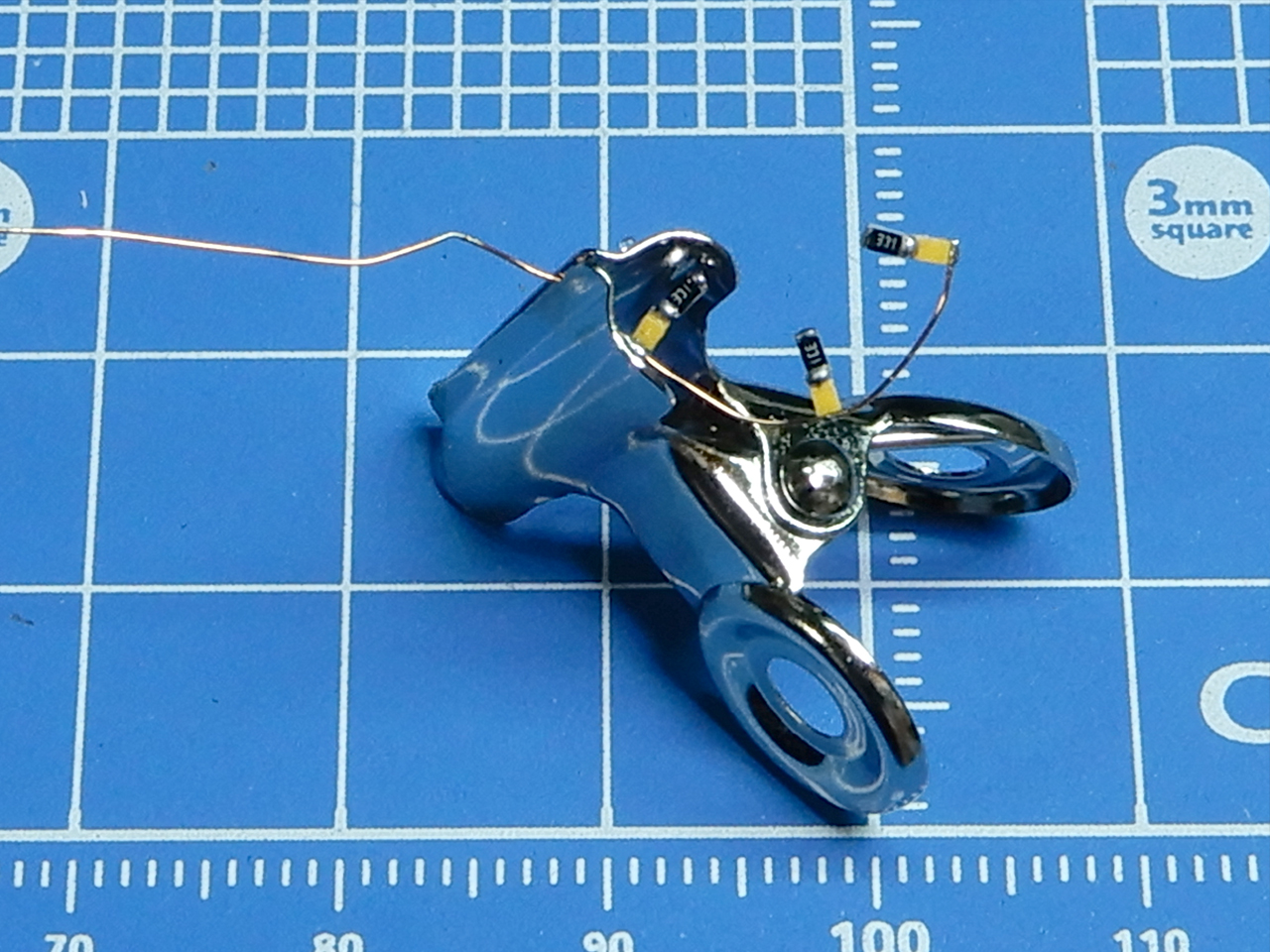
PICを取り付けます。
SOPパッケージの12F1822にプログラムを書き込み、表から通したポリウレタン線を配線します。
スイッチング用のプルアップ抵抗は、1/6wの小型のものを使いました。
抵抗の厚み分、フタ側をリューターで削って高さを抑えました。
車体の右側と左側で回転方向が逆になるので、配線する順番に注意します。
始めは前進したときタイヤが回る方向にしたのですが、なぜかすごく違和感を感じたので、左右を取り替えて逆向きに回転するようにしました。
これでPICとLEDの厚みは最大部分で3.8mmです。
何とか収まりそうですが、ちょっとハンダを盛り過ぎたらアウトな工作です。
ホイールをカットしました。

前輪は4mm、後輪は6mmの高さでマーキング(サインペンを固定してホイールを回す)して、ノコギリで多目にカットしてからヤスリで微調整し、ピッタリの高さでカットしました。
この高さが狂うと、車輪が納まった時にフェンダーから飛び出したり引っ込んだりして、カッコ悪くなっちゃいます。
発光部分を取り付けます。
ホイールのカット面に合わせてフタを取り付け、接着しました。
中心は固定するためのダボが来ますので、2.7mm穴に広げたプラパイプを接着しています。
電源のプラスとマイナス、それと走行/飛行のモード信号の線は、ポリウレタン線ではなく、0.54mmの耐熱電子ワイヤーにしました。
ポリウレタン線はただの銅線ですから、何度も可動させていると金属疲労でポッキリ逝ってしまいます。
この配線材は0.54mmという細さでありながら多芯(何本も線が入っていて柔軟性がある)なので、曲げに強い特性を持っています。
ポリウレタン線より見映えは悪くなりますが、トラブルを起こさない工作をして置いて損はありません。
裏側は塗装します。

フタとホイールの間には、僅かですがスキマが出来て、光が漏れてきてしまいますので、エポパテで埋めておきます。
ワイヤーが白いこともありますが、ホイールの裏側も見えてしまう、普通のカーモデルではありえない状態に変形しますので、塗装もしておきます。
始めはガンメタルで金属感を出した塗装をしましたが、ココに目が行って欲しくないので、つや消しブラックで全くつまんない塗装にしました。
見せたくない部分を目立たせないのも、塗装のテクニックですね。なんちゃって。
配線には余裕を持たせます。
配線はタイヤボックスに開けた2.5mmの穴を通して引き込み、内部で一度折り返してからプラ棒で固定して配線しています。
配線に余裕を持たせて、可動の妨げにならない様にしたのですが、どうしても余分な力が働いてしまい、車輪が完全に真下を向いてくれません。
それでも、断線してしまうよりはマシですから、ここは妥協するしかありませんね。
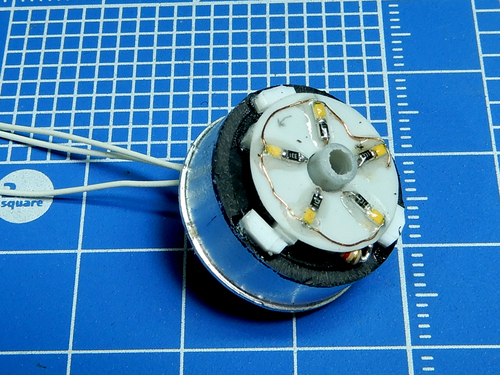
仕上がった車輪です。
ホイールのスキマが抜けているとまでは行かなくても、より実車に寄った感じにはなったと思います。
まさかこれが複製品で、しかも光って動くとは思わないでしょう。
そんなビックリドッキリメカにするのが楽しくて、模型を作っています。
動作の様子は、YouTubeにアップしました。
飛行状態に変形するスイッチを押すと、下面の丸LEDと5ポイントのバーが点灯し、ホイールも回転しながら段々と明るくなってきます。
車輪が動き始めて、下向きになる頃には、最大光度になります。
走行状態へ変形するスイッチを押すと、下面の丸やバー表示が消えて、ホイールは段々と暗くなりつつ回転が遅くなっていき、完全に戻る頃には消えてしまいます。
とりあえず上手く動いてくれましたが、電池で動かした場合、やっと動いてる感じになります。
モーターを動かすために電力のほとんどを持っていかれてしまう様です。
逆流防止のダイオードが仇となっているかも知れません。
電源がUSBの時は大丈夫なので、電池での変形はキツイですね。
9V角型電池は、内部に単6電池(海外ではメジャーな電池です)が6本入った構造で、電圧は高くても持続力が無い電池です。
ほかの電池を検討するべきでしょうが、べつに変形させなければ問題は無いので、今回は良い勉強になったという事で先に進みます。
【追記】2021.04.24
電池で変形させる時、動きが悪くなる不具合ですが、逆流防止用ダイオードを外したら、ほぼ解決出来ました。
ダイオードを通すと電圧が0.7V程低下しますが、電流の低下はかなり大きかった様です。
モーターは回転を始める時に大きな電力が必要になりますので、モーターが動き出す際には、LEDが一瞬チカッとしますが、ちゃんと元気に動いてくれます。
USBと電池を両方使わない様に気を付けなくてはならなくなりましたが、ブンドドの魅力には勝てず、ダイオードは外してしまいました。
これで安心して先に進めます。
ただ発光するだけでなく、回転しながら徐々に明るくなる効果を加えてみました。
劇中でもデロリアンが飛行状態の時は、ホイールが眩く発光していますので、ぜひとも再現してみたいです。
まずはホイールを透明化しなくてはなりませんね。

