カメラアイの電動化 [サクラ大戦 光武 製作記]
2018年4月14日 コトブキヤ秋葉原館5Fにて、第3回16bitModels展示会が開催されました。

レトロなゲームを題材として、多数のモデラーが作品を展示するワクワクな展示会ですが、去年は多忙のために参加を断念していたため、今年は気合を入れて製作させて頂きました。
今年のテーマは「SEGA」という事で、真っ先に思い浮かんだのは、名作「サクラ大戦」!
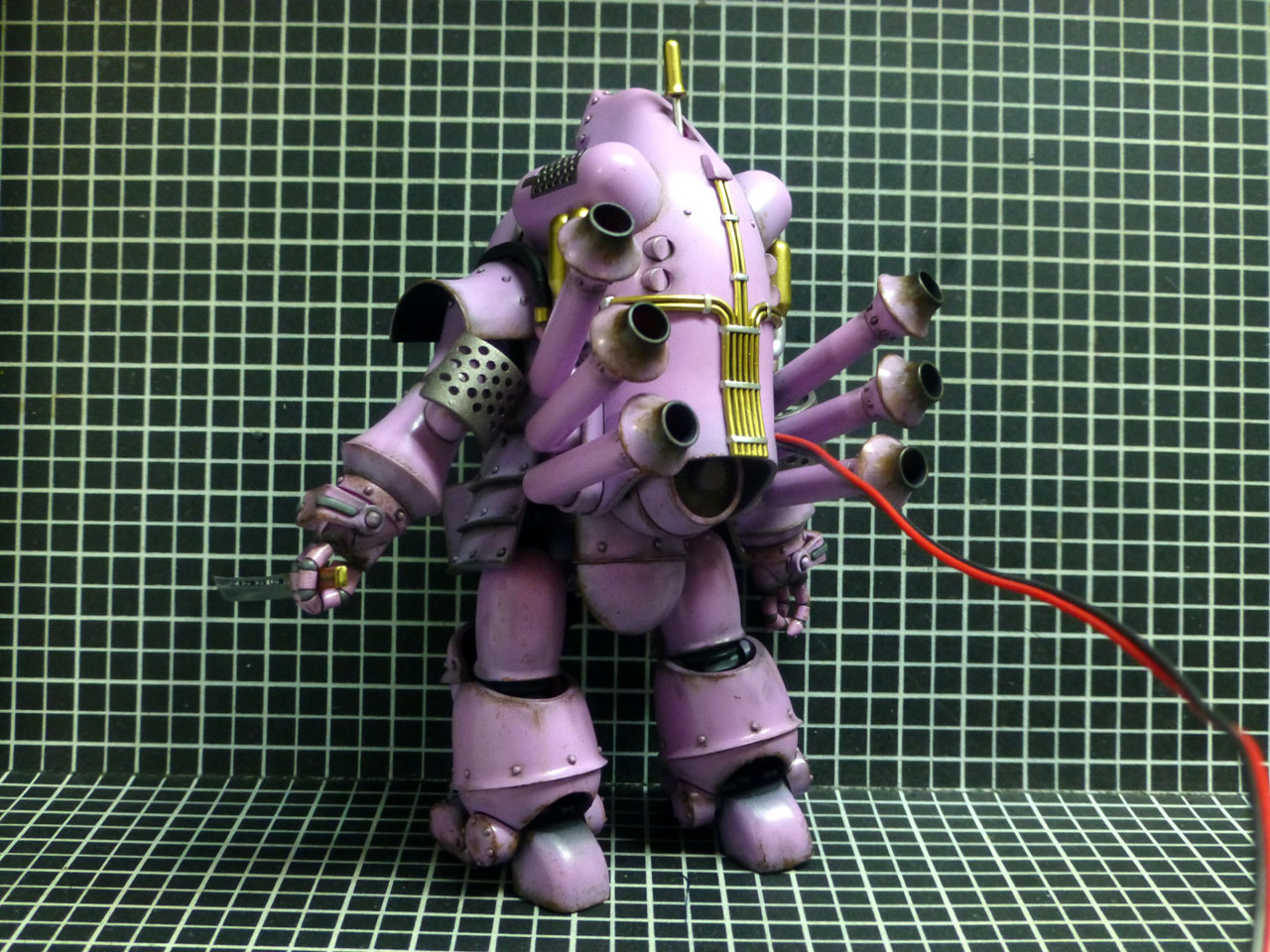
waveさんから発売されていた「光武・改」を製作してみました。
ツイッターで製作過程をツイートしていましたが、ありがたいことにとても好評でしたので、こうしてブログでも製作記として公開することになりましたとさ(^_^*)
かなり古いキットですが、仮組みしてみるとプロポーションは良好です。
細部まで忠実に再現されていて、ほとんどいじる部分はなさそうです。

適度に合わせ目処理が必要な部分があるので、プラモ製作そのものを楽しむ事ができるキットですね。
キットには、真宮寺さくらのフィギュアも付属しており、なんと原型は林浩己さん。
前後抜きなのでご苦労されたとの事ですが、そんな事は微塵も感じさせない見事な造型で、修正すべき部分は全くありません。

頑張って塗装してみました(^_^*)

