頭部の旋回 [1/2 BB-8 製作記]
本日から、ModelGraphix誌に掲載中のバンダイ 1/2 BB-8の製作記をスタートしたいと思います(^^)/
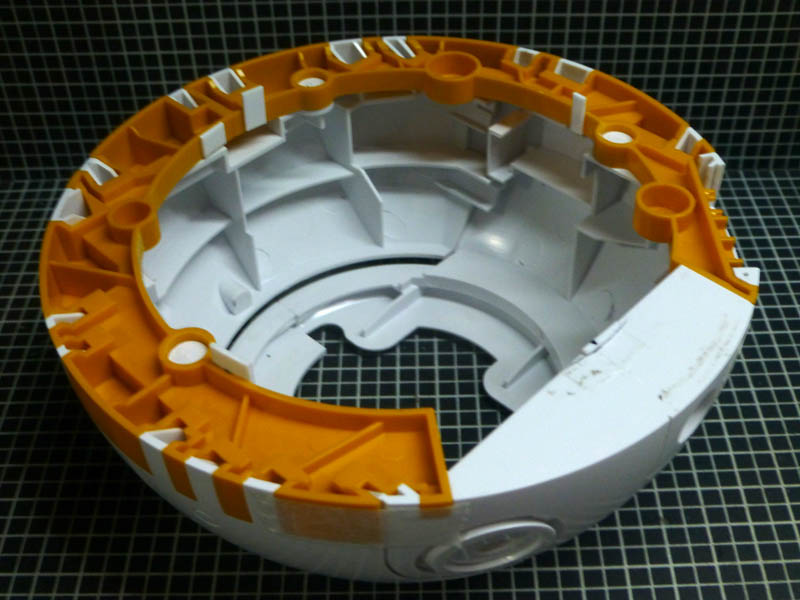
1/2と頭では判っていても、完成するとかなり大きく感じます。
胴体部分は、多角形が組み合わさったフレームがあり、そこへ外装を取り付けていく感じで、同じような形の巨大なパーツがたくさんあります(^_^;)
ちなみに、ダボの形が全て違うので、間違えることはありません。
この構造によって、球体なのに全てのパーツがしっかりと組み合わさります。
普通に考えれば、メルカトル図法のようなパーツ構成を考えると思いますが、色分けと強度が両立されている辺りは、さすがはバンダイですね。
巨大スケールですので、内部には結構な空間もあり、色々と仕込むには都合が良いです。
ただ光らせるだけでは面白く無いので、動いたりしゃべったりするギミックを仕込んでみる事にしました(^^♪
さて、今回は頭部を旋回させる工作です。
始めは胴体にモーターを仕込んで頭全体を旋回させるつもりでしたが、よく見ると頭全体が旋回しているのでは無く、シルバーの帯の上だけが動いているみたいです。
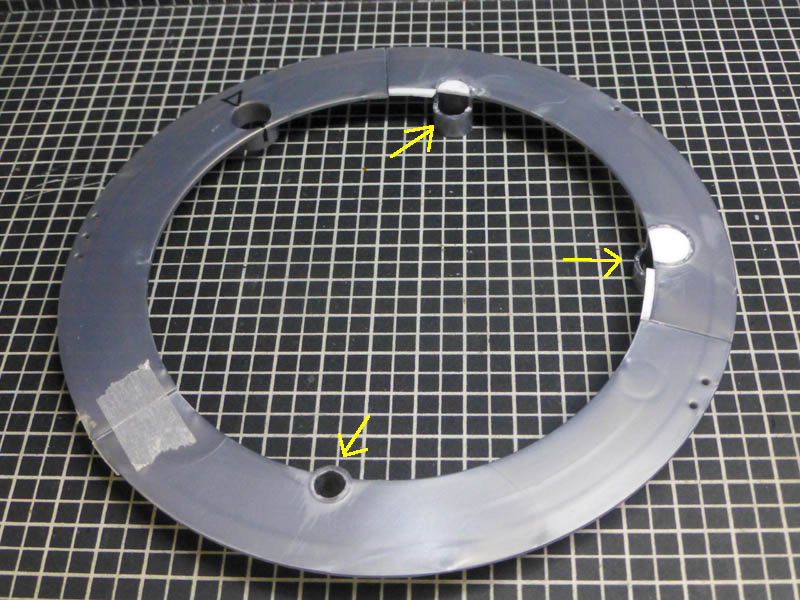
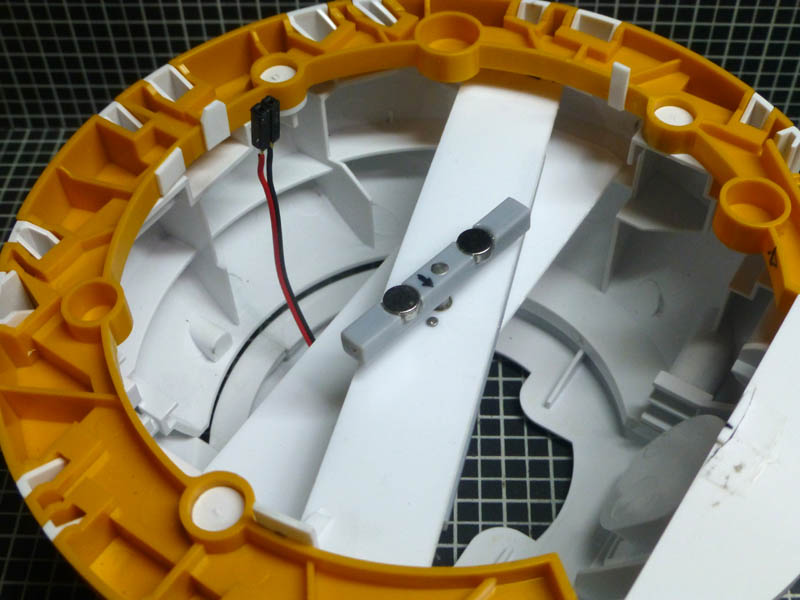
上部分のみ回転できる様に、パーツを加工しました。
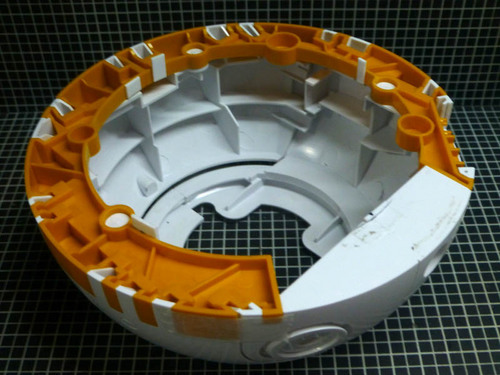
オレンジより上が旋回しますが、中心に回転軸を作っただけではブレが出てしまいます。
出来るだけ外縁で回転の邪魔にならない様に、オレンジのパーツにプラ板でガイドを付けました。
どの方向になっても外れないためには、最低でも3箇所にガイドが必要です。
ガイドを受ける側にも、加工が必要です。
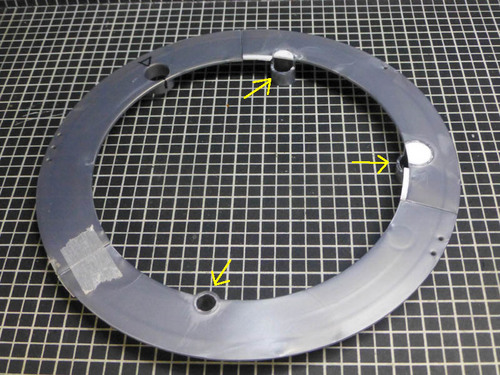
本来、パーツを取り付けるためのダボを切り取り、プラ板でフタをして引っ掛からない様にしました。
プラ板のガイドがスムーズに移動出来る様に、僅かな段差も修正しておきます。
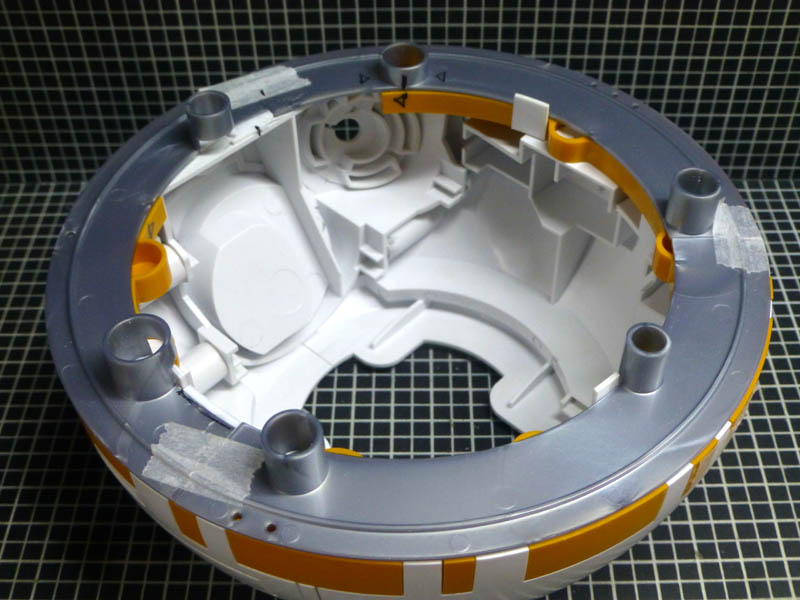
実際に、可動する部分を組み合わせてみました。
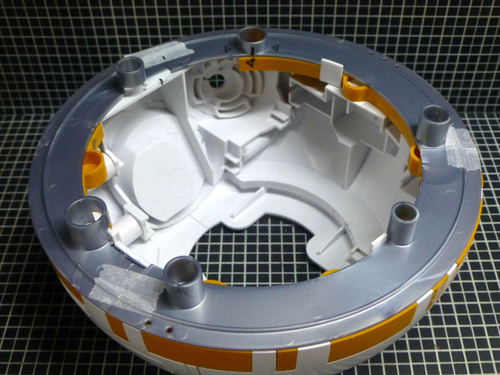
何度も回転させてみて、引っ掛かる部分が無いかチェック・修正していきます。
とりあえず、ほとんど負荷の無い回転が出来るようになりました。
回転させる時、パーツ同士がスレる音が出てしまうので、ツルツルのテープを貼ったり、金属線を貼り付けてみたりしたのですが、摩擦が大きくなってしまったり、隙間が出来てしまったりして、良い結果になりません(-_-)
結局、音は仕方が無いものとあきらめる事にしました。
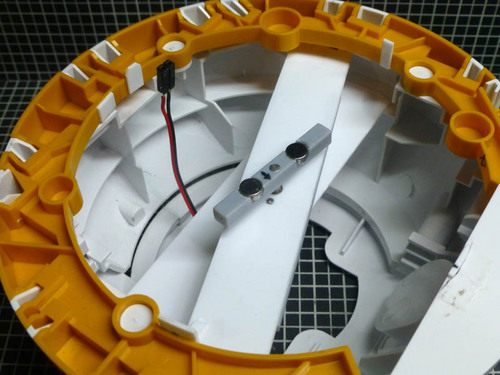