キットのホイールパーツを、おゆまるで型取りしました。
とても精密なパターンのあるホイールなので、ちゃんと型が取れるまで3回ほどやり直しています。
付属のタイヤはゴムで出来ているので質感は十分ですが、ここは「Good Year」にして欲しかったです。
UVレジンで複製します。

100均のUVレジンと、これまた100均のUVライトで硬化させます。
今回はホイール内部にPICとLEDを収めますので、透明なホイール部分は出来るだけ薄くしたいところです。
いちばん窪んでいるセンターキャップが、レジンに浸るギリギリの深さに抑えて充填しました。
下に鏡を敷くと、UVライトが下からも照射されて硬化しやすくなります。
泡が大敵となります。
UVレジンは少々粘度がありますから、リム部分や窪んだ部分には小さな泡が出来ます。
この泡は発光させるととても目立って邪魔な存在となります。
泡はひとつひとつ爪楊枝で掻き出して、レジンから取り上げると消えてくれます。
UVレジンは蛍光灯などの光りでは硬化速度がゆっくりですから、慌てず徹底的に潰しましょう。
その時、下に鏡をひいて置くと、泡が見えやすくなります。
透明なホイールキャップが出来ました。

UVライトを60秒で4回くらい照射すれば、もう完全に硬化してくれます。
まるで成型品の様な、透明度の高いクリアーパーツが出来ます。
予備にもう一個複製(塗装の具合とか透過の実験とかしたいので)して、全部で5個作りました。
裏側を出来るだけ平面に削って、#320で細かいキズを付けて曇らせました。
今回はスペースの都合で、LEDと発光部分の距離が近いため、細かいキズで出来るだけ光を拡散して欲しいからです。
塗装します。

内部がスケスケでは、いかにも「ココ光りますよ」な感じなので、「えっ?ココ光るの?」な感じに仕上げます。
光度が落ちるのを承知でスモークを薄く吹き付け、8番シルバーをドライブラシしました。
センター部分だけは、筆塗りでは光った時に汚くなってしまうので、6mm穴のマスキングでエアブラシを使って綺麗に塗装しました。
ちなみに、リムは筆塗りです。
LEDを仕込みます。
ホイールの裏にはフタが付くのですが、このフタが前輪で4mm、後輪で6mmの深さに収まるため、
電飾を仕込める空間は、前後とも4mmしかありません。
この中にLEDとPICを収めるので、LEDは電球色の1608(1.6mm×0.8mm)タイプを使います。
フタより一回り小さく切り出した0.3mm厚プラ板に、5角形72度の放射線を引き、配線を通すための0.3mmの穴を開けます。
LEDは330Ωのチップ抵抗を直接ハンダ付けしました。
放熱させながらハンダ付けします。
LEDは外側がマイナスになる様にして、ポリウレタン線で繋いでいきます。
プラ板の線に合わせて長さを決めて、少し折り曲げて目印にします。
そこへハンダの玉をくぐらせてポリウレタンを蒸発させるのですが、銅製のポリウレタン線は熱伝道率も高いので、先に付けた部分のハンダまで溶けて外れてしまう場合があります。
そんな時は、金属製のクリップ(新品じゃないとダメ)を付けておくと、熱がクリップに逃げて伝わりにくくなります。
5個のLEDと抵抗が付きました。
放射状にLED+抵抗を付け、配線はプラ板の裏側へと逃がします。
ここで点灯テストをして、OKならエポキシ接着剤でガッチリ固定してしまいます。
ハンダ付けされた部分は非常に小さいので、ちょっとしたショックで外れてしまう事がありますので、樹脂で固めてしまうことで事故を未然に防いでおきます。
ちなみに、パーツの固定はUVレジンでは光が届かない部分が硬化しないので不向きです。
時間が掛かって面倒ですが、エポキシ接着剤を使いましょう。
PICを取り付けます。
SOPパッケージの12F1822にプログラムを書き込み、表から通したポリウレタン線を配線します。
スイッチング用のプルアップ抵抗は、1/6wの小型のものを使いました。
抵抗の厚み分、フタ側をリューターで削って高さを抑えました。
車体の右側と左側で回転方向が逆になるので、配線する順番に注意します。
始めは前進したときタイヤが回る方向にしたのですが、なぜかすごく違和感を感じたので、左右を取り替えて逆向きに回転するようにしました。
これでPICとLEDの厚みは最大部分で3.8mmです。
何とか収まりそうですが、ちょっとハンダを盛り過ぎたらアウトな工作です。
ホイールをカットしました。

前輪は4mm、後輪は6mmの高さでマーキング(サインペンを固定してホイールを回す)して、ノコギリで多目にカットしてからヤスリで微調整し、ピッタリの高さでカットしました。
この高さが狂うと、車輪が納まった時にフェンダーから飛び出したり引っ込んだりして、カッコ悪くなっちゃいます。
発光部分を取り付けます。
ホイールのカット面に合わせてフタを取り付け、接着しました。
中心は固定するためのダボが来ますので、2.7mm穴に広げたプラパイプを接着しています。
電源のプラスとマイナス、それと走行/飛行のモード信号の線は、ポリウレタン線ではなく、0.54mmの耐熱電子ワイヤーにしました。
ポリウレタン線はただの銅線ですから、何度も可動させていると金属疲労でポッキリ逝ってしまいます。
この配線材は0.54mmという細さでありながら多芯(何本も線が入っていて柔軟性がある)なので、曲げに強い特性を持っています。
ポリウレタン線より見映えは悪くなりますが、トラブルを起こさない工作をして置いて損はありません。
裏側は塗装します。

フタとホイールの間には、僅かですがスキマが出来て、光が漏れてきてしまいますので、エポパテで埋めておきます。
ワイヤーが白いこともありますが、ホイールの裏側も見えてしまう、普通のカーモデルではありえない状態に変形しますので、塗装もしておきます。
始めはガンメタルで金属感を出した塗装をしましたが、ココに目が行って欲しくないので、つや消しブラックで全くつまんない塗装にしました。
見せたくない部分を目立たせないのも、塗装のテクニックですね。なんちゃって。
配線には余裕を持たせます。
配線はタイヤボックスに開けた2.5mmの穴を通して引き込み、内部で一度折り返してからプラ棒で固定して配線しています。
配線に余裕を持たせて、可動の妨げにならない様にしたのですが、どうしても余分な力が働いてしまい、車輪が完全に真下を向いてくれません。
それでも、断線してしまうよりはマシですから、ここは妥協するしかありませんね。
仕上がった車輪です。

ホイールのスキマが抜けているとまでは行かなくても、より実車に寄った感じにはなったと思います。
まさかこれが複製品で、しかも光って動くとは思わないでしょう。
そんなビックリドッキリメカにするのが楽しくて、模型を作っています。
動作の様子は、YouTubeにアップしました。
飛行状態に変形するスイッチを押すと、下面の丸LEDと5ポイントのバーが点灯し、ホイールも回転しながら段々と明るくなってきます。
車輪が動き始めて、下向きになる頃には、最大光度になります。
走行状態へ変形するスイッチを押すと、下面の丸やバー表示が消えて、ホイールは段々と暗くなりつつ回転が遅くなっていき、完全に戻る頃には消えてしまいます。
とりあえず上手く動いてくれましたが、電池で動かした場合、やっと動いてる感じになります。
モーターを動かすために電力のほとんどを持っていかれてしまう様です。
逆流防止のダイオードが仇となっているかも知れません。
電源がUSBの時は大丈夫なので、電池での変形はキツイですね。
9V角型電池は、内部に単6電池(海外ではメジャーな電池です)が6本入った構造で、電圧は高くても持続力が無い電池です。
ほかの電池を検討するべきでしょうが、べつに変形させなければ問題は無いので、今回は良い勉強になったという事で先に進みます。
【追記】2021.04.24
電池で変形させる時、動きが悪くなる不具合ですが、逆流防止用ダイオードを外したら、ほぼ解決出来ました。
ダイオードを通すと電圧が0.7V程低下しますが、電流の低下はかなり大きかった様です。
モーターは回転を始める時に大きな電力が必要になりますので、モーターが動き出す際には、LEDが一瞬チカッとしますが、ちゃんと元気に動いてくれます。
USBと電池を両方使わない様に気を付けなくてはならなくなりましたが、ブンドドの魅力には勝てず、ダイオードは外してしまいました。
これで安心して先に進めます。
2021-04-23 21:19
コメント(12)
ED-209 掲載 [模型誌掲載作品]
本日発売の、ModelGraphix誌 2021.06 No.439 へ、グットスマイルカンパニーさんのプラモデル、ED-209を掲載して頂きました(^^)/
今月はみんな大好きガルパン特集です。
めっちゃキュートな表紙で、おそらく売り切れると思いますので、お早めにお求め下さい。
だって、内容がすごいですもん。
そんなホットな号に、ED-209を掲載して頂けてラッキーです。