金色の部分を残してつや消しでトップコートしてから、ブルーゴールドを筆塗りする事で、キラキラ感を残した仕上げにしています。
長いリボンをプラペーパーで追加してみましたが、これがあるともっとサクラちゃんらしくなりますのでお勧めです。
さて、今回は電飾よりも動く模型に注力してみたいと思います。
来場者のみなさんに楽しんでもらうには、ただ光るだけでは物足りないかな?と思ったもので、ちょっとだけ背伸びしてみます(^_^*)
まずはカメラアイですが、光武には上下にチュッパチャップス(?)みたいなカメラアイが2基あり、グリングリン動くんですよね。
これを電動で動かしてみたいと思います。
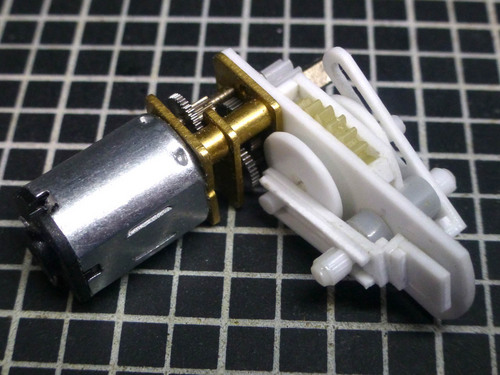
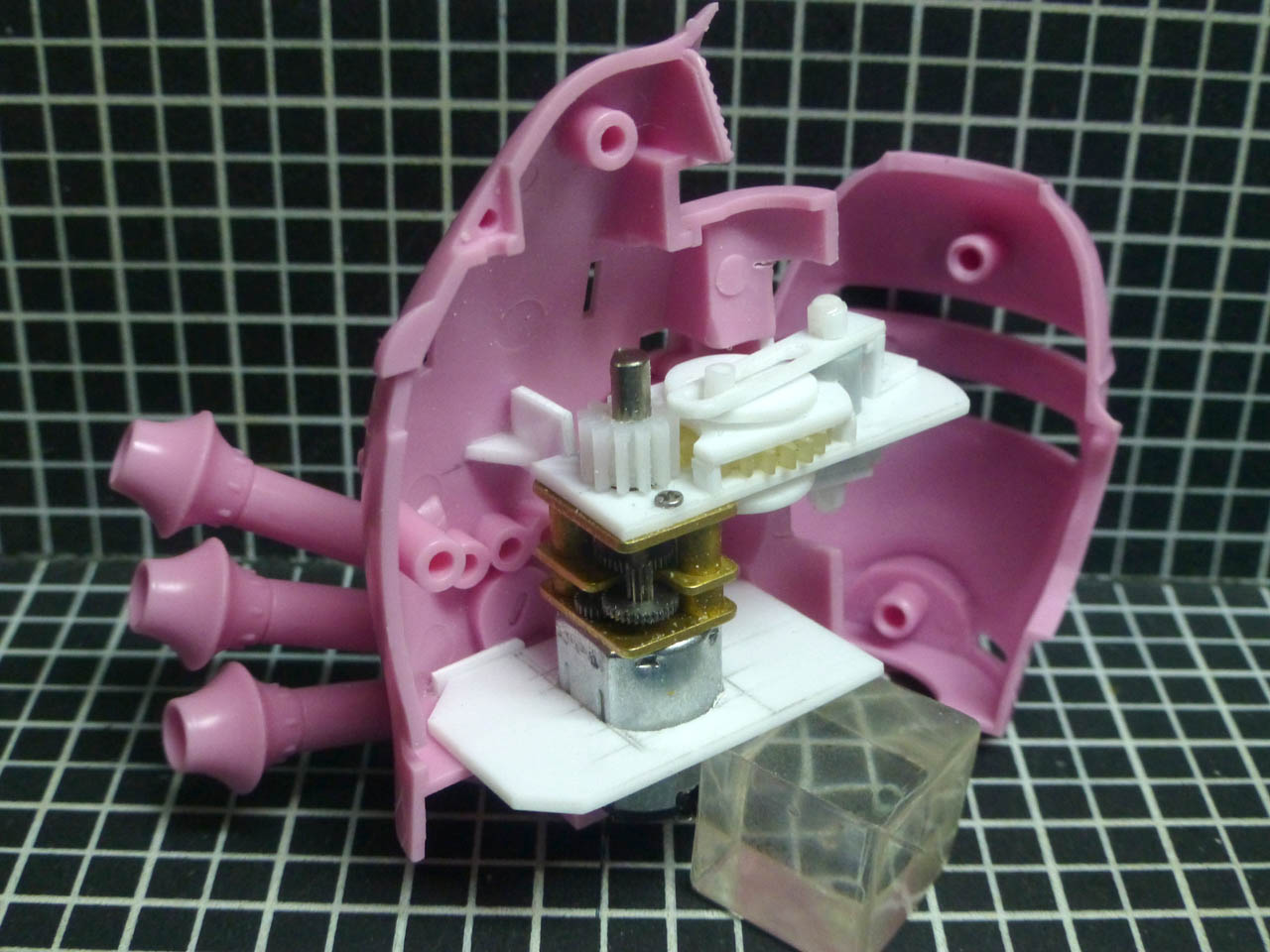
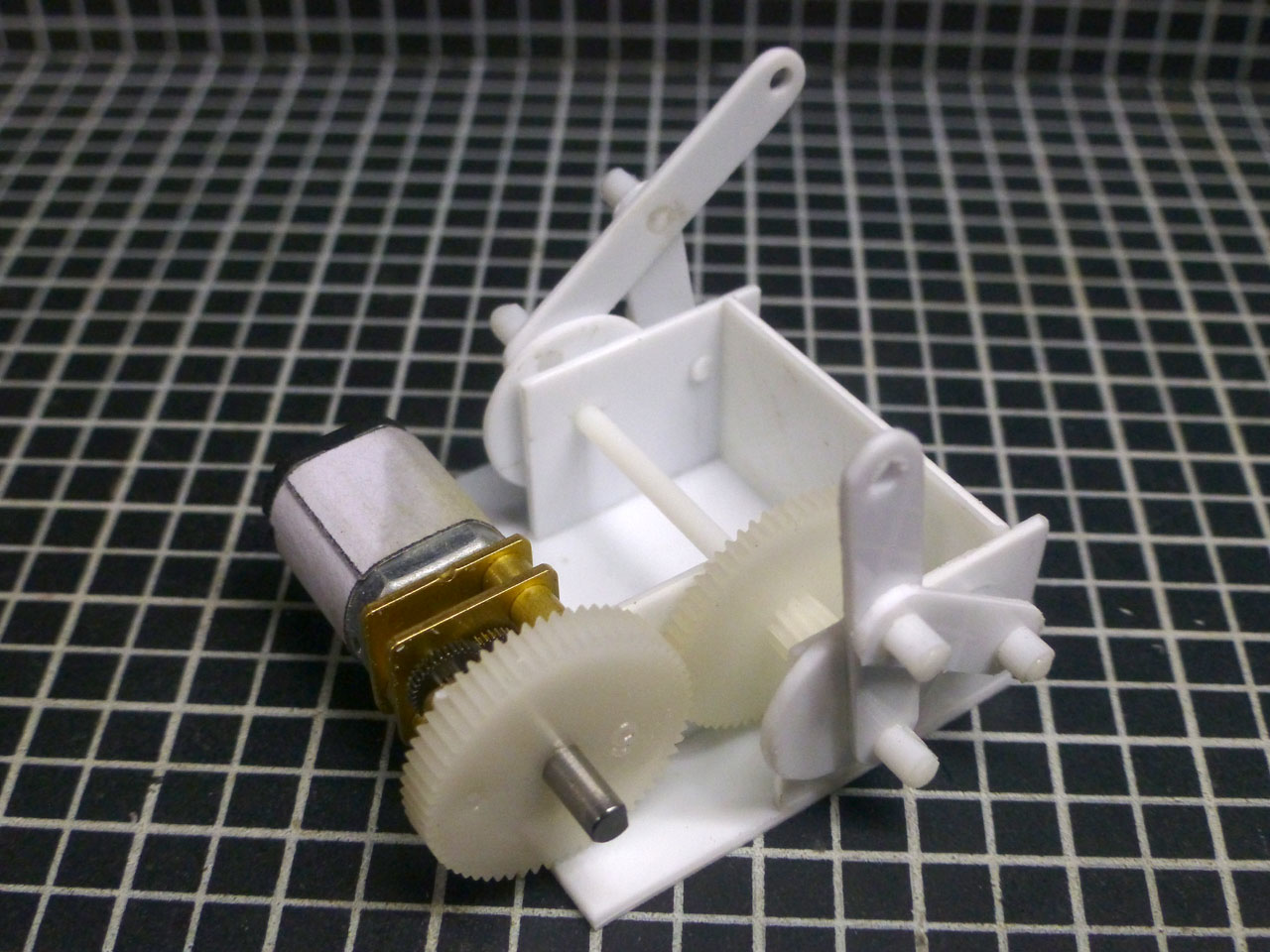
60rpmのギヤードモーターに歯車を取り付け、カムとクランクを組み合わせて、左右に動くリンク機構を製作してみました。
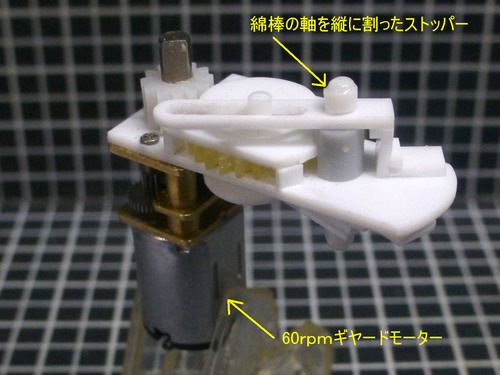
本体の内部に収めるために、出来るだけコンパクトに製作しています。
リンクは上下にあって、2基のカメラアイを同時に動かします。
映像では、まるで生き物のようにニュルン!と動きますので、カムの位置を微妙にズラして、同じ動きにならないようにしてみました。
左へ動く時と、右へ動く時にはスピードが違いますので、より映像に近い動きを再現できたと思います。
実際の動作の様子は、動画でご覧下さい。
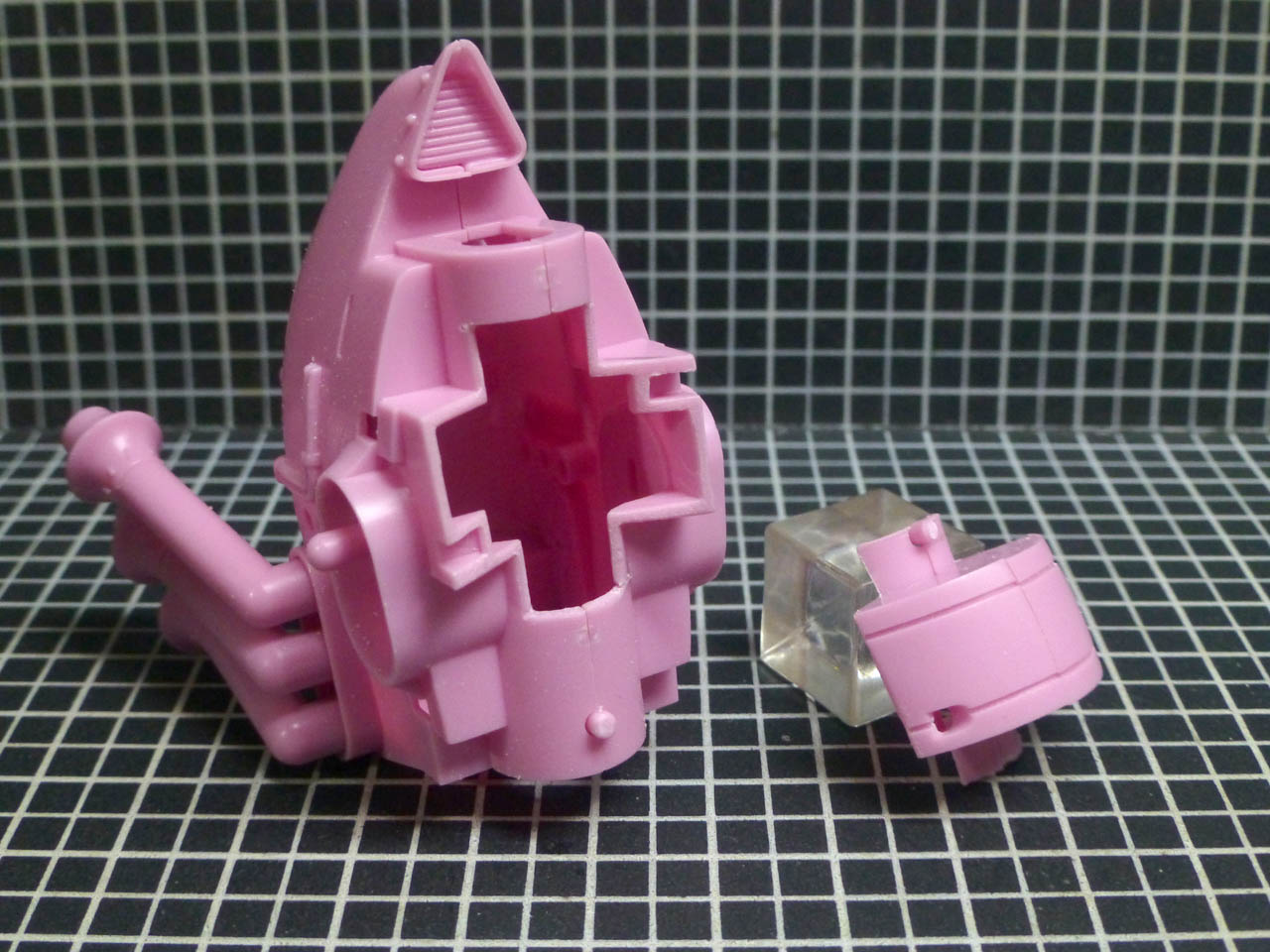