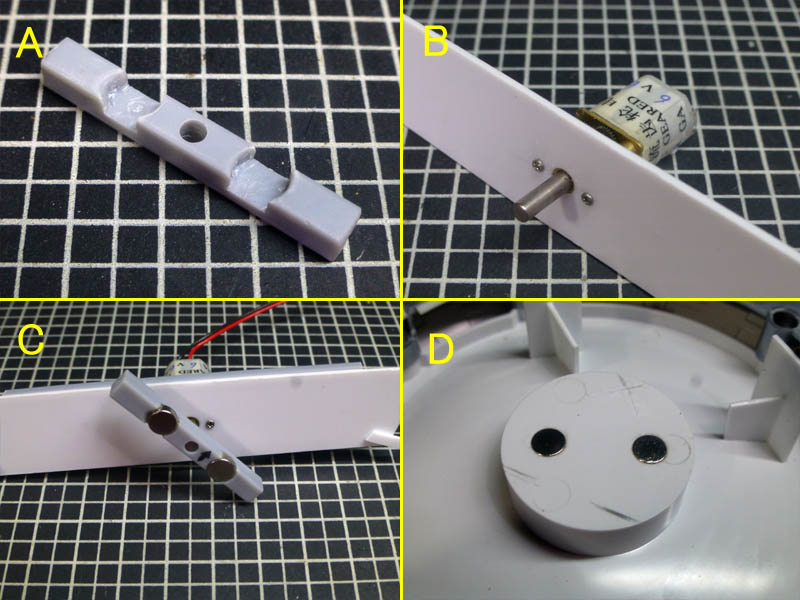
次に、回転軸を作ります。
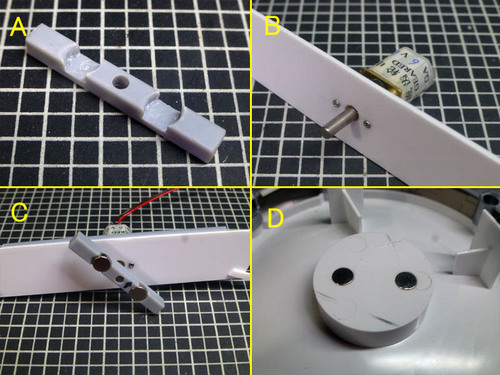
A 回転軸は、モーターと固定しません。
何らかの力が掛かった時、内部の機構が破損してしまうのを予防する事と、
展示会などで子供が手を出した時、ケガをさせてしまわない様に、すぐに
外れる構造にしておきます。
モーターの動力は磁石で伝達する様にします。
5ミリのプラ角棒に穴を掘り、磁石を埋め込める様にしました。
B モーターは、60rpmのギヤードモーターを使います。
プラ板にネジで固定しました。
60rpmでも早過ぎるので、回転速度を落とす必要がありそうです。
C 駆動軸を取り付けました。
プラ板には、プラ角棒を接着して、ゆがみや変形が起きない様に補強して
あります。
D 動かない方の基部にも、磁石を取り付けました。
回転軸は、磁石の力で固定されいて、万が一の時に外れて空回りする構造
になります。
要するに、クラッチですね(^_^;)
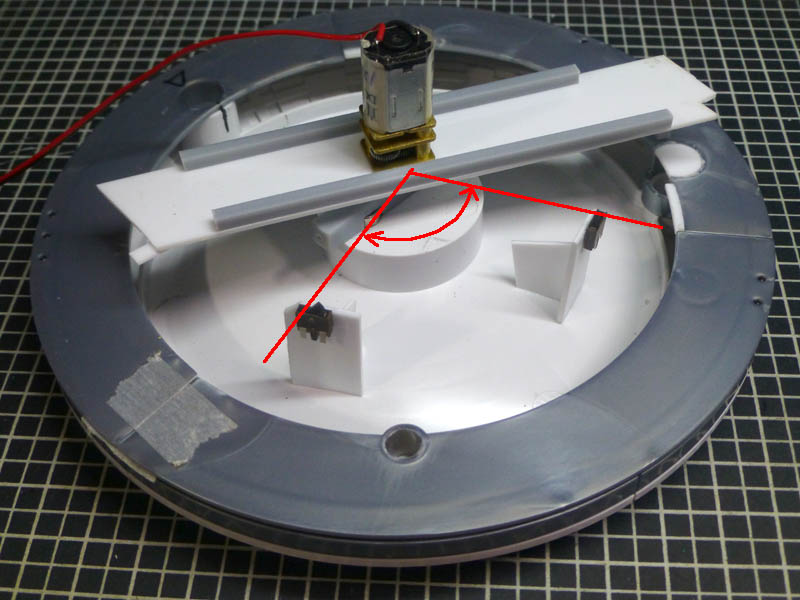
組み合わせてみました。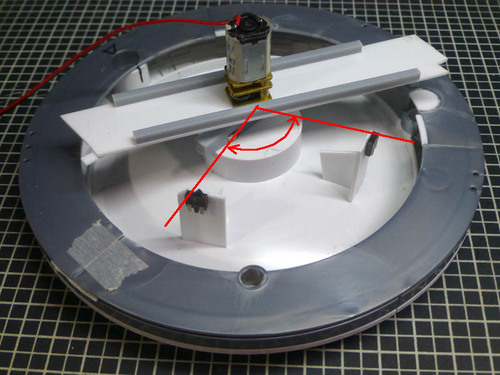
回転するのは、モーターが取り付けられた上側になります。
首は真横まで動かす必要は無いので、左右に30度で動作範囲を決めました。
停止させる位置に、マイクロスイッチを取り付けて、PICマイコンに検知させます。
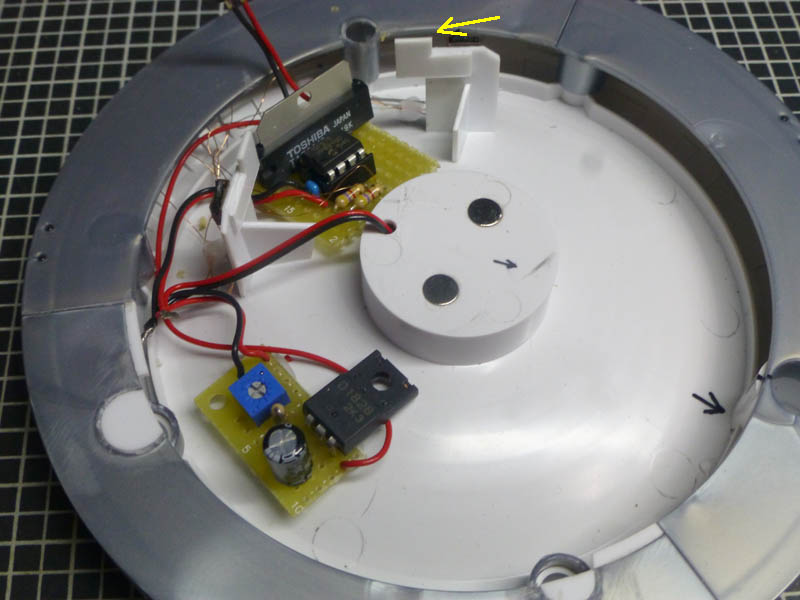
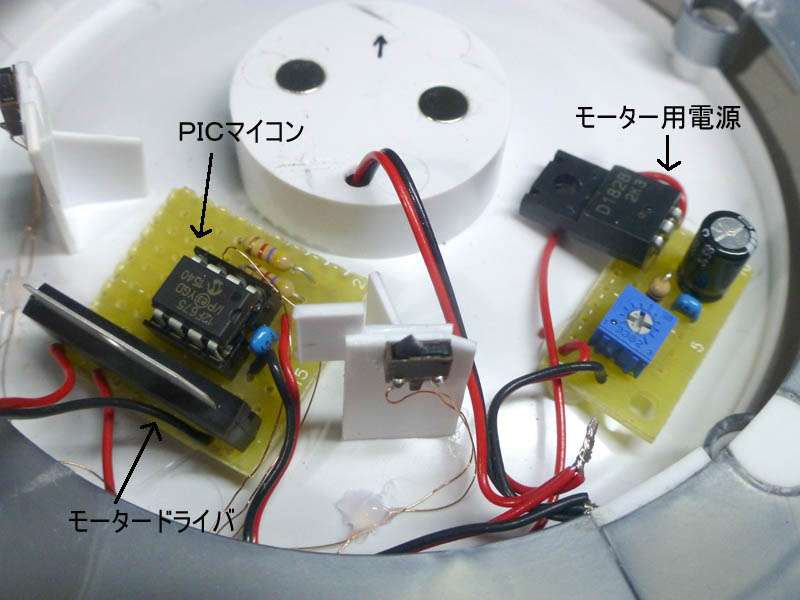
制御回路を組み込みました。
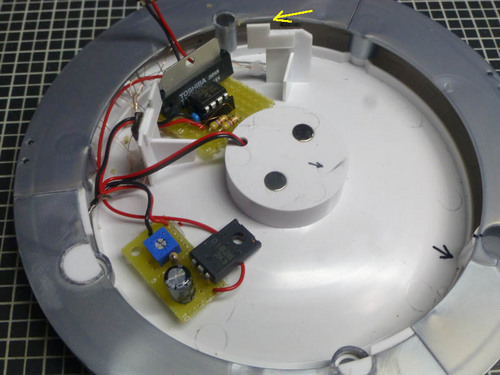
回路は、動作の邪魔にならない様に、出来るだけ可動範囲の外に取り付けています。
念のため、オーバーランしてしまわないように、スイッチの外側にストッパーを付けておきました。
もし、マイクロスイッチの接点に寿命がきても判るようにしています。
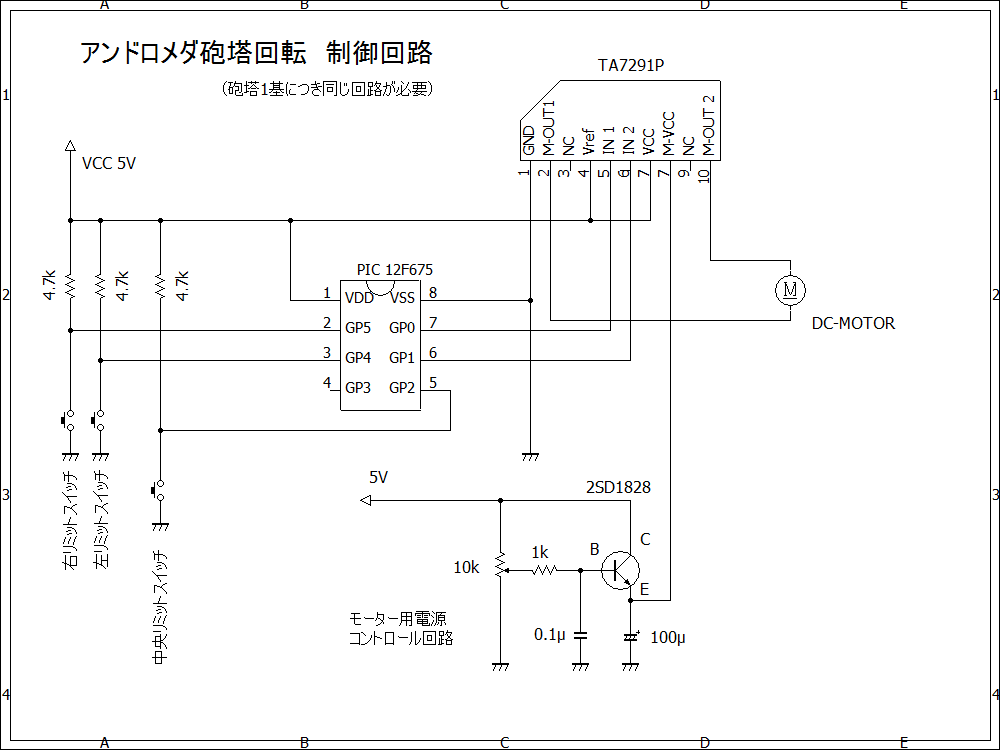
制御回路は、アンドロメダの砲塔旋回の回路をそのまま使いました。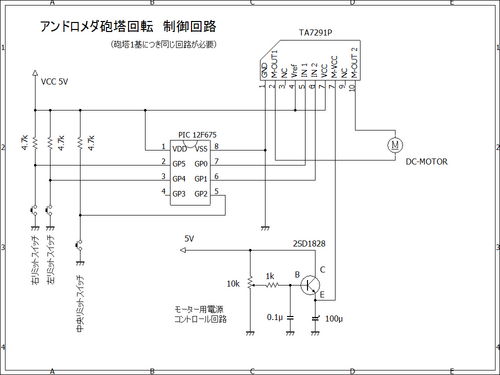
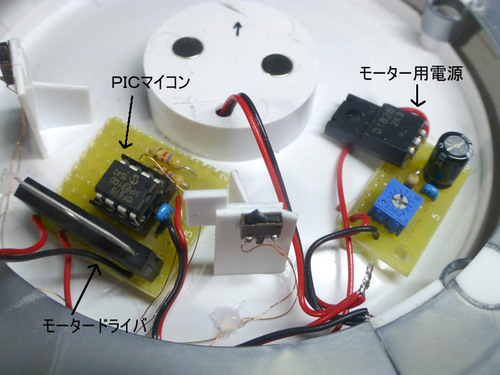
PICマイコン12F675と、モータードライバICTA7291P、それとモーターを減速するための電圧コントローラ回路の構成です。
モーターへの電圧を落とすので、ギヤードモーターのトルクも落ちますが、元々強力なトルクを持ったモーターですので、大きな頭でも余裕で動かせます。
この時点では左右に動かすだけにするつもりでしたが、中央で停止した方がBB-8らしい動きになるので、中央位置にもマイクロスイッチを増設しました。
動く方向やタイミングはランダムで、作ったボクにも次はどちらを向くのか判りません(^_^;)