アルゴノーツのソフビキット(右)と比較してみました。
全高20cm以上になる大型キットです。
細部の改修に加え、今回はコンソールをスクラッチして、リモコン送信機を仕込みました。
右側のレバーがスイッチになっていて、押すと警告をしゃべって腕の機銃を発光させながら発砲音が鳴ります。
大きなキットだから仕込めたギミックですが、関節がクリッカブルなのでしっかりポージングできるおかげでもあります。
プラモデルと言うよりは、フィギュアモデルを自分で組み立てるイメージでしょうか。
とても手応えのあるキットですので、ロボコップファンは是非製作してみて下さい。
よろしくお願いします(^^)/
今月はみんな大好きガルパン特集です。
めっちゃキュートな表紙で、おそらく売り切れると思いますので、お早めにお求め下さい。
だって、内容がすごいですもん。
そんなホットな号に、ED-209を掲載して頂けてラッキーです。

アルゴノーツのソフビキット(右)と比較してみました。
全高20cm以上になる大型キットです。
細部の改修に加え、今回はコンソールをスクラッチして、リモコン送信機を仕込みました。
右側のレバーがスイッチになっていて、押すと警告をしゃべって腕の機銃を発光させながら発砲音が鳴ります。
大きなキットだから仕込めたギミックですが、関節がクリッカブルなのでしっかりポージングできるおかげでもあります。
プラモデルと言うよりは、フィギュアモデルを自分で組み立てるイメージでしょうか。
とても手応えのあるキットですので、ロボコップファンは是非製作してみて下さい。
よろしくお願いします(^^)/
2021-04-24 23:15
コメント(0)
リモコン化 [デロリアン製作記]
デロリアンの走行/飛行形態の切替を、リモコン化しました。
※この記事は、市販品の改造になります。 実施される場合は、自己責任でお願いします。
車体下にスイッチを取り付け、走行/飛行形態の切替を可能にしましたが、見えない場所なので、どうも押しにくいです。
そこで、リモコン操作を可能にしてみました。
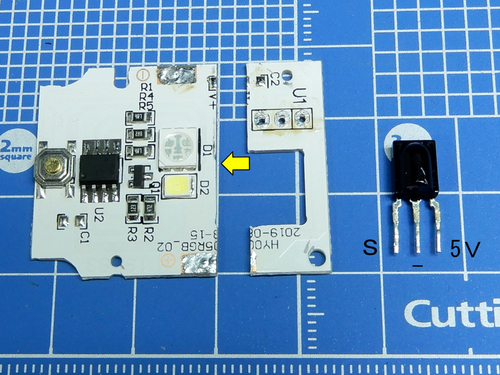
リモコン回路は、手っ取り早く100均のリモコンライトを流用しちゃいます。