このリンク機構を内部に収めるため、前面カバーの裏になる部分を切り取ります。
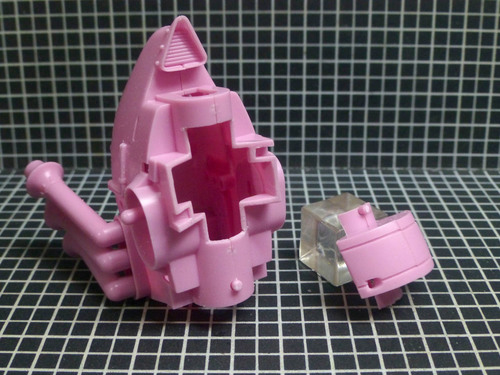
本体は左右貼り合わせで、合わせ目処理をしなくてはならないため、接着してしまうとリンク機構へアクセス出来なくなります。
グリスアップ等が後から可能になる様に、出来るだけ大きく開口しています。
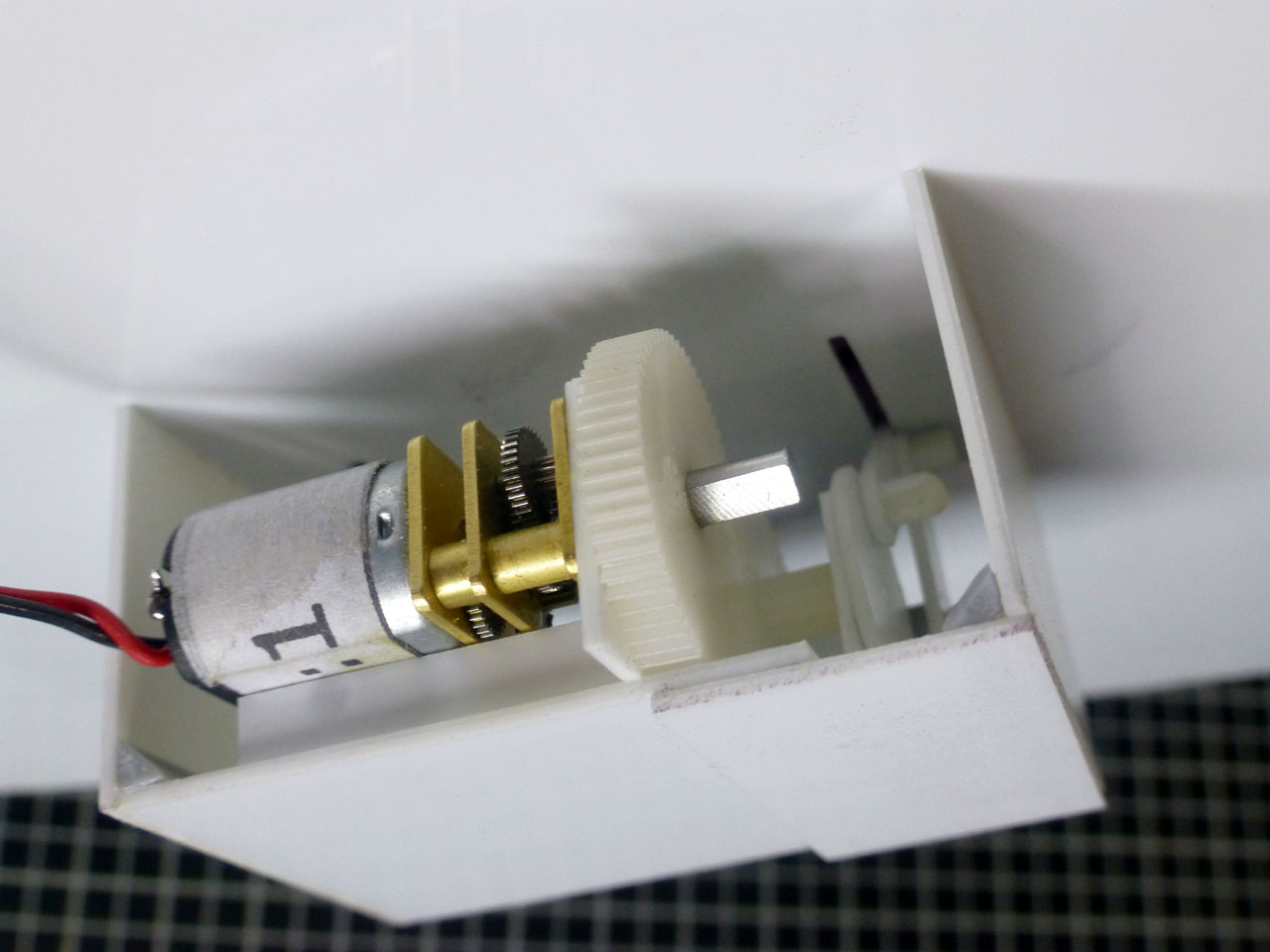
内部に収めると、こんな感じ。
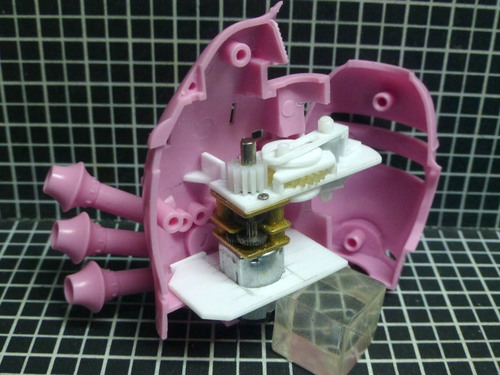
モーターやリンク機構を固定するために、プラ板で支えを作ってあげる必要があります。
動くものを製作する場合、固定することは割と重要で、騒音や故障を防ぐために手を抜けない部分です。
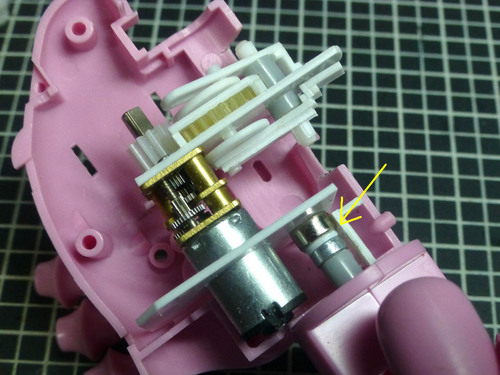
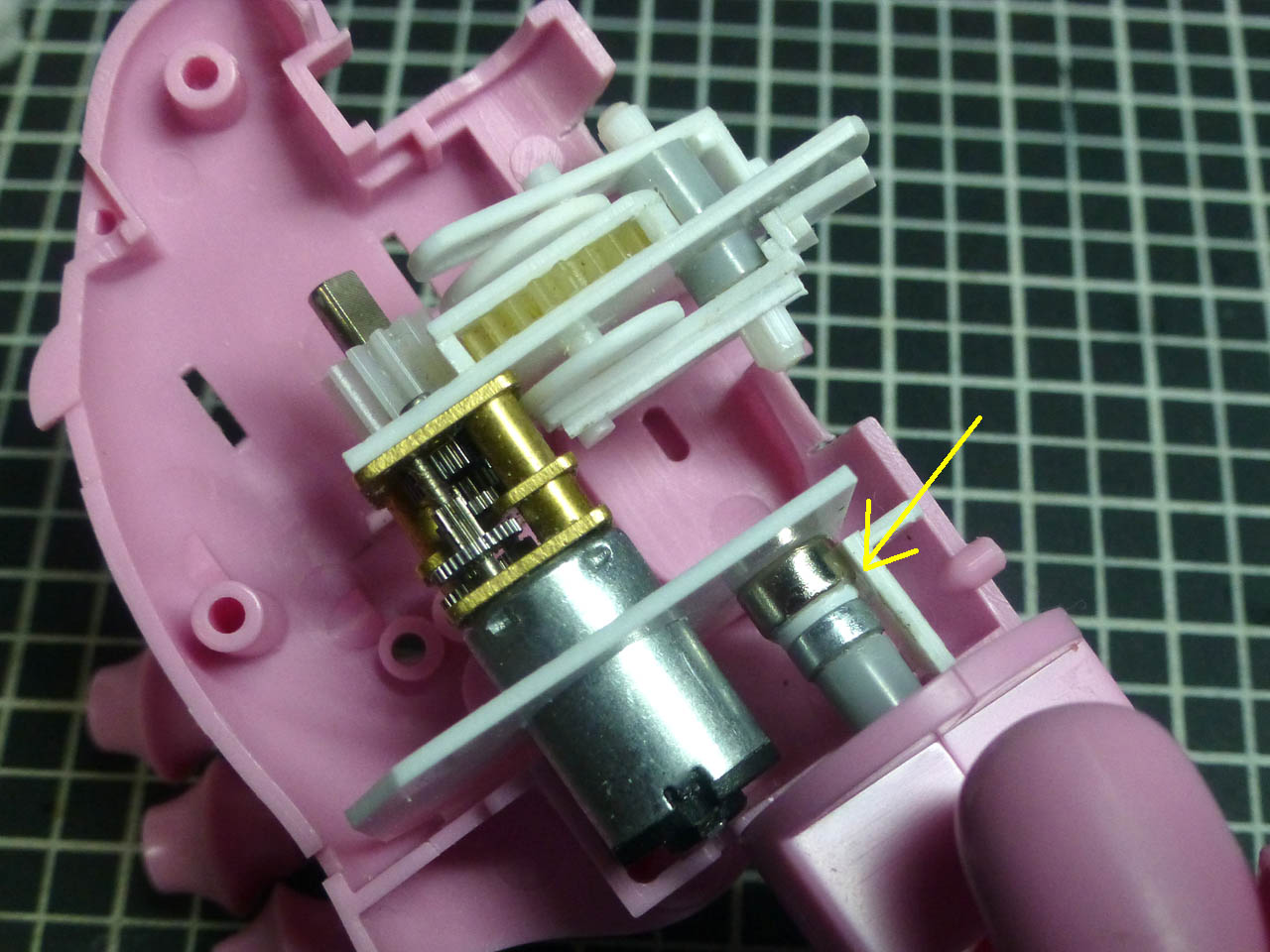
後程記事にしますが、歩行させる仕掛けも作りますので、本体を閉じる前に腰が回転する仕組みも組み込んでおきます。
磁石で接続させて、自由に動くようにしているだけですが、これが後程スムーズな動きのために役に立ってくれました。
カメラアイは、動きながら発光もして欲しいです。
しかも、カバーを外す時に、取り外す事も出来るようにしなくてはなりません。
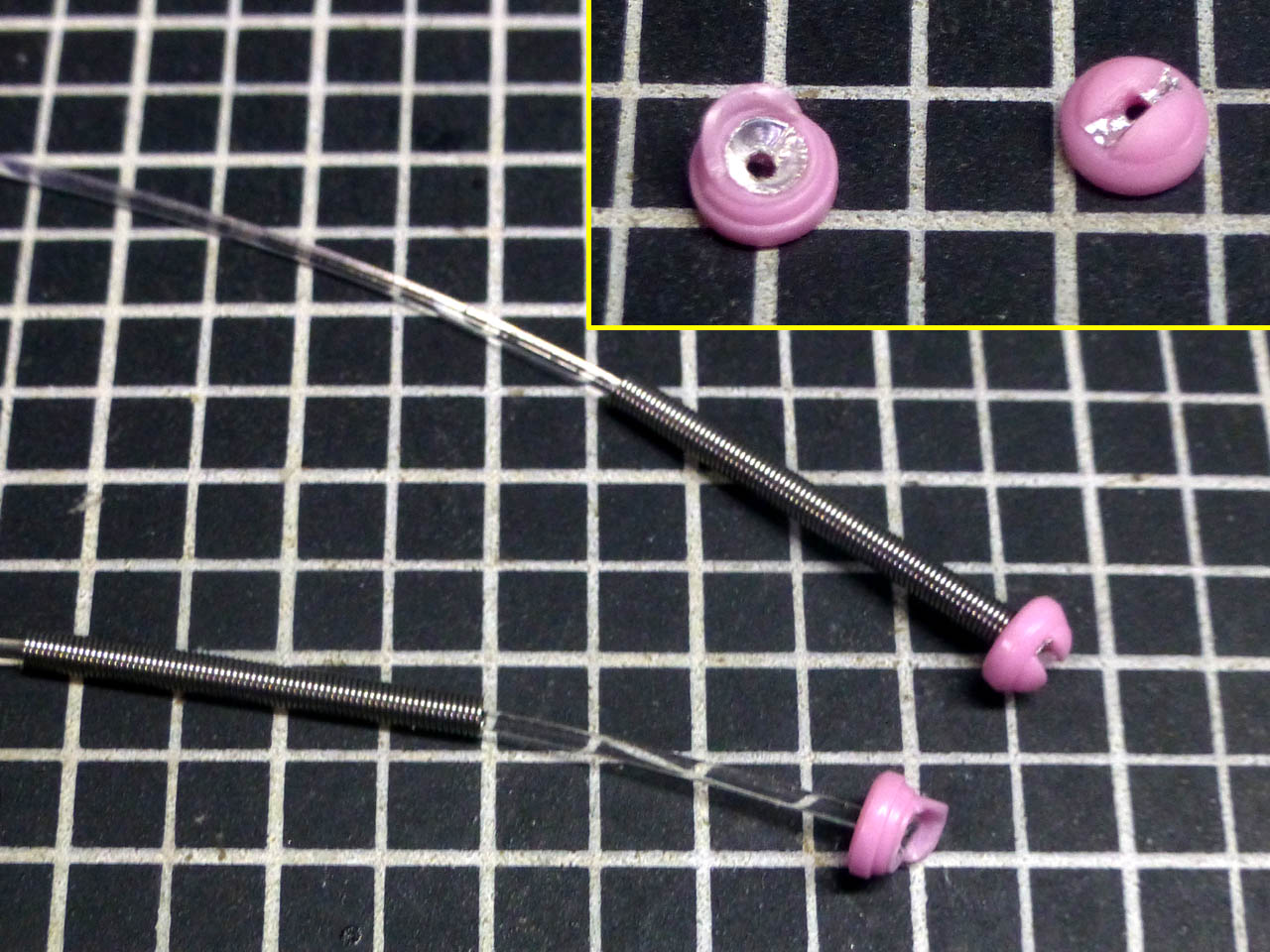
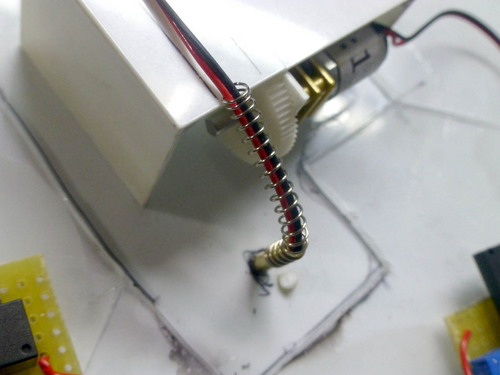