単調に一定間隔で動くよりも、よりBB-8らしい動きになったと思います。
なんとなく、ボーッと見てしまうんですよね(^_^*)
最後に、頭部を取り付けます。
頭部の中心にモーターの軸が来る位置に微調整しながら、接着しました。
中心の位置は、何本か対角に糸を張れば位置合わせ出来ます。
モーターの電源はコネクタにして、一応取り外し可能にしておきました。
ちなみに、動く頭部には電飾を加えるので、後からコネクタはもっと必要になります(^_^;)
次回は、バーナーやメモリーポケットの製作をご紹介します(^^)/
現在、2つのブログランキングへ参加しています。
1日1回、応援のワンクリックをぜひお願いしますm(__)m


1/2と頭では判っていても、完成するとかなり大きく感じます。
胴体部分は、多角形が組み合わさったフレームがあり、そこへ外装を取り付けていく感じで、同じような形の巨大なパーツがたくさんあります(^_^;)
ちなみに、ダボの形が全て違うので、間違えることはありません。
この構造によって、球体なのに全てのパーツがしっかりと組み合わさります。
普通に考えれば、メルカトル図法のようなパーツ構成を考えると思いますが、色分けと強度が両立されている辺りは、さすがはバンダイですね。
巨大スケールですので、内部には結構な空間もあり、色々と仕込むには都合が良いです。
ただ光らせるだけでは面白く無いので、動いたりしゃべったりするギミックを仕込んでみる事にしました(^^♪
さて、今回は頭部を旋回させる工作です。
始めは胴体にモーターを仕込んで頭全体を旋回させるつもりでしたが、よく見ると頭全体が旋回しているのでは無く、シルバーの帯の上だけが動いているみたいです。
上部分のみ回転できる様に、パーツを加工しました。
オレンジより上が旋回しますが、中心に回転軸を作っただけではブレが出てしまいます。
出来るだけ外縁で回転の邪魔にならない様に、オレンジのパーツにプラ板でガイドを付けました。
どの方向になっても外れないためには、最低でも3箇所にガイドが必要です。
ガイドを受ける側にも、加工が必要です。
本来、パーツを取り付けるためのダボを切り取り、プラ板でフタをして引っ掛からない様にしました。
プラ板のガイドがスムーズに移動出来る様に、僅かな段差も修正しておきます。
実際に、可動する部分を組み合わせてみました。
何度も回転させてみて、引っ掛かる部分が無いかチェック・修正していきます。
とりあえず、ほとんど負荷の無い回転が出来るようになりました。
回転させる時、パーツ同士がスレる音が出てしまうので、ツルツルのテープを貼ったり、金属線を貼り付けてみたりしたのですが、摩擦が大きくなってしまったり、隙間が出来てしまったりして、良い結果になりません(-_-)
結局、音は仕方が無いものとあきらめる事にしました。
次に、回転軸を作ります。
A 回転軸は、モーターと固定しません。
何らかの力が掛かった時、内部の機構が破損してしまうのを予防する事と、
展示会などで子供が手を出した時、ケガをさせてしまわない様に、すぐに