電源ONで白色LEDが点灯し、赤・緑・青のLEDとその中間色をボタン一発で切り替えられて、しかも自動変化モードもあるので、ナカナカ楽しめるイルミネーションです。
今回はスイッチ1個をONにするだけで良いので、白色LEDを光らせる部分だけを使います。
実は今月のModelGraphix誌に掲載して頂いたED-209も、この回路を使ってリモコン化しています。
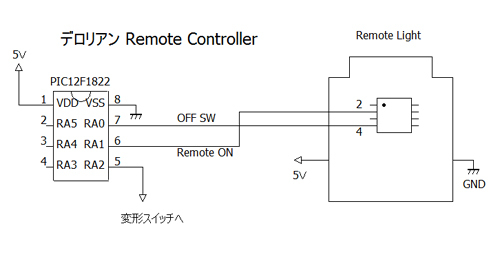
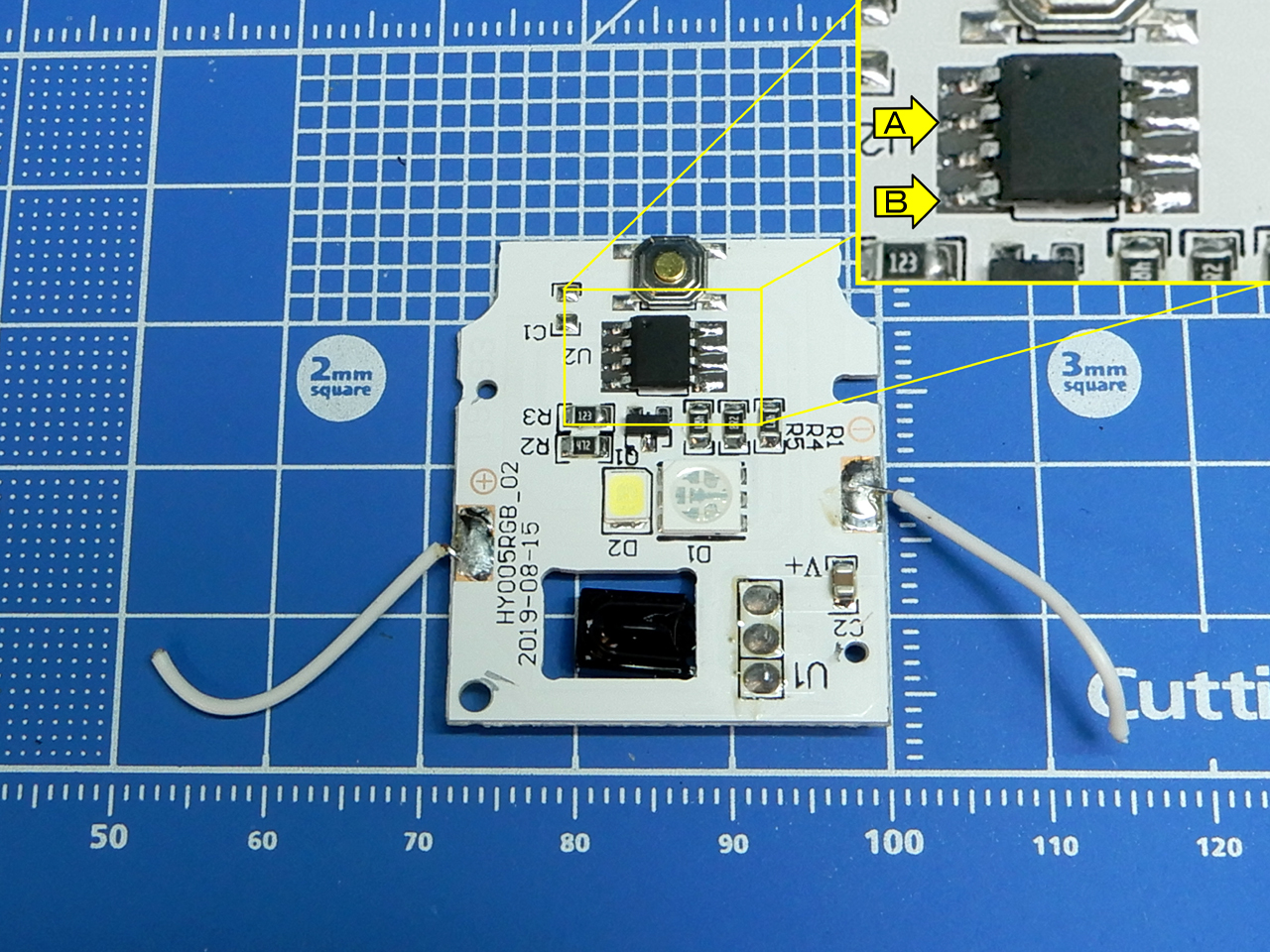
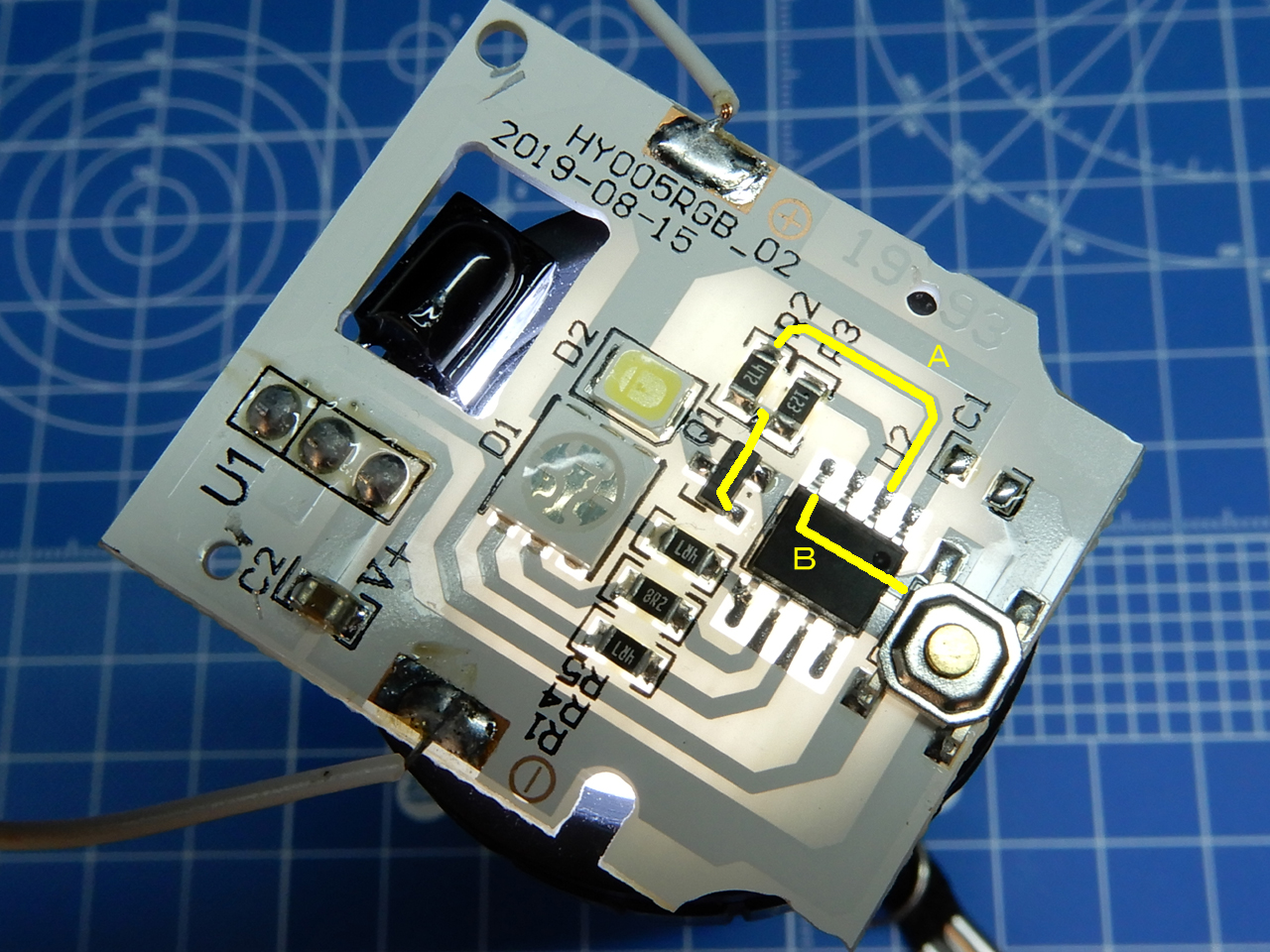
受信機を分解して、回路を取り出しました。
8本足のICがマイコンで、赤外線で受信した信号を判別して白色LEDやフルカラーLEDを制御しているのが判ります。
基板のパターンを見ると、マイコンのA(2番端子)が「H」(5V)になると、白色LEDが点灯するようです。
でも、点灯したままでは、ずっと「H」のままですので、困りますね。
元の消えた状態に戻ってくれないと、スイッチがずっとONのままです。
このイルミネーションライトは、白色LEDが点灯してから乳白色のドームを押す度に色が変わって、5回押すと全てのLEDが消えて、最初の状態に戻ります。
マイコンの上に押しボタンスイッチがありますが、これを5回押せば同じ動作になりますね。
スイッチが押された事を検知しているのがB(4番端子)なので、この端子を5回、0Vにすればスイッチを5回押した事と同じになります。
仕組みは判りましたが、2番端子が5Vになった事を瞬時に検知して、4番端子を正確なタイミングで5回ON/OFFするには、PICマイコンにお任せするしかありません。
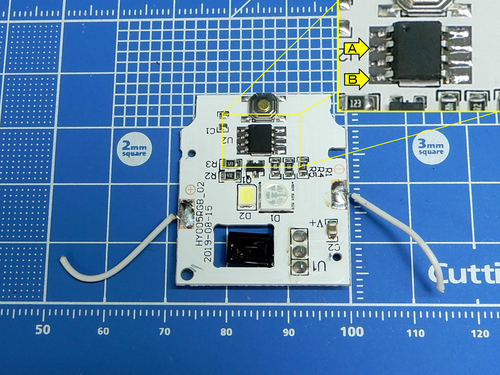
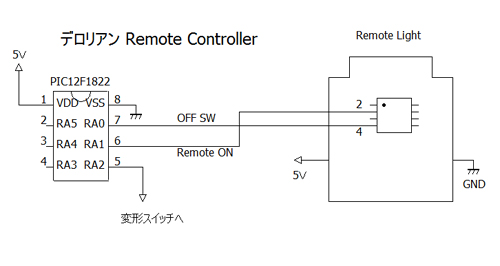
この様な回路になります。
リモコンのONボタンが押され、受信機の2番端子が5V(正確には4.4Vでした)になった事を、RA1端子で検知したら、RA2端子を5Vから0Vにして、デロリアンの変形スイッチを押したのと同じ事にして変形動作をスタートさせます。
次にRA0端子を5回ON/OFFして、4番端子へボタンを5回押した様に見せかけ、ライトをリセットしてまた待機状態に戻せば良いですね。
つまり、PICでライトを上手く騙してしまうわけです。
プログラムはこの様になります。
初期設定部分は省略しています(このままでは動きません)
1~8 基本設定をしています
9 RA3の他、RA1を入力に設定します(右から0123・・と反対向)
11 受信機のボタンを押されていない状態「H」にしておきます
12 手動変形スイッチをOFF「H」にしておきます
15 ここから29行まで永久ループです
16 リモコンのONボタンが押され、白色LEDを点灯させようとすると、
2番端子がHになり、PICのRA1端子も1になります
17 RA2を0にして、変形のスイッチを押された状態にして作動させます
18 相手のPICが0を検出する時間100ms待ちます
19 スイッチをOFFに戻します
21 モーターが起動するとき電圧が不安定になるので、ちょっと待ちます
22~27 RA0を30ms間隔で5回ON/OFFして、受信機に5回ボタンが
押されたと思わせてリセットします
29 またRA1が1になるのを待ち続けます
この様に、手動で操作することを、PICで正確に行っているだけですね。
受信機の配線パターンを読んだと書きましたが、裏からライトで照らすと判り易いです。
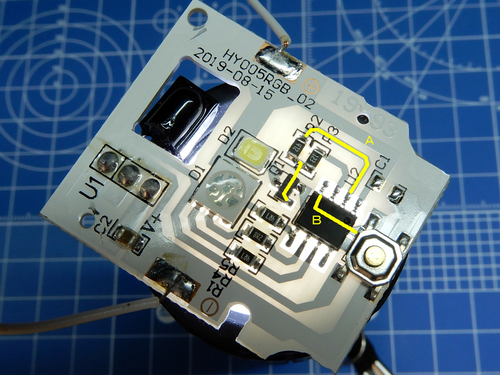
裏側からもよく見ると、黄色の線で繋がっているのがわかるので、どの端子にどんな信号が行っているのか判別することができました。
んで、このままでは基板が大きくて収まらないため、どこでカットするかも検討します。
この様にカットしました。
赤外線の受光部は、膨らんでいる方を上にして、右から5V,GND、出力となっています。
出力はD1と書いてある部分のパターンに繋がっていましたので、配線で繋げば受光部を好きな場所へ引き回せますね。
スペース確保のため、タイヤボックスをカットしました
ボンネットとのスキマに潜り込ませるので、タイヤボックスをカットして受信機の収納スペースを作ります。
ここは余程覗き込まないと見えない部分なので、美観を損なう事は無いでしょう。
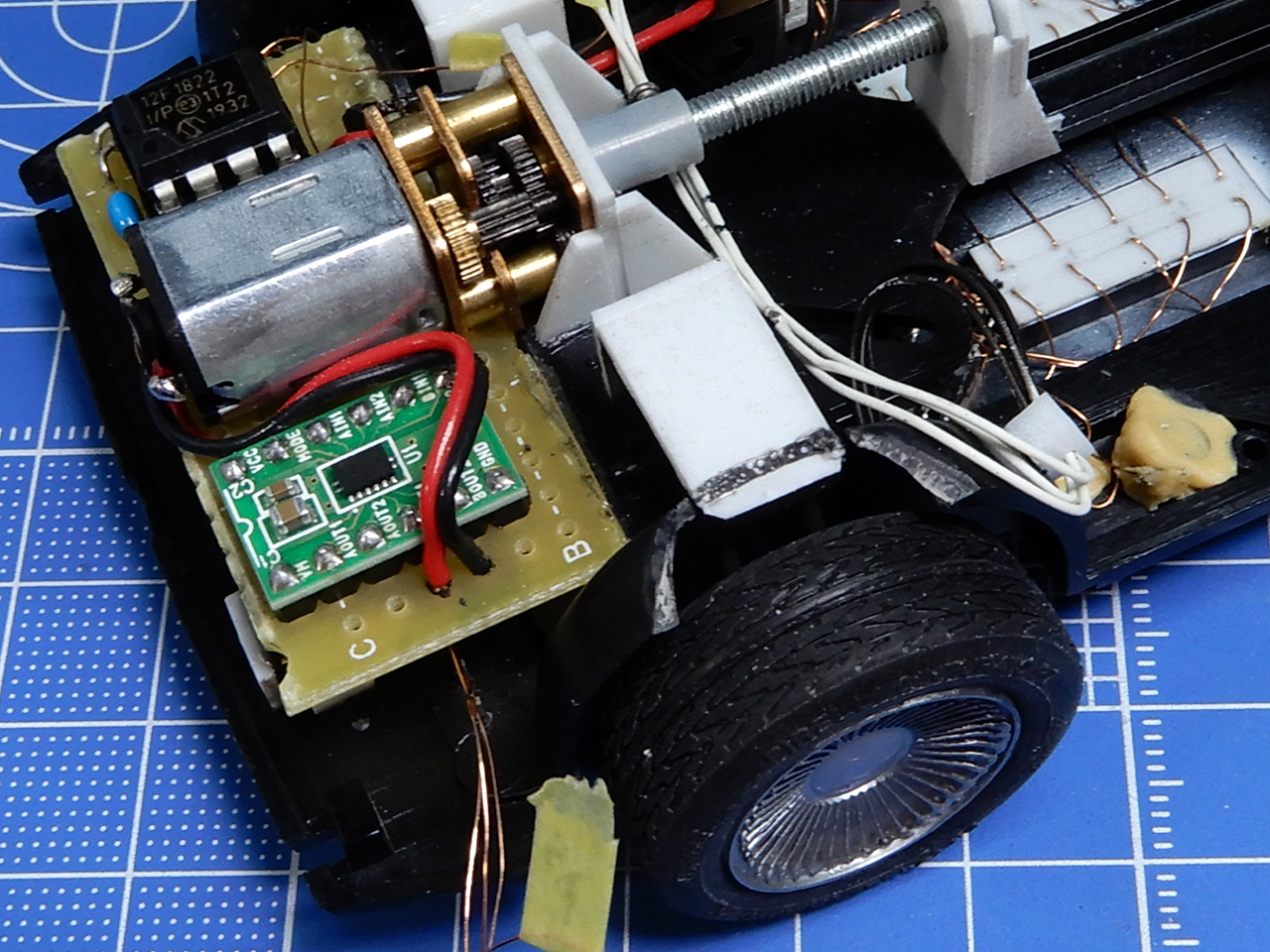
リモコン受信機を取り付けました。
受信機の基板やパーツが薄いので助かりました。
何とかボンネットとのスキマに収まっています。
元々付いていたLEDは、点灯しちゃっても困るので、白色もフルカラーも取り外してしまいました。
コントロールするPICは、受信機の裏側に取り付けました(すみません、写真を撮り忘れました)
なお、基板をカットした時、電圧安定用のコンデンサを外してしまったので、0.1μFのセラミックコンデンサ(水色の頭が見えています)をここに追加しています。
赤外線の受光部は、5V、GND、出力の3本の線で引き出して、シャーシの下部に取り付けました。