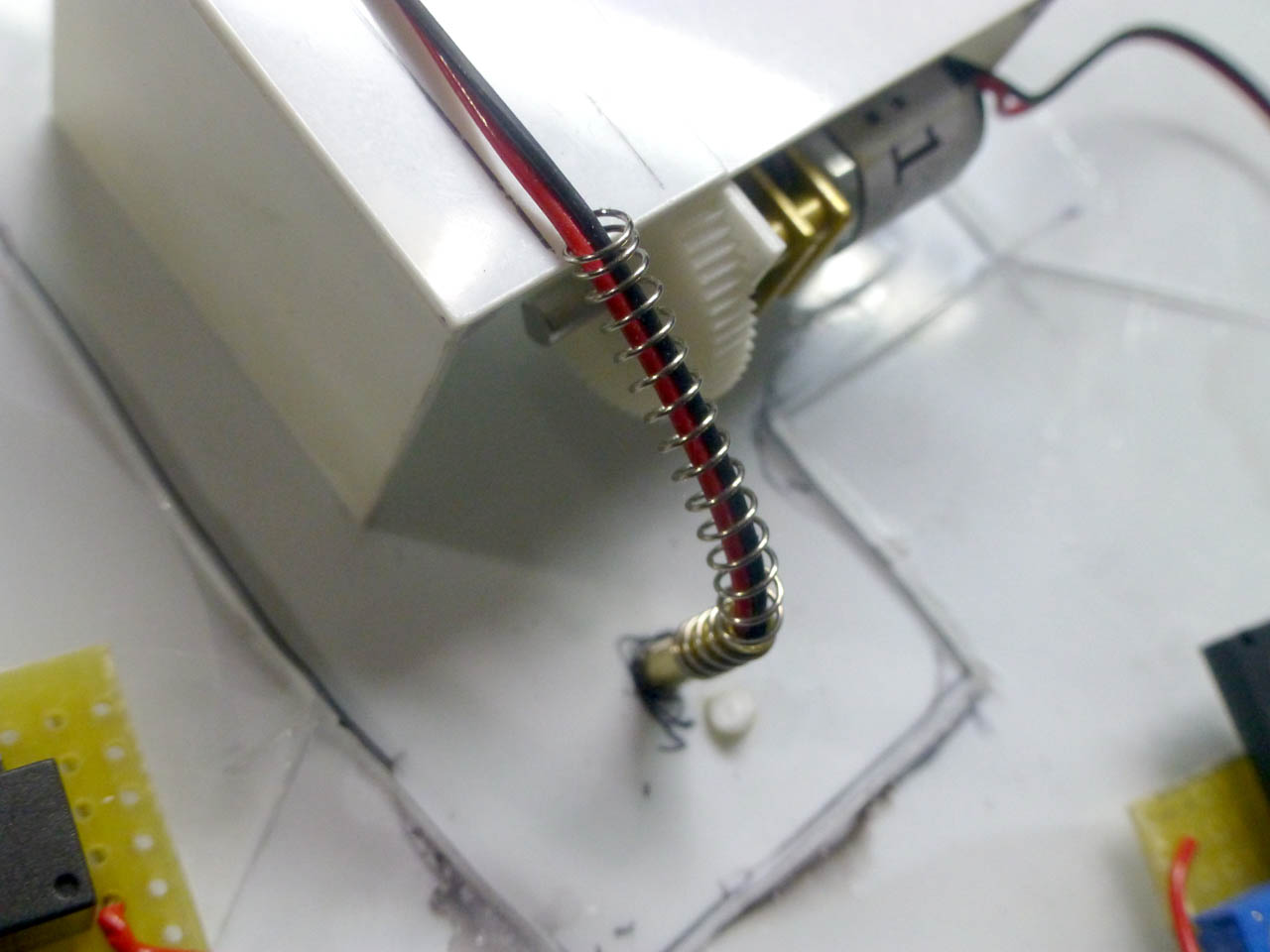
まずは発光ですが、スプリングに光ファイバーを通して、先端まで光を引っぱってくる仕組みにしておきます。
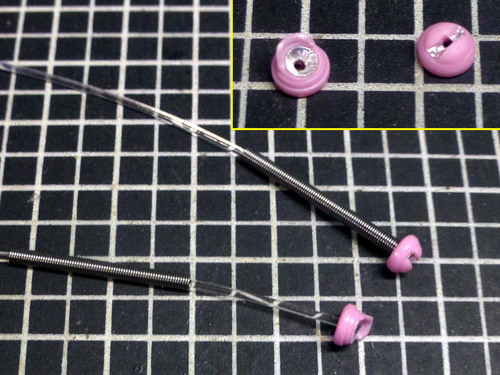
カメラアイは上下で形状が少し違うのですが、発光させたい形状にアルミテープを貼って、光を反射させました。
透明なエポキシ接着剤で、カメラのレンズ部分を作っています。
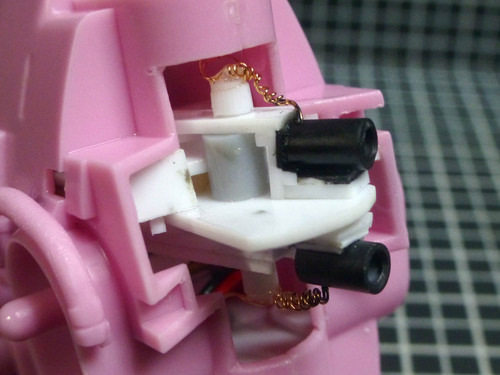
スプリングがピッタリ差し込めるプラパイプを取り付け、奥にチップLEDを仕込みます。
LEDの光は、光ファイバーを通ってカメラアイの先端を光らせるわけです。
これで取り外し可能で、発光も可能なカメラアイの完成です。
LEDは可動部分に取り付けるため、配線をスパイラル状にして固定しましたが、これが大失敗。
展示会の途中で配線が断線してしまうトラブルに見舞われました(-_-)
展示会終了後、ビニール配線で繋ぎなおしています。
カメラアイの動作の様子も、動画でご覧下さい。
モーターの動作音が大きくて、他の展示されているモデラーさん達に対してご迷惑になりそうだったので、カメラアイはスイッチを押した時だけ動く仕様としました。
でも、実際に展示してみたら、会場の喧騒でモーター音なんて、全く気にならなかったです(^_^;)
こちらも後程改良を加えていますので、記事にしたいと思います。
次回は、歩行メカをご紹介したいと思います。
よろしくお付き合い下さい。
現在、2つのブログランキングへ参加しています。
1日1回、応援のワンクリックをぜひお願いしますm(__)m