外れる構造にしておきます。
モーターの動力は磁石で伝達する様にします。
5ミリのプラ角棒に穴を掘り、磁石を埋め込める様にしました。
B モーターは、60rpmのギヤードモーターを使います。
プラ板にネジで固定しました。
60rpmでも早過ぎるので、回転速度を落とす必要がありそうです。
C 駆動軸を取り付けました。
プラ板には、プラ角棒を接着して、ゆがみや変形が起きない様に補強して
あります。
D 動かない方の基部にも、磁石を取り付けました。
回転軸は、磁石の力で固定されいて、万が一の時に外れて空回りする構造
になります。
要するに、クラッチですね(^_^;)
組み合わせてみました。
回転するのは、モーターが取り付けられた上側になります。
首は真横まで動かす必要は無いので、左右に30度で動作範囲を決めました。
停止させる位置に、マイクロスイッチを取り付けて、PICマイコンに検知させます。
制御回路を組み込みました。
回路は、動作の邪魔にならない様に、出来るだけ可動範囲の外に取り付けています。
念のため、オーバーランしてしまわないように、スイッチの外側にストッパーを付けておきました。
もし、マイクロスイッチの接点に寿命がきても判るようにしています。
制御回路は、アンドロメダの砲塔旋回の回路をそのまま使いました。
PICマイコン12F675と、モータードライバICTA7291P、それとモーターを減速するための電圧コントローラ回路の構成です。
モーターへの電圧を落とすので、ギヤードモーターのトルクも落ちますが、元々強力なトルクを持ったモーターですので、大きな頭でも余裕で動かせます。
この時点では左右に動かすだけにするつもりでしたが、中央で停止した方がBB-8らしい動きになるので、中央位置にもマイクロスイッチを増設しました。
動く方向やタイミングはランダムで、作ったボクにも次はどちらを向くのか判りません(^_^;)
単調に一定間隔で動くよりも、よりBB-8らしい動きになったと思います。
なんとなく、ボーッと見てしまうんですよね(^_^*)
最後に、頭部を取り付けます。
頭部の中心にモーターの軸が来る位置に微調整しながら、接着しました。
中心の位置は、何本か対角に糸を張れば位置合わせ出来ます。
モーターの電源はコネクタにして、一応取り外し可能にしておきました。
ちなみに、動く頭部には電飾を加えるので、後からコネクタはもっと必要になります(^_^;)
次回は、バーナーやメモリーポケットの製作をご紹介します(^^)/
現在、2つのブログランキングへ参加しています。
1日1回、応援のワンクリックをぜひお願いしますm(__)m
2017-06-01 22:38
コメント(10)

お知らせ~
悪質なリンクを含んだ書き込みが
多発したため、URLを含んだコメント
は書込み出来ない設定にしました。
後了承下さいm(__)m
 「初心者用電飾模型工作入門
電飾しましょっ!」
どろぼうひげ/著 大日本絵画/刊
フルカラー96ページ 定価3,240円
模型を電飾したいけど、難しいのは無理!