ここなら目立たないのですが、本当は外観を変える工作はしたくなかったです。
でも、受信感度を良くするにはこの場所が最適ですので、シブシブ取り付けました。
おかげで、3mくらい離れたところからでも、変形をコントロール出来るようになりました。
このセンサーは、ナカナカ感度が良いようです。
動作の様子は、YouTubeにアップしました。
送信機も、いかにも「リモコンです」な形なので、出来ればPART1でドクが操作していたプロポの形にしたいですね。
とりあえず上手く操作できるようにはなったので、あとでじっくり製作したいと思います。
これでシャーシ部分の工作は全て終了しました。
一応、イメージしていた改造は全て達成することが出来ました。
次はいよいよボディーの工作に着手したいと思います。
よろしくお付き合い下さいね。
※この記事は、市販品の改造になります。 実施される場合は、自己責任でお願いします。
車体下にスイッチを取り付け、走行/飛行形態の切替を可能にしましたが、見えない場所なので、どうも押しにくいです。
そこで、リモコン操作を可能にしてみました。
リモコン回路は、手っ取り早く100均のリモコンライトを流用しちゃいます。

電源ONで白色LEDが点灯し、赤・緑・青のLEDとその中間色をボタン一発で切り替えられて、しかも自動変化モードもあるので、ナカナカ楽しめるイルミネーションです。
今回はスイッチ1個をONにするだけで良いので、白色LEDを光らせる部分だけを使います。
実は今月のModelGraphix誌に掲載して頂いたED-209も、この回路を使ってリモコン化しています。
受信機を分解して、回路を取り出しました。
8本足のICがマイコンで、赤外線で受信した信号を判別して白色LEDやフルカラーLEDを制御しているのが判ります。
基板のパターンを見ると、マイコンのA(2番端子)が「H」(5V)になると、白色LEDが点灯するようです。
でも、点灯したままでは、ずっと「H」のままですので、困りますね。
元の消えた状態に戻ってくれないと、スイッチがずっとONのままです。
このイルミネーションライトは、白色LEDが点灯してから乳白色のドームを押す度に色が変わって、5回押すと全てのLEDが消えて、最初の状態に戻ります。
マイコンの上に押しボタンスイッチがありますが、これを5回押せば同じ動作になりますね。
スイッチが押された事を検知しているのがB(4番端子)なので、この端子を5回、0Vにすればスイッチを5回押した事と同じになります。
仕組みは判りましたが、2番端子が5Vになった事を瞬時に検知して、4番端子を正確なタイミングで5回ON/OFFするには、PICマイコンにお任せするしかありません。
この様な回路になります。
リモコンのONボタンが押され、受信機の2番端子が5V(正確には4.4Vでした)になった事を、RA1端子で検知したら、RA2端子を5Vから0Vにして、デロリアンの変形スイッチを押したのと同じ事にして変形動作をスタートさせます。
次にRA0端子を5回ON/OFFして、4番端子へボタンを5回押した様に見せかけ、ライトをリセットしてまた待機状態に戻せば良いですね。
つまり、PICでライトを上手く騙してしまうわけです。
プログラムはこの様になります。
初期設定部分は省略しています(このままでは動きません)
#include//#include "stdlib.h" //rand関数を使う時は有効にする #define _XTAL_FREQ 8000000 //delay関数を使う時は有効にする void main(void) { OSCCON = 0b01110010; //内部クロック8MHz 4MHzは0b01101010 ANSELA = 0b00000000; // アナログは使用しない(すべてデジタルI/Oに割当てる) TRISA = 0b00001010; // RA3は入力専用。RA1を入力に設定する PORTA = 0; // 出力ピンの初期化(全てLOWにする) RA0=1; //ボタンを5回押すピン プルアップしておく RA2=1; //変形SWへの信号 1:OFF 0:ON int i; while(1){ if(RA1==1){ //リモコン入力待ち RA2=0; //変形SW ON __delay_ms(100); //相手のPIC受信待ち RA2=1; //変形SW OFF __delay_ms(3000); //モーター起動電流安定待ち for(i=0;i<5;i++){ //リモコンOFF ボタン5回押す RA0=0; __delay_ms(30); RA0=1; __delay_ms(30); } //end of for i } } //End of while } //End of main
1~8 基本設定をしています
9 RA3の他、RA1を入力に設定します(右から0123・・と反対向)
11 受信機のボタンを押されていない状態「H」にしておきます
12 手動変形スイッチをOFF「H」にしておきます
15 ここから29行まで永久ループです
16 リモコンのONボタンが押され、白色LEDを点灯させようとすると、
2番端子がHになり、PICのRA1端子も1になります
17 RA2を0にして、変形のスイッチを押された状態にして作動させます
18 相手のPICが0を検出する時間100ms待ちます
19 スイッチをOFFに戻します
21 モーターが起動するとき電圧が不安定になるので、ちょっと待ちます
22~27 RA0を30ms間隔で5回ON/OFFして、受信機に5回ボタンが
押されたと思わせてリセットします
29 またRA1が1になるのを待ち続けます
この様に、手動で操作することを、PICで正確に行っているだけですね。
受信機の配線パターンを読んだと書きましたが、裏からライトで照らすと判り易いです。
裏側からもよく見ると、黄色の線で繋がっているのがわかるので、どの端子にどんな信号が行っているのか判別することができました。
んで、このままでは基板が大きくて収まらないため、どこでカットするかも検討します。
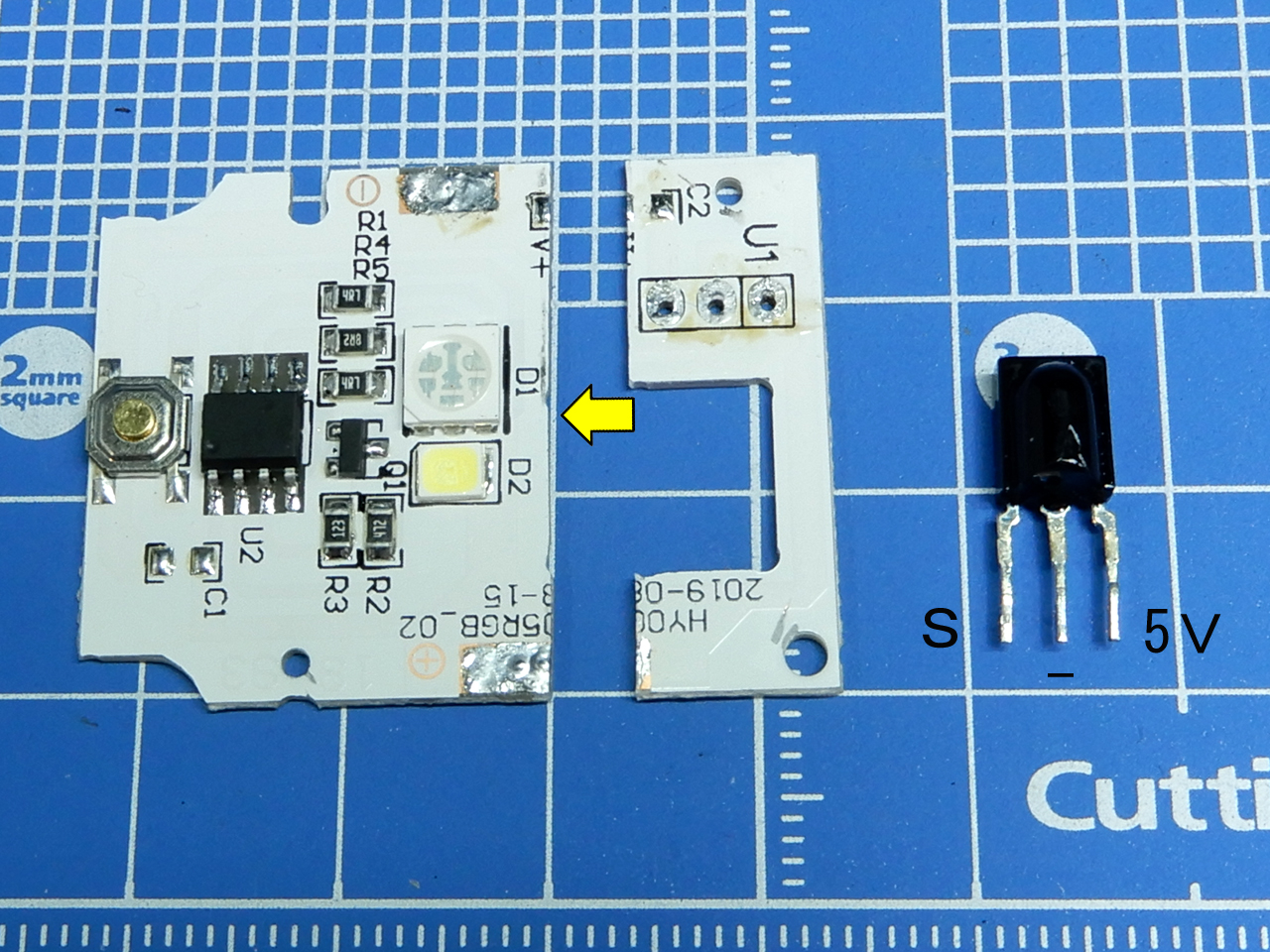
この様にカットしました。
赤外線の受光部は、膨らんでいる方を上にして、右から5V,GND、出力となっています。
出力はD1と書いてある部分のパターンに繋がっていましたので、配線で繋げば受光部を好きな場所へ引き回せますね。
スペース確保のため、タイヤボックスをカットしました
ボンネットとのスキマに潜り込ませるので、タイヤボックスをカットして受信機の収納スペースを作ります。
ここは余程覗き込まないと見えない部分なので、美観を損なう事は無いでしょう。
リモコン受信機を取り付けました。
受信機の基板やパーツが薄いので助かりました。
何とかボンネットとのスキマに収まっています。
元々付いていたLEDは、点灯しちゃっても困るので、白色もフルカラーも取り外してしまいました。
コントロールするPICは、受信機の裏側に取り付けました(すみません、写真を撮り忘れました)
なお、基板をカットした時、電圧安定用のコンデンサを外してしまったので、0.1μFのセラミックコンデンサ(水色の頭が見えています)をここに追加しています。
赤外線の受光部は、5V、GND、出力の3本の線で引き出して、シャーシの下部に取り付けました。