レトロなゲームを題材として、多数のモデラーが作品を展示するワクワクな展示会ですが、去年は多忙のために参加を断念していたため、今年は気合を入れて製作させて頂きました。
今年のテーマは「SEGA」という事で、真っ先に思い浮かんだのは、名作「サクラ大戦」!
waveさんから発売されていた「光武・改」を製作してみました。

ツイッターで製作過程をツイートしていましたが、ありがたいことにとても好評でしたので、こうしてブログでも製作記として公開することになりましたとさ(^_^*)
かなり古いキットですが、仮組みしてみるとプロポーションは良好です。
細部まで忠実に再現されていて、ほとんどいじる部分はなさそうです。

適度に合わせ目処理が必要な部分があるので、プラモ製作そのものを楽しむ事ができるキットですね。
キットには、真宮寺さくらのフィギュアも付属しており、なんと原型は林浩己さん。
前後抜きなのでご苦労されたとの事ですが、そんな事は微塵も感じさせない見事な造型で、修正すべき部分は全くありません。

頑張って塗装してみました(^_^*)

金色の部分を残してつや消しでトップコートしてから、ブルーゴールドを筆塗りする事で、キラキラ感を残した仕上げにしています。
長いリボンをプラペーパーで追加してみましたが、これがあるともっとサクラちゃんらしくなりますのでお勧めです。
さて、今回は電飾よりも動く模型に注力してみたいと思います。
来場者のみなさんに楽しんでもらうには、ただ光るだけでは物足りないかな?と思ったもので、ちょっとだけ背伸びしてみます(^_^*)
まずはカメラアイですが、光武には上下にチュッパチャップス(?)みたいなカメラアイが2基あり、グリングリン動くんですよね。
これを電動で動かしてみたいと思います。
60rpmのギヤードモーターに歯車を取り付け、カムとクランクを組み合わせて、左右に動くリンク機構を製作してみました。
本体の内部に収めるために、出来るだけコンパクトに製作しています。
リンクは上下にあって、2基のカメラアイを同時に動かします。
映像では、まるで生き物のようにニュルン!と動きますので、カムの位置を微妙にズラして、同じ動きにならないようにしてみました。
左へ動く時と、右へ動く時にはスピードが違いますので、より映像に近い動きを再現できたと思います。
実際の動作の様子は、動画でご覧下さい。
このリンク機構を内部に収めるため、前面カバーの裏になる部分を切り取ります。
本体は左右貼り合わせで、合わせ目処理をしなくてはならないため、接着してしまうとリンク機構へアクセス出来なくなります。
グリスアップ等が後から可能になる様に、出来るだけ大きく開口しています。
内部に収めると、こんな感じ。
モーターやリンク機構を固定するために、プラ板で支えを作ってあげる必要があります。
動くものを製作する場合、固定することは割と重要で、騒音や故障を防ぐために手を抜けない部分です。
後程記事にしますが、歩行させる仕掛けも作りますので、本体を閉じる前に腰が回転する仕組みも組み込んでおきます。
磁石で接続させて、自由に動くようにしているだけですが、これが後程スムーズな動きのために役に立ってくれました。
カメラアイは、動きながら発光もして欲しいです。
しかも、カバーを外す時に、取り外す事も出来るようにしなくてはなりません。
まずは発光ですが、スプリングに光ファイバーを通して、先端まで光を引っぱってくる仕組みにしておきます。
カメラアイは上下で形状が少し違うのですが、発光させたい形状にアルミテープを貼って、光を反射させました。
透明なエポキシ接着剤で、カメラのレンズ部分を作っています。