何からすれば良いの?という超初心者へ
最短の近道をご案内いたします!
ただ今絶賛発売中です(^^)/
「初心者用電飾模型工作入門
電飾しましょっ!」
どろぼうひげ/著 大日本絵画/刊
フルカラー96ページ 定価3,240円
模型を電飾したいけど、難しいのは無理!
何からすれば良いの?という超初心者へ
最短の近道をご案内いたします!
ただ今絶賛発売中です(^^)/
 「電飾しましょっ!2 PIC編」好評発売中
B5判 88ページ 2500円+税
本書内容に不具合がある箇所についての
正誤表がMODELKASTENにて公開中です
PDFをダウンロードの上、ご活用下さい
正誤表のダウンロードはこちら
「電飾しましょっ!2 PIC編」好評発売中
B5判 88ページ 2500円+税
本書内容に不具合がある箇所についての
正誤表がMODELKASTENにて公開中です
PDFをダウンロードの上、ご活用下さい
正誤表のダウンロードはこちら
 「電飾しましょっ!3 Tips編」
B5判 107ページ 3200円+税
もう光るだけでは物足りない電飾モデラ
ーの皆さんへチョイテクを多数ご紹介!
PICでのモーター制御や調光まで網羅し
た、幅広く電飾を楽しめる一冊です(^^)/
「電飾しましょっ!3 Tips編」
B5判 107ページ 3200円+税
もう光るだけでは物足りない電飾モデラ
ーの皆さんへチョイテクを多数ご紹介!
PICでのモーター制御や調光まで網羅し
た、幅広く電飾を楽しめる一冊です(^^)/
 doro_hige という名前でさえずってます。
フォローよろしくです(^^♪
Follow @doro_hige
doro_hige という名前でさえずってます。
フォローよろしくです(^^♪
Follow @doro_hige
 DORO☆OFFの公式ブログです
展示会のサポートもこちらですよ
DORO☆OFFの公式ブログです
展示会のサポートもこちらですよ
多発したため、URLを含んだコメント
は書込み出来ない設定にしました。
後了承下さいm(__)m
| 「電飾しましょっ!」絶賛発売中! |
「初心者用電飾模型工作入門
電飾しましょっ!」
どろぼうひげ/著 大日本絵画/刊
フルカラー96ページ 定価3,240円
模型を電飾したいけど、難しいのは無理!
何からすれば良いの?という超初心者へ
最短の近道をご案内いたします!
ただ今絶賛発売中です(^^)/
| 「電飾しましょっ!2 PIC編」発売中! |
「電飾しましょっ!2 PIC編」好評発売中
B5判 88ページ 2500円+税
本書内容に不具合がある箇所についての
正誤表がMODELKASTENにて公開中です
PDFをダウンロードの上、ご活用下さい
正誤表のダウンロードはこちら
| 「電飾しましょっ!3 Tips編」発売中! |
「電飾しましょっ!3 Tips編」
B5判 107ページ 3200円+税
もう光るだけでは物足りない電飾モデラ
ーの皆さんへチョイテクを多数ご紹介!