ここなら目立たないのですが、本当は外観を変える工作はしたくなかったです。
でも、受信感度を良くするにはこの場所が最適ですので、シブシブ取り付けました。
おかげで、3mくらい離れたところからでも、変形をコントロール出来るようになりました。
このセンサーは、ナカナカ感度が良いようです。
動作の様子は、YouTubeにアップしました。
送信機も、いかにも「リモコンです」な形なので、出来ればPART1でドクが操作していたプロポの形にしたいですね。
とりあえず上手く操作できるようにはなったので、あとでじっくり製作したいと思います。
これでシャーシ部分の工作は全て終了しました。
一応、イメージしていた改造は全て達成することが出来ました。
次はいよいよボディーの工作に着手したいと思います。
よろしくお付き合い下さいね。
2021-04-26 22:03
コメント(10)

お知らせ~
悪質なリンクを含んだ書き込みが
多発したため、URLを含んだコメント
は書込み出来ない設定にしました。
後了承下さいm(__)m
 「初心者用電飾模型工作入門
電飾しましょっ!」
どろぼうひげ/著 大日本絵画/刊
フルカラー96ページ 定価3,240円
模型を電飾したいけど、難しいのは無理!
何からすれば良いの?という超初心者へ
最短の近道をご案内いたします!
ただ今絶賛発売中です(^^)/
「初心者用電飾模型工作入門
電飾しましょっ!」
どろぼうひげ/著 大日本絵画/刊
フルカラー96ページ 定価3,240円
模型を電飾したいけど、難しいのは無理!
何からすれば良いの?という超初心者へ
最短の近道をご案内いたします!
ただ今絶賛発売中です(^^)/
 「電飾しましょっ!2 PIC編」好評発売中
B5判 88ページ 2500円+税
本書内容に不具合がある箇所についての
正誤表がMODELKASTENにて公開中です
PDFをダウンロードの上、ご活用下さい
正誤表のダウンロードはこちら
「電飾しましょっ!2 PIC編」好評発売中
B5判 88ページ 2500円+税
本書内容に不具合がある箇所についての
正誤表がMODELKASTENにて公開中です
PDFをダウンロードの上、ご活用下さい
正誤表のダウンロードはこちら
 「電飾しましょっ!3 Tips編」
B5判 107ページ 3200円+税
もう光るだけでは物足りない電飾モデラ
ーの皆さんへチョイテクを多数ご紹介!
PICでのモーター制御や調光まで網羅し
た、幅広く電飾を楽しめる一冊です(^^)/
「電飾しましょっ!3 Tips編」
B5判 107ページ 3200円+税
もう光るだけでは物足りない電飾モデラ
ーの皆さんへチョイテクを多数ご紹介!
PICでのモーター制御や調光まで網羅し
た、幅広く電飾を楽しめる一冊です(^^)/
 doro_hige という名前でさえずってます。
フォローよろしくです(^^♪
Follow @doro_hige
doro_hige という名前でさえずってます。
フォローよろしくです(^^♪
Follow @doro_hige
 DORO☆OFFの公式ブログです
展示会のサポートもこちらですよ
DORO☆OFFの公式ブログです
展示会のサポートもこちらですよ
多発したため、URLを含んだコメント
は書込み出来ない設定にしました。
後了承下さいm(__)m
| 「電飾しましょっ!」絶賛発売中! |
「初心者用電飾模型工作入門
電飾しましょっ!」
どろぼうひげ/著 大日本絵画/刊
フルカラー96ページ 定価3,240円
模型を電飾したいけど、難しいのは無理!
何からすれば良いの?という超初心者へ
最短の近道をご案内いたします!
ただ今絶賛発売中です(^^)/
| 「電飾しましょっ!2 PIC編」発売中! |
「電飾しましょっ!2 PIC編」好評発売中
B5判 88ページ 2500円+税
本書内容に不具合がある箇所についての
正誤表がMODELKASTENにて公開中です
PDFをダウンロードの上、ご活用下さい
正誤表のダウンロードはこちら
| 「電飾しましょっ!3 Tips編」発売中! |
「電飾しましょっ!3 Tips編」
B5判 107ページ 3200円+税
もう光るだけでは物足りない電飾モデラ
ーの皆さんへチョイテクを多数ご紹介!
PICでのモーター制御や調光まで網羅し
た、幅広く電飾を楽しめる一冊です(^^)/
| ツイッターやってます |
doro_hige という名前でさえずってます。
フォローよろしくです(^^♪
Follow @doro_hige
| DORO☆OFF公式ブログ |
DORO☆OFFの公式ブログです
展示会のサポートもこちらですよ
模型誌 掲載作品
各模型誌に掲載された作品です
 ModelGraphics No.292 2009.3 に掲載されました。
詳細はカテゴリー「スター・デストロイヤー 製作記」をご覧下さい。
ModelGraphics No.292 2009.3 に掲載されました。
詳細はカテゴリー「スター・デストロイヤー 製作記」をご覧下さい。
 2009.4 キャラクターエイジ VOL.02 に掲載されました。
詳細はカテゴリー「CA掲載ジオラマ制作記」をご覧下さい。
2009.4 キャラクターエイジ VOL.02 に掲載されました。
詳細はカテゴリー「CA掲載ジオラマ制作記」をご覧下さい。
 2009.9 キャラクターエイジ VOL.03 に掲載されました。
詳細はカテゴリー「CA3 エコー基地 製作記」をご覧下さい。
2009.9 キャラクターエイジ VOL.03 に掲載されました。
詳細はカテゴリー「CA3 エコー基地 製作記」をご覧下さい。
 2009.12 ModelGraphix No.302 に掲載されました。
詳細はカテゴリー「FM SnowSpeeder 製作記」をご覧下さい。
2009.12 ModelGraphix No.302 に掲載されました。
詳細はカテゴリー「FM SnowSpeeder 製作記」をご覧下さい。
 2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「CA4 HomeOne 製作記」をご覧下さい。
2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「CA4 HomeOne 製作記」をご覧下さい。
 2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「A-Wing Fighter製作記」をご覧下さい。
2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「A-Wing Fighter製作記」をご覧下さい。
 2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
 2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
 2011.05キャラクターエイジVol.06に掲載
詳細はCA6 1/48 TIE FIGHTER 製作記
をご覧下さい。
ランダム閃光発生回路の説明動画へ
2011.05キャラクターエイジVol.06に掲載
詳細はCA6 1/48 TIE FIGHTER 製作記
をご覧下さい。
ランダム閃光発生回路の説明動画へ
 2012.03 ModelGraphix 2012.04
に掲載させて頂きました。
詳細はNaboo StarFighter 製作記
をご覧下さい。
2012.03 ModelGraphix 2012.04
に掲載させて頂きました。
詳細はNaboo StarFighter 製作記
をご覧下さい。
 2012.11 Scale World Vol.2 に掲載
させて頂きました。
DVD付きで動画も楽しめます(^^)/
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
2012.11 Scale World Vol.2 に掲載
させて頂きました。
DVD付きで動画も楽しめます(^^)/
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
 2013.10 HobbyJapan 2013.11 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
2013.10 HobbyJapan 2013.11 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
 2013.10 ModelGraphix 2013.11に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
詳しい製作記はこちら
2013.10 ModelGraphix 2013.11に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
詳しい製作記はこちら
 2013.11 ModelGraphix 2013.12 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
2013.11 ModelGraphix 2013.12 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
") 2013.12 ModelGraphix 2014.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
製作記はこちら(Build Article Here)
2013.12 ModelGraphix 2014.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
製作記はこちら(Build Article Here)
 2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像と動画が表示されます
2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像と動画が表示されます
 2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
") 2014.04 ModelGraphix 2014.05 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
2014.04 ModelGraphix 2014.05 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 2014.05 ModelGraphix 2014.06 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
2014.05 ModelGraphix 2014.06 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 2014.06 HobbyJapan 2014.07 に
掲載させて頂きました。
バルグレイの完成画像はこちら
デバッケの完成画像はこちら
2014.06 HobbyJapan 2014.07 に
掲載させて頂きました。
バルグレイの完成画像はこちら
デバッケの完成画像はこちら
 2014.08 HobbyJapan 2014.08に
掲載させて頂きました。
シャングリ・ラーの完成画像と動画はこちら
デラメア級の完成画像はこちら
2014.08 HobbyJapan 2014.08に
掲載させて頂きました。
シャングリ・ラーの完成画像と動画はこちら
デラメア級の完成画像はこちら
 ModelGraphix 2014.09 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
ModelGraphix 2014.09 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
 ModelGraphix 2014.11 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix 2014.11 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 HobbyJapan 2015.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
HobbyJapan 2015.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2015.02 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌 2015.02 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 HobbyJapan誌 2015.02 に掲載、更に
作例集”星巡る方舟”編に掲載頂きました
ギミック満載の動画を公開しています
HobbyJapan誌 2015.02 に掲載、更に
作例集”星巡る方舟”編に掲載頂きました
ギミック満載の動画を公開しています