スプリングがピッタリ差し込めるプラパイプを取り付け、奥にチップLEDを仕込みます。
LEDの光は、光ファイバーを通ってカメラアイの先端を光らせるわけです。
これで取り外し可能で、発光も可能なカメラアイの完成です。
LEDは可動部分に取り付けるため、配線をスパイラル状にして固定しましたが、これが大失敗。
展示会の途中で配線が断線してしまうトラブルに見舞われました(-_-)
展示会終了後、ビニール配線で繋ぎなおしています。
カメラアイの動作の様子も、動画でご覧下さい。
モーターの動作音が大きくて、他の展示されているモデラーさん達に対してご迷惑になりそうだったので、カメラアイはスイッチを押した時だけ動く仕様としました。
でも、実際に展示してみたら、会場の喧騒でモーター音なんて、全く気にならなかったです(^_^;)
こちらも後程改良を加えていますので、記事にしたいと思います。
次回は、歩行メカをご紹介したいと思います。
よろしくお付き合い下さい。
現在、2つのブログランキングへ参加しています。
1日1回、応援のワンクリックをぜひお願いしますm(__)m
2018-04-20 21:11
コメント(2)
歩行動作の製作 [サクラ大戦 光武 製作記]
今回は歩行動作の製作です。
ずっと前から歩く動作に興味があって、色々と調べていました。
今回製作した歩行動作の原理は、元々は別の模型に使おうと温めていたアイディアだったのですが、あいにく使う機会に恵まれず、放置されていたものです(^_^*)
光武を製作する、この機会にやっと実現出来ました。
色々と反省点はありますが、とりあえず動いてくれて良かったです。
さて、歩行の動きを再現するには、単純にカムとクランクを組み合わせただけでは上手く表現出来ません。
どうしても、カクカクした直線的な動きになってしまい、重量のあるロボがノシノシと歩く動きにはならないのです。
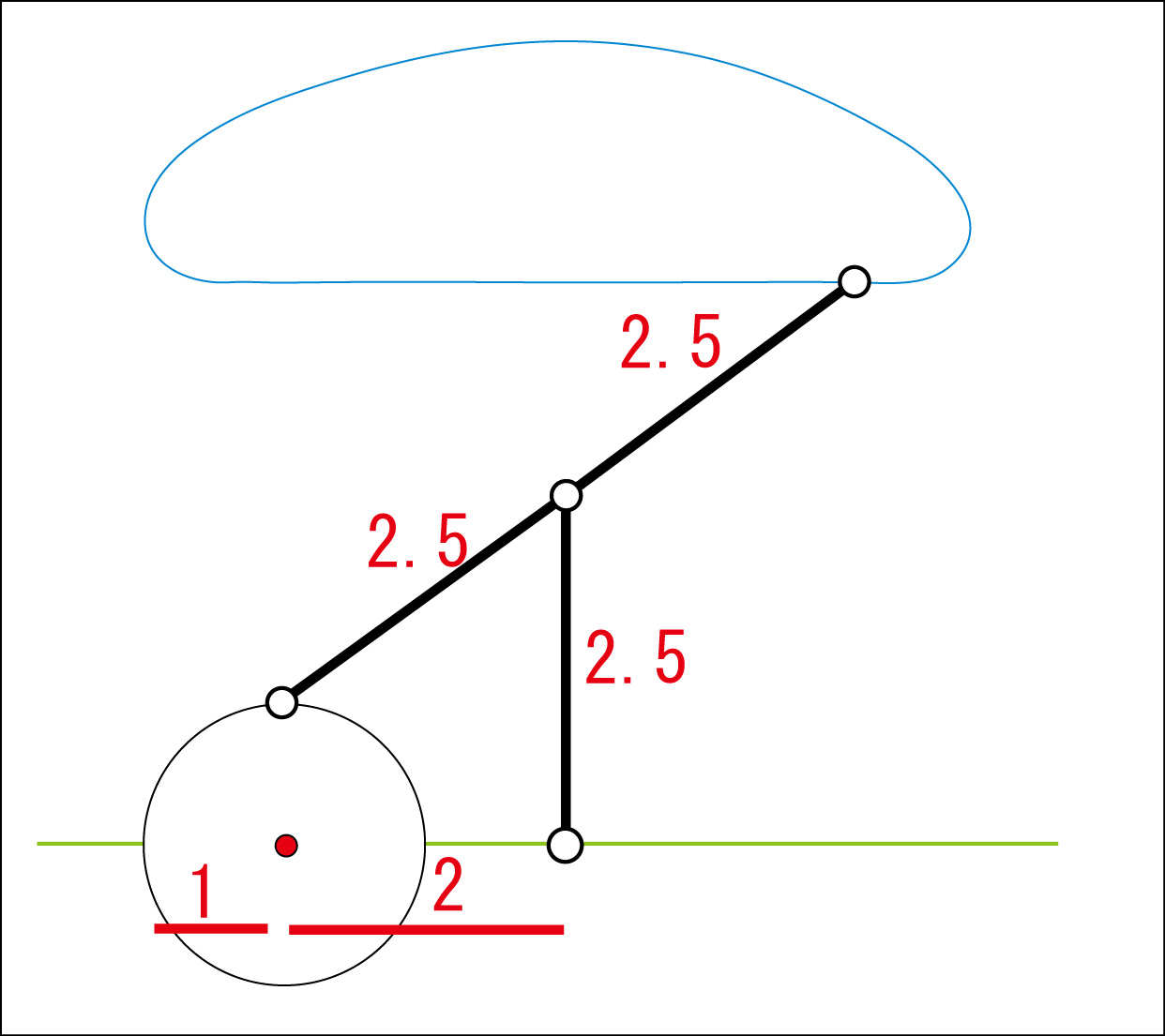
そこで、今回はシェビチェフリンク(別名:ホーキンスリンク)という構造を使います。
このGIFは「Hyrodium laboratory」さん
https://hylab.blogspot.jp/2012/12/tchebicheff-link.html?showComment=1522511135393#c8343250552248649981
でご紹介されていたものを転用させて頂きました。
単純な構造でありながら、平行移動で下がる動作、放物線を描きながら素早く戻る動作など、歩行を再現するには最適なリンクであると思います。
これを使うには、駆動軸カムの回転半径を1として、図の様な比率を取る必要があります。
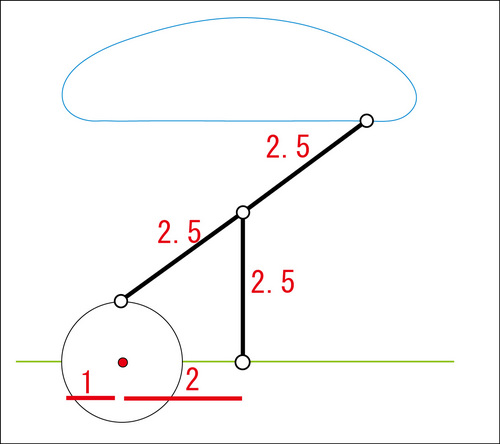
このルールさえ守れば、歩行動作を再現出来るのですから、ありがたいリンク機構ですね。
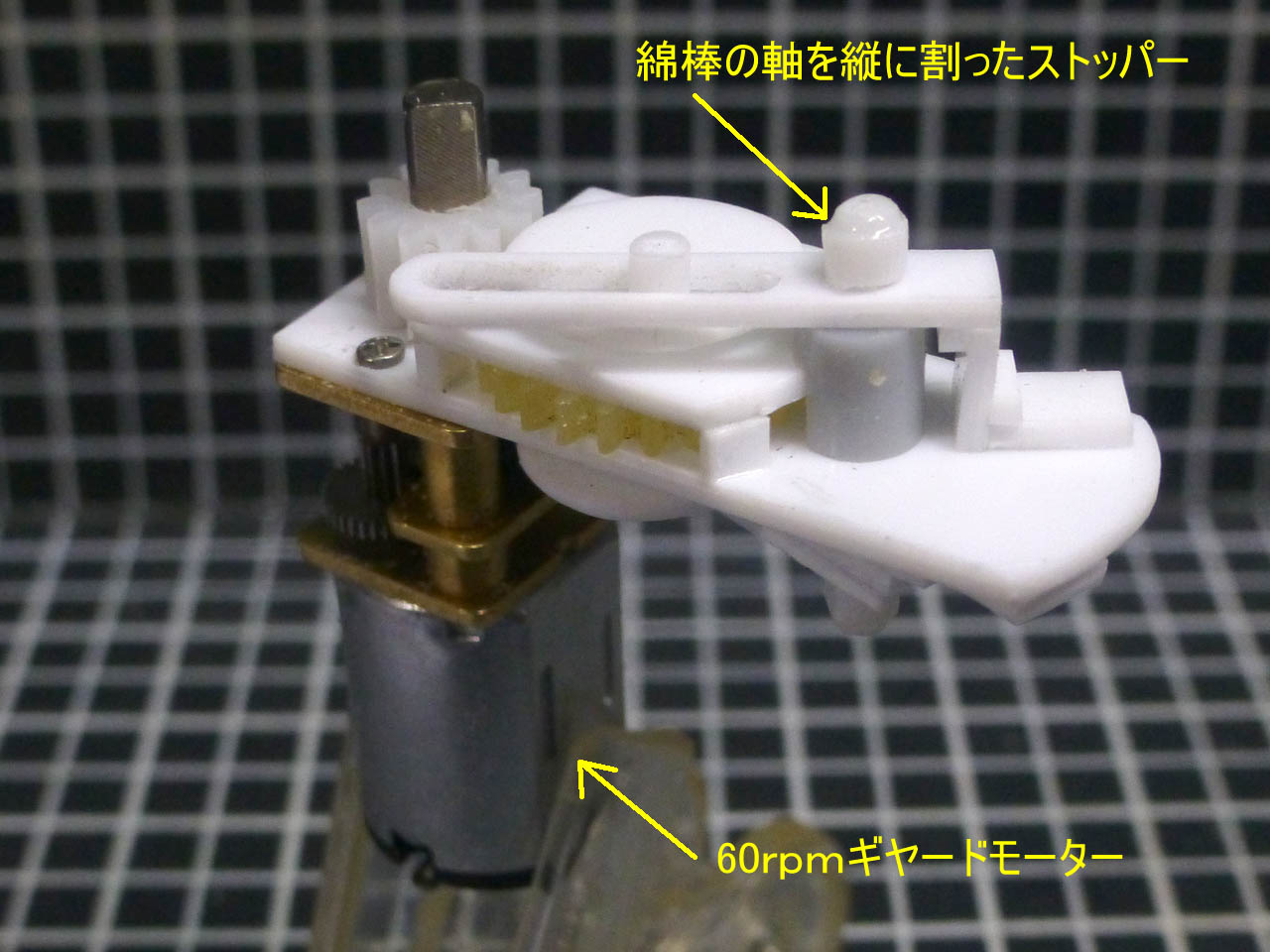
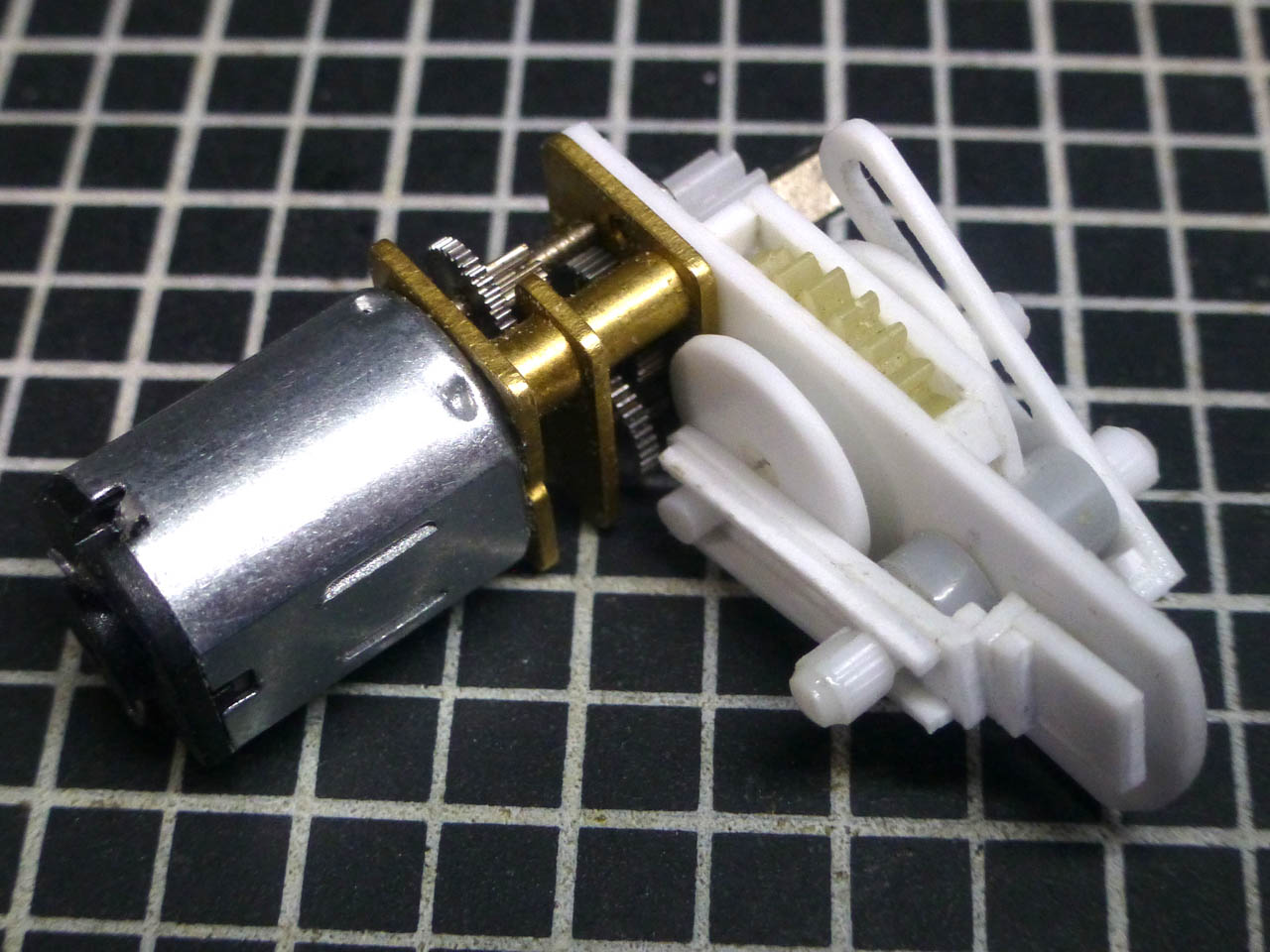
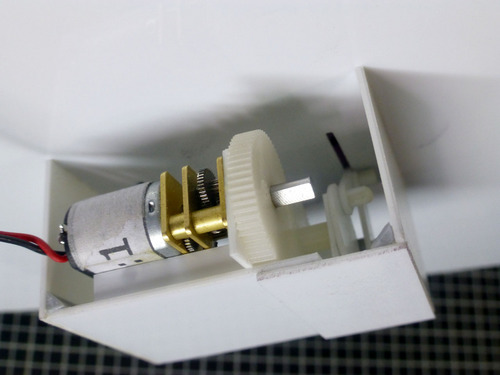
60rpmのギヤードモーターを使い、ギヤとプラ板で自作してみました。