PICでのモーター制御や調光まで網羅し
た、幅広く電飾を楽しめる一冊です(^^)/
| ツイッターやってます |
doro_hige という名前でさえずってます。
フォローよろしくです(^^♪
Follow @doro_hige
| DORO☆OFF公式ブログ |
DORO☆OFFの公式ブログです
展示会のサポートもこちらですよ
模型誌 掲載作品
各模型誌に掲載された作品です
 ModelGraphics No.292 2009.3 に掲載されました。
詳細はカテゴリー「スター・デストロイヤー 製作記」をご覧下さい。
ModelGraphics No.292 2009.3 に掲載されました。
詳細はカテゴリー「スター・デストロイヤー 製作記」をご覧下さい。
 2009.4 キャラクターエイジ VOL.02 に掲載されました。
詳細はカテゴリー「CA掲載ジオラマ制作記」をご覧下さい。
2009.4 キャラクターエイジ VOL.02 に掲載されました。
詳細はカテゴリー「CA掲載ジオラマ制作記」をご覧下さい。
 2009.9 キャラクターエイジ VOL.03 に掲載されました。
詳細はカテゴリー「CA3 エコー基地 製作記」をご覧下さい。
2009.9 キャラクターエイジ VOL.03 に掲載されました。
詳細はカテゴリー「CA3 エコー基地 製作記」をご覧下さい。
 2009.12 ModelGraphix No.302 に掲載されました。
詳細はカテゴリー「FM SnowSpeeder 製作記」をご覧下さい。
2009.12 ModelGraphix No.302 に掲載されました。
詳細はカテゴリー「FM SnowSpeeder 製作記」をご覧下さい。
 2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「CA4 HomeOne 製作記」をご覧下さい。
2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「CA4 HomeOne 製作記」をご覧下さい。
 2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「A-Wing Fighter製作記」をご覧下さい。
2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「A-Wing Fighter製作記」をご覧下さい。
 2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
 2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
 2011.05キャラクターエイジVol.06に掲載
詳細はCA6 1/48 TIE FIGHTER 製作記
をご覧下さい。
ランダム閃光発生回路の説明動画へ
2011.05キャラクターエイジVol.06に掲載
詳細はCA6 1/48 TIE FIGHTER 製作記
をご覧下さい。
ランダム閃光発生回路の説明動画へ
 2012.03 ModelGraphix 2012.04
に掲載させて頂きました。
詳細はNaboo StarFighter 製作記
をご覧下さい。
2012.03 ModelGraphix 2012.04
に掲載させて頂きました。
詳細はNaboo StarFighter 製作記
をご覧下さい。
 2012.11 Scale World Vol.2 に掲載
させて頂きました。
DVD付きで動画も楽しめます(^^)/
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
2012.11 Scale World Vol.2 に掲載
させて頂きました。
DVD付きで動画も楽しめます(^^)/
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
 2013.10 HobbyJapan 2013.11 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
2013.10 HobbyJapan 2013.11 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
 2013.10 ModelGraphix 2013.11に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
詳しい製作記はこちら
2013.10 ModelGraphix 2013.11に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
詳しい製作記はこちら
 2013.11 ModelGraphix 2013.12 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
2013.11 ModelGraphix 2013.12 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
") 2013.12 ModelGraphix 2014.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
製作記はこちら(Build Article Here)
2013.12 ModelGraphix 2014.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
製作記はこちら(Build Article Here)
 2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像と動画が表示されます
2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像と動画が表示されます
 2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
") 2014.04 ModelGraphix 2014.05 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
2014.04 ModelGraphix 2014.05 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 2014.05 ModelGraphix 2014.06 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
2014.05 ModelGraphix 2014.06 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 2014.06 HobbyJapan 2014.07 に
掲載させて頂きました。
バルグレイの完成画像はこちら
デバッケの完成画像はこちら
2014.06 HobbyJapan 2014.07 に
掲載させて頂きました。
バルグレイの完成画像はこちら
デバッケの完成画像はこちら
 2014.08 HobbyJapan 2014.08に
掲載させて頂きました。
シャングリ・ラーの完成画像と動画はこちら
デラメア級の完成画像はこちら
2014.08 HobbyJapan 2014.08に
掲載させて頂きました。
シャングリ・ラーの完成画像と動画はこちら
デラメア級の完成画像はこちら
 ModelGraphix 2014.09 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
ModelGraphix 2014.09 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
 ModelGraphix 2014.11 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix 2014.11 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 HobbyJapan 2015.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
HobbyJapan 2015.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2015.02 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌 2015.02 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 HobbyJapan誌 2015.02 に掲載、更に
作例集”星巡る方舟”編に掲載頂きました
ギミック満載の動画を公開しています
HobbyJapan誌 2015.02 に掲載、更に
作例集”星巡る方舟”編に掲載頂きました
ギミック満載の動画を公開しています

 HobbyJapan誌 2015.03 に掲載。更に
作例集”星巡る方舟”編に掲載頂きました
上の画像クリックで完成画像が表示されます
HobbyJapan誌 2015.03 に掲載。更に
作例集”星巡る方舟”編に掲載頂きました
上の画像クリックで完成画像が表示されます
 ModelGraphix誌2015.05 No.366 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌2015.05 No.366 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2015.08 No.369 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌 2015.08 No.369 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌2015.06 No.367 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌2015.06 No.367 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2015.09 No.370 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌 2015.09 No.370 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 HobbyJapan誌 2015.11 No.557 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
HobbyJapan誌 2015.11 No.557 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2016.01 No.374 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌 2016.01 No.374 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2016.02 No.375 に
掲載させて頂きました。
上の画像クリックで完成画像がが表示されます
ModelGraphix誌 2016.02 No.375 に
掲載させて頂きました。
上の画像クリックで完成画像がが表示されます
 ModelGraphix誌 2016.03 No.376に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
ModelGraphix誌 2016.03 No.376に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
 HobbyJapan誌 2016.03 No.561に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
HobbyJapan誌 2016.03 No.561に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
 ModelArt別冊、艦船模型スペシャル誌
2016 SPRING No.59 に
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
ModelArt別冊、艦船模型スペシャル誌
2016 SPRING No.59 に
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJAPAN誌 2016.04 No.561へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJAPAN誌 2016.04 No.561へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.06 No.564へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.06 No.564へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 ModelGraphix誌 2016.07 No.380 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