 HobbyJapan誌 2015.03 に掲載。更に
作例集”星巡る方舟”編に掲載頂きました
上の画像クリックで完成画像が表示されます
HobbyJapan誌 2015.03 に掲載。更に
作例集”星巡る方舟”編に掲載頂きました
上の画像クリックで完成画像が表示されます
 ModelGraphix誌2015.05 No.366 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌2015.05 No.366 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2015.08 No.369 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌 2015.08 No.369 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌2015.06 No.367 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌2015.06 No.367 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2015.09 No.370 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌 2015.09 No.370 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 HobbyJapan誌 2015.11 No.557 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
HobbyJapan誌 2015.11 No.557 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2016.01 No.374 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌 2016.01 No.374 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2016.02 No.375 に
掲載させて頂きました。
上の画像クリックで完成画像がが表示されます
ModelGraphix誌 2016.02 No.375 に
掲載させて頂きました。
上の画像クリックで完成画像がが表示されます
 ModelGraphix誌 2016.03 No.376に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
ModelGraphix誌 2016.03 No.376に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
 HobbyJapan誌 2016.03 No.561に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
HobbyJapan誌 2016.03 No.561に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
 ModelArt別冊、艦船模型スペシャル誌
2016 SPRING No.59 に
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
ModelArt別冊、艦船模型スペシャル誌
2016 SPRING No.59 に
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJAPAN誌 2016.04 No.561へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJAPAN誌 2016.04 No.561へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.06 No.564へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.06 No.564へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 ModelGraphix誌 2016.07 No.380 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
ModelGraphix誌 2016.07 No.380 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.07 No.565 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.07 No.565 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.09 No.567 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.09 No.567 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.10 No.568 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.10 No.568 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.11 No.569 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.11 No.569 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.12 No570 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.12 No570 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.02 No.572 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2017.02 No.572 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 ModelGraphix誌 2017.02 No.387 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
ModelGraphix誌 2017.02 No.387 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 ModelGraphix誌 2017.04 No.389 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
ModelGraphix誌 2017.04 No.389 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
完成画像はありません。
上の画像クリックで製作記
が表示されます
HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
完成画像はありません。
上の画像クリックで製作記
が表示されます
| Lot No.S-001 スターデストロイヤー |
ModelGraphics No.292 2009.3 に掲載されました。
詳細はカテゴリー「スター・デストロイヤー 製作記」をご覧下さい。
| Lot No.S-002 ホス&DSトレンチバトル |
2009.4 キャラクターエイジ VOL.02 に掲載されました。
詳細はカテゴリー「CA掲載ジオラマ制作記」をご覧下さい。
| Lot No.S-003 REBEL BASE |
2009.9 キャラクターエイジ VOL.03 に掲載されました。
詳細はカテゴリー「CA3 エコー基地 製作記」をご覧下さい。
| Lot No.S-004 FM SnowSpeeder |
2009.12 ModelGraphix No.302 に掲載されました。
詳細はカテゴリー「FM SnowSpeeder 製作記」をご覧下さい。
| Lot No.S-005 HomeOne |
2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「CA4 HomeOne 製作記」をご覧下さい。
| Lot No.S-006 A-Wing StarFighter |
2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「A-Wing Fighter製作記」をご覧下さい。
| Lot No.S-007 CA5 VC4 シャトル |
2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
| Lot No.S-008 CA5 VC4 スレーブ1 |
2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
| Lot No.S-009 CA6 TIE FIGHTER |
2011.05キャラクターエイジVol.06に掲載
詳細はCA6 1/48 TIE FIGHTER 製作記
をご覧下さい。
ランダム閃光発生回路の説明動画へ
| Lot No.S-010 Naboo StarFighter |
2012.03 ModelGraphix 2012.04
に掲載させて頂きました。
詳細はNaboo StarFighter 製作記
をご覧下さい。
| Lot No.S-011 フジミ SPINNER |
2012.11 Scale World Vol.2 に掲載
させて頂きました。
DVD付きで動画も楽しめます(^^)/
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
| Lot No.S-012 ゲルバデス級 ダロルド |
2013.10 HobbyJapan 2013.11 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
| Lot No.S-013 Viper Mk.Ⅱ |
2013.10 ModelGraphix 2013.11に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
詳しい製作記はこちら| Lot No.S-014 次元潜航艦 UX-01 |
2013.11 ModelGraphix 2013.12 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
| Lot No.S-015 BS GALACTICA |
2013.12 ModelGraphix 2014.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
製作記はこちら(Build Article Here) | Lot No.S-016 ヤマト2199 |
2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像と動画が表示されます
| Lot No.S-017 シュデルグ |
2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-018 BS PEGASUS |
2014.04 ModelGraphix 2014.05 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-019 ギガント |
2014.05 ModelGraphix 2014.06 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-020 バルグレイ |
2014.06 HobbyJapan 2014.07 に
掲載させて頂きました。
バルグレイの完成画像はこちら
デバッケの完成画像はこちら
| Lot No.S-021 シャングリ・ラー |
2014.08 HobbyJapan 2014.08に
掲載させて頂きました。
シャングリ・ラーの完成画像と動画はこちら
デラメア級の完成画像はこちら
| Lot No.S-022 AU-O9 アナライザー |
ModelGraphix 2014.09 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
| Lot No.S-023 ドメラーズⅢvsヤマト |
ModelGraphix 2014.11 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-024 N-ノーチラス号 |
HobbyJapan 2015.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-025 X-WING RED 3 |
ModelGraphix誌 2015.02 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-026 1/500 ヤマト2199 |
 HobbyJapan誌 2015.02 に掲載、更に
作例集”星巡る方舟”編に掲載頂きました
ギミック満載の動画を公開しています
HobbyJapan誌 2015.02 に掲載、更に
作例集”星巡る方舟”編に掲載頂きました
ギミック満載の動画を公開しています
| Lot No.S-027 ミランガル |
HobbyJapan誌 2015.03 に掲載。更に
作例集”星巡る方舟”編に掲載頂きました
上の画像クリックで完成画像が表示されます
| Lot No.S-028 AT-ST |
ModelGraphix誌2015.05 No.366 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-029 バラクーダ号 |
ModelGraphix誌 2015.08 No.369 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-030 1/48 X-WING |
ModelGraphix誌2015.06 No.367 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-031 Y-WING GOLD2 |
ModelGraphix誌 2015.09 No.370 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-032 マクロス要塞艦 |
HobbyJapan誌 2015.11 No.557 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-033 EP.Ⅶ ファルコン |
ModelGraphix誌 2016.01 No.374 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-034 グフカスタム |
ModelGraphix誌 2016.02 No.375 に
掲載させて頂きました。
上の画像クリックで完成画像がが表示されます
| Lot No.S-035 ハンタキラータンク |
ModelGraphix誌 2016.03 No.376に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
| Lot No.S-036 メカコレ ヤマト・ランベア |
HobbyJapan誌 2016.03 No.561に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
| Lot No.S-037 護衛艦あきづき |
ModelArt別冊、艦船模型スペシャル誌
2016 SPRING No.59 に
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-038 アスタコNEO |
HobbyJAPAN誌 2016.04 No.561へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-039 VM スタデ&X-WING |
HobbyJapan誌 2016.06 No.564へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-040 バンダイ A-WING |
ModelGraphix誌 2016.07 No.380 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-041 サンダーバード 2・4 号 |
HobbyJapan誌 2016.07 No.565 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-042 はしご付き消防車 |
HobbyJapan誌 2016.09 No.567 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-043 VM Poe'sX & FO TIE |
HobbyJapan誌 2016.10 No.568 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-044 マクロスエリシオン |
HobbyJapan誌 2016.11 No.569 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-045 VM Y-WING |
HobbyJapan誌 2016.12 No570 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-046 VM ファルコン |
HobbyJapan誌 2017.02 No.572 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-047 R.o. X-WING RED1 |
ModelGraphix誌 2017.02 No.387 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-048 VM タイセット |
HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-049 U-WING & タイセット |
HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-050 FMタイガーモス |
ModelGraphix誌 2017.04 No.389 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-051 アンドロメダ2202 |
HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-052 レイズナーヘッド |
HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
完成画像はありません。
上の画像クリックで製作記
が表示されます
製作記 STAR WARS 作品
| Lot No.001 ミレニアム・ファルコン |