歩幅を2.5cmにするために、各動作軸の長さを逆算して決めています。
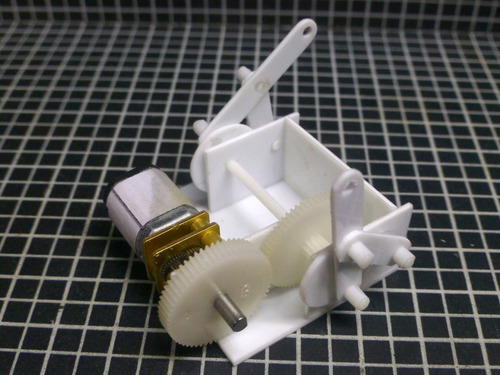
ギヤは、何かをバラした時に取っておいた手持ちから、同じ径のものを2個、加工して使用しました。
軸の外れ止めは、綿棒をカットして、縦に割ったものをエポキシ接着剤で固定しています。
全てプラ材で製作しているので、強度に不安があります。
実は、これは試作品で、上手く行ったら透明なアクリル板で作り直すつもりでしたが、時間的に追い詰められていたので、これをそのまま使ってしまいました(^_^*)
完成品では、マイコンでタイマー動作させ、連続で動かさない様に対策しています。
足は、キットではポリキャップを使った構造になっています。

あまり可動範囲が広いとはいえませんが、歩行動作には充分なクリアランスで、余分なスキマが出来ないぶん、助かってます。
このままでは歩行動作が出来ませんので、全ての関節をユルユルに改造します。
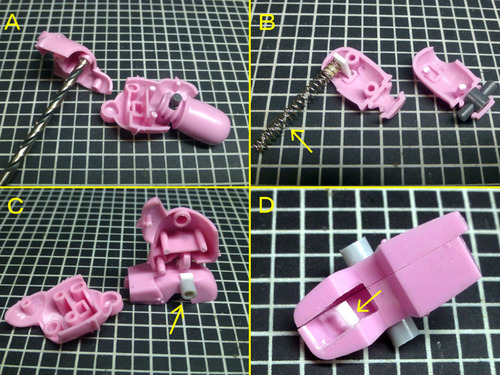
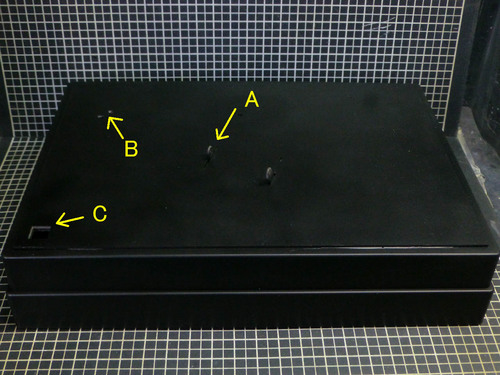
A ヒザはポリキャップですが、ドリルで受けを大きくして、保持力を無くし
ました。
B 付け根もポリキャップでしたが、シャープペンシルから取り出したスプリ
ングに置き換えます。
自由に動く付け根にして、柔軟な動きに対応させます。
C かかとは、ちょうど軸受けのような成型になっていたので、新たにプラパ
イプで軸を作りました。
D 足の裏は、かかとの一部を切り取り、リンクの軸を接続する軸を作りました
中央がへこんでいる構造になっている事も、良い方向に働いてくれました。
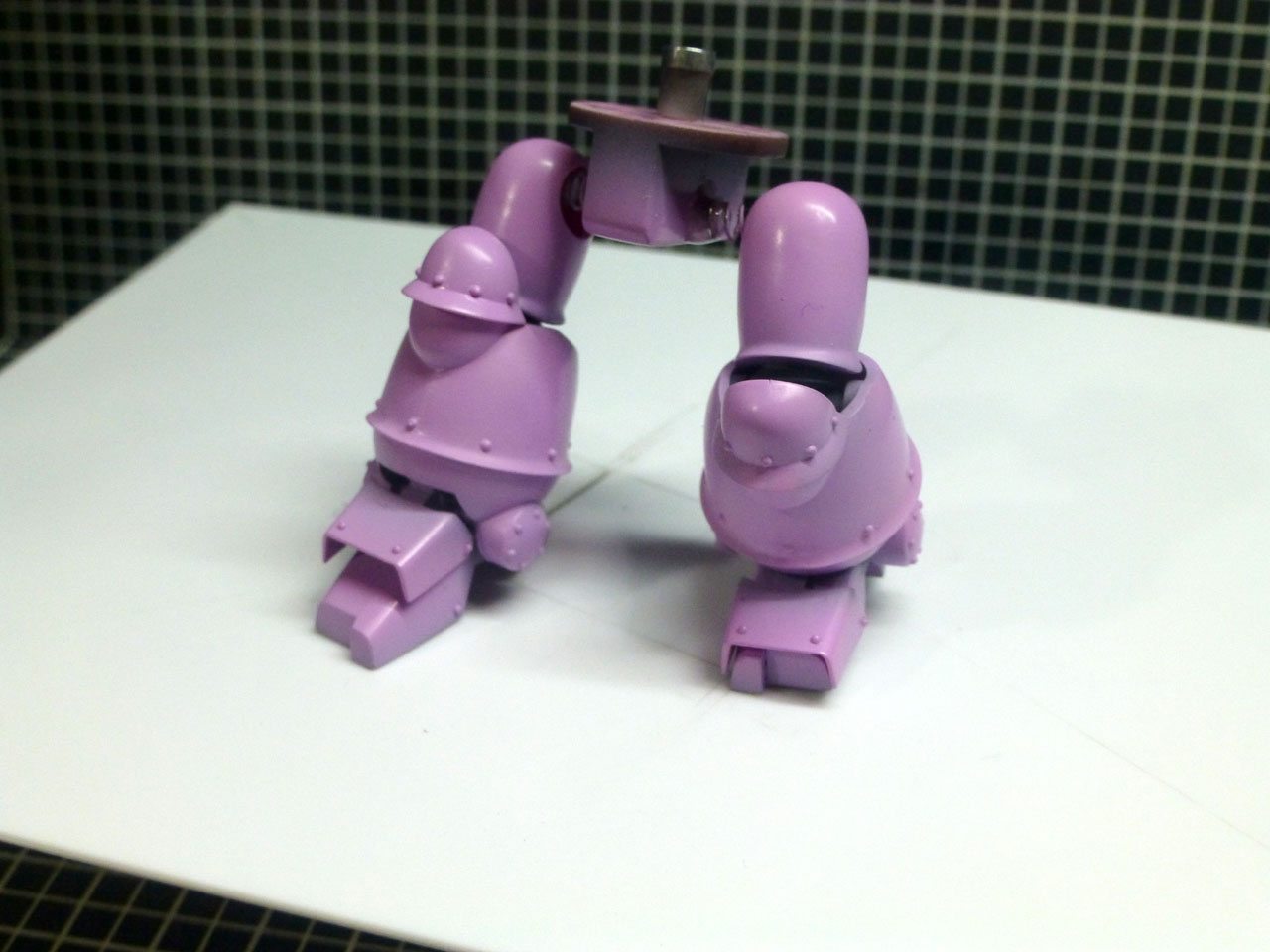
全てを組み立てた様子です。