ModelGraphix誌 2016.07 No.380 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.07 No.565 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.07 No.565 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.09 No.567 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.09 No.567 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.10 No.568 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.10 No.568 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.11 No.569 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.11 No.569 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.12 No570 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.12 No570 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.02 No.572 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2017.02 No.572 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 ModelGraphix誌 2017.02 No.387 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
ModelGraphix誌 2017.02 No.387 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 ModelGraphix誌 2017.04 No.389 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
ModelGraphix誌 2017.04 No.389 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
完成画像はありません。
上の画像クリックで製作記
が表示されます
HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
完成画像はありません。
上の画像クリックで製作記
が表示されます
| Lot No.S-001 スターデストロイヤー |
ModelGraphics No.292 2009.3 に掲載されました。
詳細はカテゴリー「スター・デストロイヤー 製作記」をご覧下さい。
| Lot No.S-002 ホス&DSトレンチバトル |
2009.4 キャラクターエイジ VOL.02 に掲載されました。
詳細はカテゴリー「CA掲載ジオラマ制作記」をご覧下さい。
| Lot No.S-003 REBEL BASE |
2009.9 キャラクターエイジ VOL.03 に掲載されました。
詳細はカテゴリー「CA3 エコー基地 製作記」をご覧下さい。
| Lot No.S-004 FM SnowSpeeder |
2009.12 ModelGraphix No.302 に掲載されました。
詳細はカテゴリー「FM SnowSpeeder 製作記」をご覧下さい。
| Lot No.S-005 HomeOne |
2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「CA4 HomeOne 製作記」をご覧下さい。
| Lot No.S-006 A-Wing StarFighter |
2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「A-Wing Fighter製作記」をご覧下さい。
| Lot No.S-007 CA5 VC4 シャトル |
2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
| Lot No.S-008 CA5 VC4 スレーブ1 |
2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
| Lot No.S-009 CA6 TIE FIGHTER |
2011.05キャラクターエイジVol.06に掲載
詳細はCA6 1/48 TIE FIGHTER 製作記
をご覧下さい。
ランダム閃光発生回路の説明動画へ
| Lot No.S-010 Naboo StarFighter |
2012.03 ModelGraphix 2012.04
に掲載させて頂きました。
詳細はNaboo StarFighter 製作記
をご覧下さい。
| Lot No.S-011 フジミ SPINNER |
2012.11 Scale World Vol.2 に掲載
させて頂きました。
DVD付きで動画も楽しめます(^^)/
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
| Lot No.S-012 ゲルバデス級 ダロルド |
2013.10 HobbyJapan 2013.11 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
| Lot No.S-013 Viper Mk.Ⅱ |
2013.10 ModelGraphix 2013.11に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
詳しい製作記はこちら| Lot No.S-014 次元潜航艦 UX-01 |
2013.11 ModelGraphix 2013.12 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
| Lot No.S-015 BS GALACTICA |
2013.12 ModelGraphix 2014.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
製作記はこちら(Build Article Here) | Lot No.S-016 ヤマト2199 |
2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像と動画が表示されます
| Lot No.S-017 シュデルグ |
2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-018 BS PEGASUS |
2014.04 ModelGraphix 2014.05 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-019 ギガント |
2014.05 ModelGraphix 2014.06 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-020 バルグレイ |
2014.06 HobbyJapan 2014.07 に
掲載させて頂きました。
バルグレイの完成画像はこちら
デバッケの完成画像はこちら
| Lot No.S-021 シャングリ・ラー |
2014.08 HobbyJapan 2014.08に
掲載させて頂きました。
シャングリ・ラーの完成画像と動画はこちら
デラメア級の完成画像はこちら
| Lot No.S-022 AU-O9 アナライザー |
ModelGraphix 2014.09 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
| Lot No.S-023 ドメラーズⅢvsヤマト |
ModelGraphix 2014.11 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-024 N-ノーチラス号 |
HobbyJapan 2015.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-025 X-WING RED 3 |
ModelGraphix誌 2015.02 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-026 1/500 ヤマト2199 |
 HobbyJapan誌 2015.02 に掲載、更に
作例集”星巡る方舟”編に掲載頂きました
ギミック満載の動画を公開しています
HobbyJapan誌 2015.02 に掲載、更に
作例集”星巡る方舟”編に掲載頂きました
ギミック満載の動画を公開しています
| Lot No.S-027 ミランガル |
HobbyJapan誌 2015.03 に掲載。更に
作例集”星巡る方舟”編に掲載頂きました
上の画像クリックで完成画像が表示されます
| Lot No.S-028 AT-ST |
ModelGraphix誌2015.05 No.366 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-029 バラクーダ号 |
ModelGraphix誌 2015.08 No.369 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-030 1/48 X-WING |
ModelGraphix誌2015.06 No.367 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-031 Y-WING GOLD2 |
ModelGraphix誌 2015.09 No.370 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-032 マクロス要塞艦 |
HobbyJapan誌 2015.11 No.557 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-033 EP.Ⅶ ファルコン |
ModelGraphix誌 2016.01 No.374 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-034 グフカスタム |
ModelGraphix誌 2016.02 No.375 に
掲載させて頂きました。
上の画像クリックで完成画像がが表示されます
| Lot No.S-035 ハンタキラータンク |
ModelGraphix誌 2016.03 No.376に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
| Lot No.S-036 メカコレ ヤマト・ランベア |
HobbyJapan誌 2016.03 No.561に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
| Lot No.S-037 護衛艦あきづき |
ModelArt別冊、艦船模型スペシャル誌
2016 SPRING No.59 に
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-038 アスタコNEO |
HobbyJAPAN誌 2016.04 No.561へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-039 VM スタデ&X-WING |
HobbyJapan誌 2016.06 No.564へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-040 バンダイ A-WING |
ModelGraphix誌 2016.07 No.380 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-041 サンダーバード 2・4 号 |
HobbyJapan誌 2016.07 No.565 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-042 はしご付き消防車 |
HobbyJapan誌 2016.09 No.567 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-043 VM Poe'sX & FO TIE |
HobbyJapan誌 2016.10 No.568 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-044 マクロスエリシオン |
HobbyJapan誌 2016.11 No.569 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-045 VM Y-WING |
HobbyJapan誌 2016.12 No570 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-046 VM ファルコン |
HobbyJapan誌 2017.02 No.572 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-047 R.o. X-WING RED1 |
ModelGraphix誌 2017.02 No.387 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-048 VM タイセット |
HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-049 U-WING & タイセット |
HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-050 FMタイガーモス |