| Lot No.003 SLAVE 1 |

| Lot No.004 X-WING |

| Lot No.007 シャトル・タイデリアム |
 2007-06-06 完成しました。
完成画像はこちら
カテゴリー「シャトル・タイデリアム製作記」
2007-06-06 完成しました。
完成画像はこちら
カテゴリー「シャトル・タイデリアム製作記」
| Lot No.011 Y-Wing |
 2007-08-21 完成しました。
完成画像はこちら
カテゴリー「Y-Wing製作記」
2007-08-21 完成しました。
完成画像はこちら
カテゴリー「Y-Wing製作記」
| Lot No.012 スター・デストロイヤー |
 2008-05-19 完成しました。
「模型誌掲載作品」へ移動しました。
2008-05-19 完成しました。
「模型誌掲載作品」へ移動しました。
| Lot No.014 JEDI STAR FIGHTER |
 2008-06-28 完成しました。
完成画像はこちら
カテゴリー「JEDI STAR FIGHTER 製作記」
2008-06-28 完成しました。
完成画像はこちら
カテゴリー「JEDI STAR FIGHTER 製作記」
| Lot No.016 mpc AT-AT |
 2008-09-06 完成しました。
完成画像はこちら
カテゴリー「mpc AT-AT 製作記」
2008-09-06 完成しました。
完成画像はこちら
カテゴリー「mpc AT-AT 製作記」
| Lot No.017 TIE INTERCEPTOR |
 2008-10-10 完成しました。
完成画像はこちら
2008-10-10 完成しました。
完成画像はこちら
| Lot No.018 Deth Star Surface |
 2008-10-27 完成しました。
完成画像はこちら
2008-10-27 完成しました。
完成画像はこちら
| Lot No.019 A-Wing Fighter |
 2008.12.16 完成しました。。
完成画像はこちら
カテゴリー「A-Wing Fighter 製作記」
2008.12.16 完成しました。。
完成画像はこちら
カテゴリー「A-Wing Fighter 製作記」
| Lot No.022 1/48 X-Wing Fighter |
 2009-05-15 完成しました。
完成画像はこちら
2009-05-15 完成しました。
完成画像はこちら| Lot No.027 FM 1/144 Falcon |
 2010.08.20 完成しました。
完成画像はこちら
カテゴリー「FM 144ファルコン 製作記」
2010.08.20 完成しました。
完成画像はこちら
カテゴリー「FM 144ファルコン 製作記」
| Lot No.031 VC4 スターデストロイヤー |
 完成画像はこちら
カテゴリー「VC4 スター・デストロイヤー 製作記」
完成画像はこちら
カテゴリー「VC4 スター・デストロイヤー 製作記」
| Lot No.021 Death Star Ⅱ |
 デススターⅡをフルスクラッチしました。
完成画像はこちら
製作過程を交えた完成ムービーはこちら
カテゴリー「Death Star Ⅱ 製作記」
デススターⅡをフルスクラッチしました。
完成画像はこちら
製作過程を交えた完成ムービーはこちら
カテゴリー「Death Star Ⅱ 製作記」
製作記 スタジオジブリ 作品







製作記 キャラクターもの
| Lot No.002 頭文字Dトレノ |

| Lot No.008 ザク Ver2.0 |
 2007-06-22 完成しました。
完成画像はこちら
カテゴリー「ザクVer2.0製作記」では、制作過程を紹介しています。
2007-06-22 完成しました。
完成画像はこちら
カテゴリー「ザクVer2.0製作記」では、制作過程を紹介しています。
| Lot No.015 AVP2エイリアン リペイント |
 2008-07-05 完成しました。
完成画像はこちら
カテゴリー「ALIEN リペイント」では、制作過程を紹介しています。
2008-07-05 完成しました。
完成画像はこちら
カテゴリー「ALIEN リペイント」では、制作過程を紹介しています。
| Lot No.023 アオシマ T-800 |
 2009-09-07 完成しました。
完成画像はこちら
首の電動化の動画はこちら
2009-09-07 完成しました。
完成画像はこちら
首の電動化の動画はこちら
| Lot No.024 MGアイマス機 双海真美 |
 2009-12-20 完成しました。
完成画像はこちら
2009-12-20 完成しました。
完成画像はこちら
| Lot No.026 Ma.K ポーラーベアー |
 2010-05-04 完成しました。
完成画像はこちら
2010-05-04 完成しました。
完成画像はこちら
| Lot No.028 ロボコップ ED-209 |
 2010-10-02 完成しました。
完成画像はこちら
2010-10-02 完成しました。
完成画像はこちら
| Lot No.034 Ma.k.クレーテ |
 完成画像はこちら
完成画像はこちら
| Lot No.035 LBX パンドラ |
 完成画像はこちら
完成画像はこちら
| Lot No.037 フジミ SPINNER |
 2012-08-30 完成しました。
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
2012-08-30 完成しました。
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
| Lot No.038 ごあいさつダンボー |
 上の画像クリックで製作記と動画へGo
上の画像クリックで製作記と動画へGo
| Lot No.041 LastExile ヴァンシップ |
 2013-03-03 完成しました。
画像クリックで完成画像と動画へGo
2013-03-03 完成しました。
画像クリックで完成画像と動画へGo
| Lot No.043 デコトラ「天下御免」 |
 2013.1頃に完成しています
画像クリックで完成画像と動画へGo
2013.1頃に完成しています
画像クリックで完成画像と動画へGo
製作記 宇宙船など
| Lot No.005 コスモゼロ |
 2007-03-03 完成しました。
完成画像はこちら
2007-03-03 完成しました。
完成画像はこちら
| Lot No.006 ブラックタイガー |
 2007-03-12 完成しました♪
完成画像はこちら
2007-03-12 完成しました♪
完成画像はこちら
| Lot No.009 BIRD OF PREY |
 2007-07-08 完成しました♪
完成画像はこちら
2007-07-08 完成しました♪
完成画像はこちら
| Lot No.045 メカコレヤマト2199 |
 2014-05-31 完成しました♪
完成画像と発射の動画はこちら
2014-05-31 完成しました♪
完成画像と発射の動画はこちら
| Lot No.010 ノストロモ号 |
 2005-12-18 完成しました♪
完成画像はこちら
2005-12-18 完成しました♪
完成画像はこちら
| Lot No.013 たまごスペースシャトル |
 2008-06-05 完成しました♪
完成画像はこちら
2008-06-05 完成しました♪
完成画像はこちら
| Lot No.025 DVD特典 宇宙戦艦ヤマト |
 2010-04-05 完成しました。
完成画像はこちら
2010-04-05 完成しました。
完成画像はこちら
| Lot No.033 Space Clipper |
 2012-02-13 完成しました。
完成画像はこちら
2012-02-13 完成しました。
完成画像はこちら
| Lot No.039 アルカディア号 |
 1012-11-20完成しました。
完成画像はこちら
1012-11-20完成しました。
完成画像はこちら| Lot No.048 シルフィード |
 16BitModels用として製作しました
2017.09完成しました。
16BitModels用として製作しました
2017.09完成しました。