ModelGraphix誌 2017.04 No.389 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-051 アンドロメダ2202 |
HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-052 レイズナーヘッド |
HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
完成画像はありません。
上の画像クリックで製作記
が表示されます
製作記 STAR WARS 作品
| Lot No.001 ミレニアム・ファルコン |

| Lot No.003 SLAVE 1 |

| Lot No.004 X-WING |

| Lot No.007 シャトル・タイデリアム |
 2007-06-06 完成しました。
完成画像はこちら
カテゴリー「シャトル・タイデリアム製作記」
2007-06-06 完成しました。
完成画像はこちら
カテゴリー「シャトル・タイデリアム製作記」
| Lot No.011 Y-Wing |
 2007-08-21 完成しました。
完成画像はこちら
カテゴリー「Y-Wing製作記」
2007-08-21 完成しました。
完成画像はこちら
カテゴリー「Y-Wing製作記」
| Lot No.012 スター・デストロイヤー |
 2008-05-19 完成しました。
「模型誌掲載作品」へ移動しました。
2008-05-19 完成しました。
「模型誌掲載作品」へ移動しました。
| Lot No.014 JEDI STAR FIGHTER |
 2008-06-28 完成しました。
完成画像はこちら
カテゴリー「JEDI STAR FIGHTER 製作記」
2008-06-28 完成しました。
完成画像はこちら
カテゴリー「JEDI STAR FIGHTER 製作記」
| Lot No.016 mpc AT-AT |
 2008-09-06 完成しました。
完成画像はこちら
カテゴリー「mpc AT-AT 製作記」
2008-09-06 完成しました。
完成画像はこちら
カテゴリー「mpc AT-AT 製作記」
| Lot No.017 TIE INTERCEPTOR |
 2008-10-10 完成しました。
完成画像はこちら
2008-10-10 完成しました。
完成画像はこちら
| Lot No.018 Deth Star Surface |
 2008-10-27 完成しました。
完成画像はこちら
2008-10-27 完成しました。
完成画像はこちら
| Lot No.019 A-Wing Fighter |
 2008.12.16 完成しました。。
完成画像はこちら
カテゴリー「A-Wing Fighter 製作記」
2008.12.16 完成しました。。
完成画像はこちら
カテゴリー「A-Wing Fighter 製作記」
| Lot No.022 1/48 X-Wing Fighter |
 2009-05-15 完成しました。
完成画像はこちら
2009-05-15 完成しました。
完成画像はこちら| Lot No.027 FM 1/144 Falcon |
 2010.08.20 完成しました。
完成画像はこちら
カテゴリー「FM 144ファルコン 製作記」
2010.08.20 完成しました。
完成画像はこちら
カテゴリー「FM 144ファルコン 製作記」
| Lot No.031 VC4 スターデストロイヤー |
 完成画像はこちら
カテゴリー「VC4 スター・デストロイヤー 製作記」
完成画像はこちら
カテゴリー「VC4 スター・デストロイヤー 製作記」
| Lot No.021 Death Star Ⅱ |
 デススターⅡをフルスクラッチしました。
完成画像はこちら
製作過程を交えた完成ムービーはこちら
カテゴリー「Death Star Ⅱ 製作記」
デススターⅡをフルスクラッチしました。
完成画像はこちら
製作過程を交えた完成ムービーはこちら
カテゴリー「Death Star Ⅱ 製作記」
製作記 スタジオジブリ 作品







製作記 キャラクターもの
| Lot No.002 頭文字Dトレノ |

| Lot No.008 ザク Ver2.0 |
 2007-06-22 完成しました。
完成画像はこちら
カテゴリー「ザクVer2.0製作記」では、制作過程を紹介しています。
2007-06-22 完成しました。
完成画像はこちら
カテゴリー「ザクVer2.0製作記」では、制作過程を紹介しています。
| Lot No.015 AVP2エイリアン リペイント |
 2008-07-05 完成しました。
完成画像はこちら
カテゴリー「ALIEN リペイント」では、制作過程を紹介しています。
2008-07-05 完成しました。
完成画像はこちら
カテゴリー「ALIEN リペイント」では、制作過程を紹介しています。
| Lot No.023 アオシマ T-800 |
 2009-09-07 完成しました。
完成画像はこちら
首の電動化の動画はこちら
2009-09-07 完成しました。
完成画像はこちら
首の電動化の動画はこちら
| Lot No.024 MGアイマス機 双海真美 |
 2009-12-20 完成しました。
完成画像はこちら
2009-12-20 完成しました。
完成画像はこちら
| Lot No.026 Ma.K ポーラーベアー |
 2010-05-04 完成しました。
完成画像はこちら
2010-05-04 完成しました。
完成画像はこちら
| Lot No.028 ロボコップ ED-209 |
 2010-10-02 完成しました。
完成画像はこちら
2010-10-02 完成しました。
完成画像はこちら
| Lot No.034 Ma.k.クレーテ |
 完成画像はこちら
完成画像はこちら
| Lot No.035 LBX パンドラ |
 完成画像はこちら
完成画像はこちら
| Lot No.037 フジミ SPINNER |
 2012-08-30 完成しました。
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
2012-08-30 完成しました。
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
| Lot No.038 ごあいさつダンボー |
 上の画像クリックで製作記と動画へGo
上の画像クリックで製作記と動画へGo
| Lot No.041 LastExile ヴァンシップ |
 2013-03-03 完成しました。
画像クリックで完成画像と動画へGo
2013-03-03 完成しました。
画像クリックで完成画像と動画へGo
| Lot No.043 デコトラ「天下御免」 |
 2013.1頃に完成しています
画像クリックで完成画像と動画へGo
2013.1頃に完成しています
画像クリックで完成画像と動画へGo
製作記 宇宙船など
| Lot No.005 コスモゼロ |
 2007-03-03 完成しました。
完成画像はこちら
2007-03-03 完成しました。
完成画像はこちら
| Lot No.006 ブラックタイガー |
 2007-03-12 完成しました♪
完成画像はこちら
2007-03-12 完成しました♪
完成画像はこちら
| Lot No.009 BIRD OF PREY |
 2007-07-08 完成しました♪
完成画像はこちら
2007-07-08 完成しました♪
完成画像はこちら
| Lot No.045 メカコレヤマト2199 |
 2014-05-31 完成しました♪
完成画像と発射の動画はこちら
2014-05-31 完成しました♪
完成画像と発射の動画はこちら
| Lot No.010 ノストロモ号 |
 2005-12-18 完成しました♪
完成画像はこちら
2005-12-18 完成しました♪
完成画像はこちら
| Lot No.013 たまごスペースシャトル |
 2008-06-05 完成しました♪
完成画像はこちら
2008-06-05 完成しました♪
完成画像はこちら
| Lot No.025 DVD特典 宇宙戦艦ヤマト |
 2010-04-05 完成しました。
完成画像はこちら
2010-04-05 完成しました。
完成画像はこちら
| Lot No.033 Space Clipper |
 2012-02-13 完成しました。
完成画像はこちら
2012-02-13 完成しました。
完成画像はこちら
| Lot No.039 アルカディア号 |
 1012-11-20完成しました。
完成画像はこちら
1012-11-20完成しました。
完成画像はこちら| Lot No.048 シルフィード |
 16BitModels用として製作しました
2017.09完成しました。
16BitModels用として製作しました
2017.09完成しました。

今、このブログを見てBB-8を作っていますが、まだC言語のことがよく分からないので首を回すためのプログラムを教えていただけないでしょうか。よろしくお願いします。
by star wars (2019-02-15 18:09)
star wars さん、こんにちは^^
参考にして頂き、ありがとうございます!
でも、C言語は奥が深く、このコメント欄だけでは到底説明できるものではありません。
また、プログラムだけわかっても、それをコンパイルしたり、書き込んだりしないと使えないものです。
もし良かったら「電飾しましょっ!2PIC編」を、ぜひご一読下さい。
by どろぼうひげ (2019-02-17 17:10)
PIC12F675の初期設定を教えて頂けないでしょうか。お願いします。
by BB-8 (2019-03-18 20:27)
BB-8 さん、こんにちは
お使いの環境がわかりませんので、MPLABX IDE + XC8 と仮定してお答えします。
// CONFIG
#pragma config FOSC = INTRCIO // Oscillator Selection bits (INTOSC oscillator: I/O function on GP4/OSC2/CLKOUT pin, I/O function on GP5/OSC1/CLKIN)
#pragma config WDTE = OFF // Watchdog Timer Enable bit (WDT disabled)
#pragma config PWRTE = ON // Power-Up Timer Enable bit (PWRT enabled)
#pragma config MCLRE = OFF // GP3/MCLR pin function select (GP3/MCLR pin function is digital I/O, MCLR internally tied to VDD)
#pragma config BOREN = ON // Brown-out Detect Enable bit (BOD enabled)
#pragma config CP = OFF // Code Protection bit (Program Memory code protection is disabled)
#pragma config CPD = OFF // Data Code Protection bit (Data memory code protection is disabled)
// #pragma config statements should precede project file includes.
// Use project enums instead of #define for ON and OFF.
#include <xc.h>
#define _XTAL_FREQ 4000000
void main(void) {
OPTION_REG = 0b00000010 ;
CMCON = 0b00000111 ;
ADCON0 = 0;
ANSEL = 0b00000000 ;
TRISIO = 0b00001000 ;
WPU = 0b00000000 ;
GPIO = 0b00000000 ;
while(1){
//ここにプログラムを書きます
}
}
by どろぼうひげ (2019-03-19 13:38)
初期設定参考にさせていただきました!
プログラムの方なんですが、どのようなプログラムにしたら 真ん中あたりで止まったり、首を振ったりするのでしょうか。また、もし良ければプログラムの部分も公開してもらえないでしょうか。とても無理矢理なんですがよろしくお願いします。
by BB-8 (2019-05-17 20:24)
BB-8さん、こんばんは
お役に立てて良かったです
プログラムや、動作の仕組みについては、こちらのコメントで説明できるようなボリュームではありません。
プログラムを掲載することも、サポート出来ない以上、出来るだけ公開しないでおこうと思っています。
個本的な動作の仕組みは、自著「電飾しましょっ2PIC編」でご紹介しておりますので、是非そちらをご参照下さい。
by どろぼうひげ (2019-05-19 20:36)
上のテンプレート使わせて頂きました〜。ありがとうございます
by C言語初心者 (2020-03-07 16:24)
質問なんですが、このプログラムは時間を乱数でランダムにしてるのでしょうか?あと、プログラムでモーターの+とーを逆にする方法はあるのでしょうか?教えてください〜!!
お忙しいところすみません
by C言語初心者 (2020-03-07 16:26)
初期設定がお役に立てて良かったです。
プログラムは、ランダム関数を使って、動くタイミングを調整しています。
ボク自身も、いつどちらへ動くのかわかりません^^
モーターの正転・逆転には、回路図にあるTA7291PというモータードライバICを使っています。
by どろぼうひげ (2020-03-08 10:28)
ありがとうございます‼︎
by C言語初心者 (2020-03-08 11:27)