見た目はキットと変わりない様に見えますが、全く保持力の無いヘロヘロな足になりました。
付け根のスプリングは、スカートの中に隠れて見えなくなってくれるハズです。
この足は、左右貼り合わせなので、接着して合わせ目を消しておきます。
歩行装置には、60rpmのギヤードモーターを使ったのですが、1秒間に一回転では早すぎます。
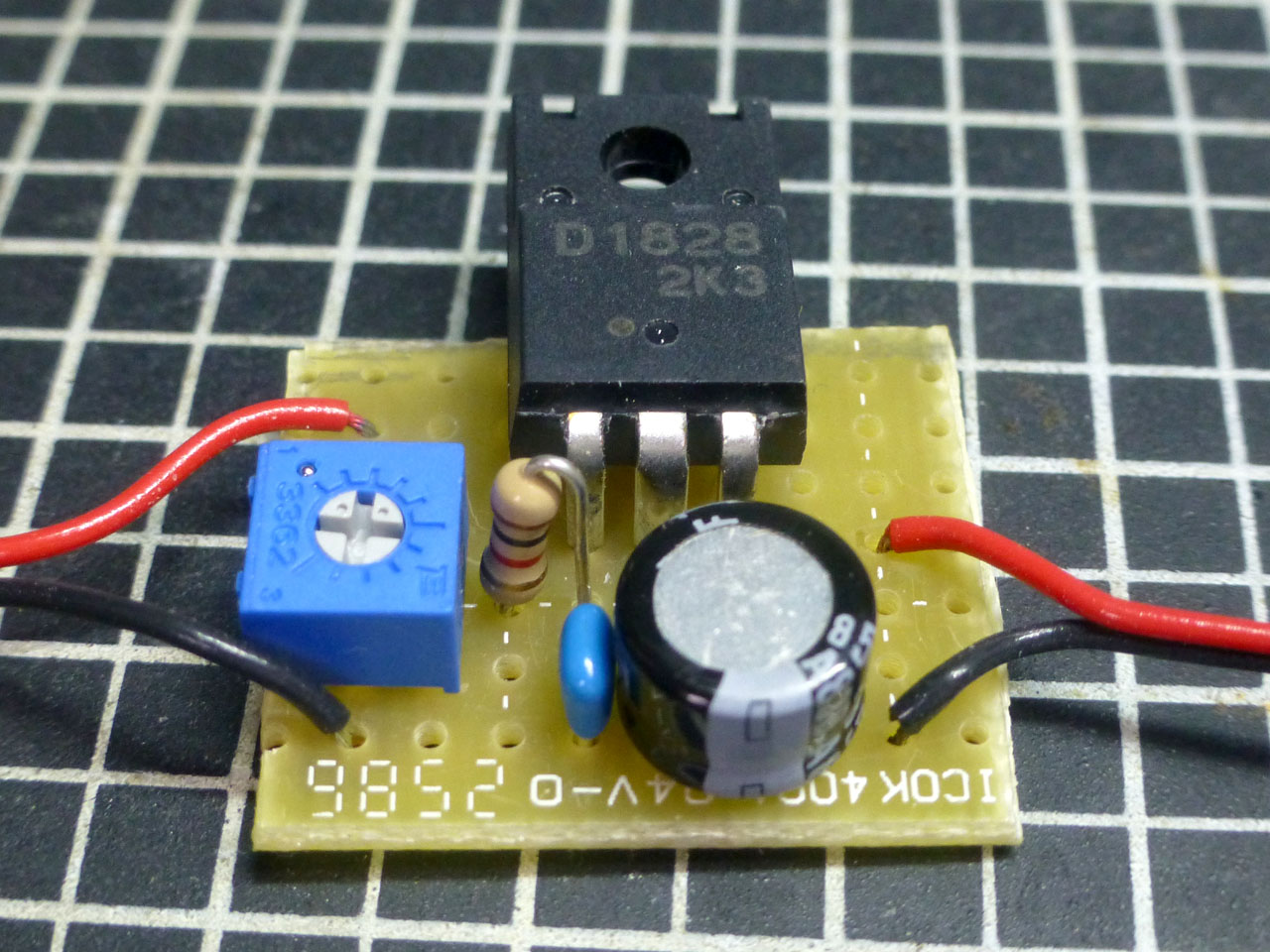
もっと重そうに、ゆっくりと歩行して欲しいので、モーターの回転速度を落とす回路を作りました。
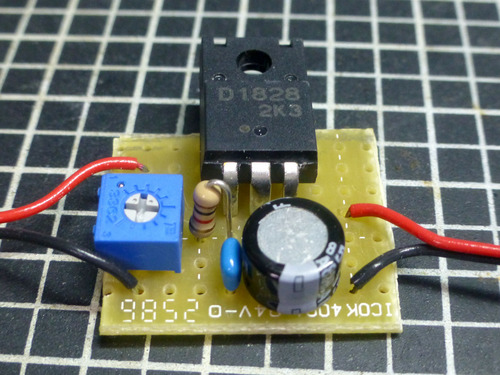
ダーリントントランジスタを使った電圧制御回路です。
ボリュームを回す事で、停止から最大速度まで調節可能です。
今回は5V1Aの電源を繋ぎますが、この程度なら発熱も心配無いので放熱板は付けませんでした。
実際、連続動作させてもほんのり温かくなる程度です。
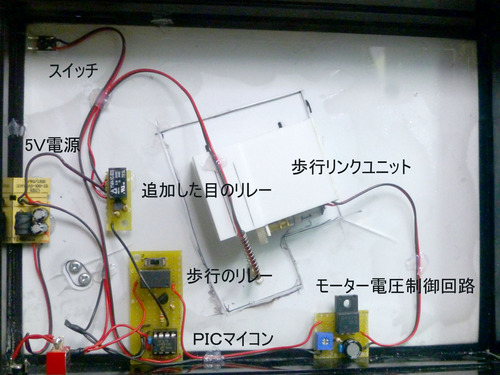
歩行装置は、ベースの床下に取り付け、リンクの先だけをスリットから露出させました。
実際にあるくわけで無く、ムーンウォーク状態になります。

それでも、ゆっくりした連続動作によって、歩いているように見せる事が出来たと思います。
実際に動作している様子と、動作原理などは、動画で見て頂けば一発だと思いますので、YouTubeに動画を公開しました。
こちらを見て頂ければ、製作の内容も一発で理解して頂けると思います。
是非ご覧下さいね(^^)/
次回は、塗装・組み立ての様子をご紹介したいと思います。
現在、2つのブログランキングへ参加しています。
1日1回、応援のワンクリックをぜひお願いしますm(__)m
ずっと前から歩く動作に興味があって、色々と調べていました。
今回製作した歩行動作の原理は、元々は別の模型に使おうと温めていたアイディアだったのですが、あいにく使う機会に恵まれず、放置されていたものです(^_^*)
光武を製作する、この機会にやっと実現出来ました。
色々と反省点はありますが、とりあえず動いてくれて良かったです。
さて、歩行の動きを再現するには、単純にカムとクランクを組み合わせただけでは上手く表現出来ません。
どうしても、カクカクした直線的な動きになってしまい、重量のあるロボがノシノシと歩く動きにはならないのです。
そこで、今回はシェビチェフリンク(別名:ホーキンスリンク)という構造を使います。
このGIFは「Hyrodium laboratory」さん
https://hylab.blogspot.jp/2012/12/tchebicheff-link.html?showComment=1522511135393#c8343250552248649981
でご紹介されていたものを転用させて頂きました。
単純な構造でありながら、平行移動で下がる動作、放物線を描きながら素早く戻る動作など、歩行を再現するには最適なリンクであると思います。
これを使うには、駆動軸カムの回転半径を1として、図の様な比率を取る必要があります。
このルールさえ守れば、歩行動作を再現出来るのですから、ありがたいリンク機構ですね。
60rpmのギヤードモーターを使い、ギヤとプラ板で自作してみました。

歩幅を2.5cmにするために、各動作軸の長さを逆算して決めています。
ギヤは、何かをバラした時に取っておいた手持ちから、同じ径のものを2個、加工して使用しました。
軸の外れ止めは、綿棒をカットして、縦に割ったものをエポキシ接着剤で固定しています。
全てプラ材で製作しているので、強度に不安があります。
実は、これは試作品で、上手く行ったら透明なアクリル板で作り直すつもりでしたが、時間的に追い詰められていたので、これをそのまま使ってしまいました(^_^*)
完成品では、マイコンでタイマー動作させ、連続で動かさない様に対策しています。
足は、キットではポリキャップを使った構造になっています。

あまり可動範囲が広いとはいえませんが、歩行動作には充分なクリアランスで、余分なスキマが出来ないぶん、助かってます。
このままでは歩行動作が出来ませんので、全ての関節をユルユルに改造します。

A ヒザはポリキャップですが、ドリルで受けを大きくして、保持力を無くし
ました。
B 付け根もポリキャップでしたが、シャープペンシルから取り出したスプリ
ングに置き換えます。
自由に動く付け根にして、柔軟な動きに対応させます。
C かかとは、ちょうど軸受けのような成型になっていたので、新たにプラパ
イプで軸を作りました。
D 足の裏は、かかとの一部を切り取り、リンクの軸を接続する軸を作りました
中央がへこんでいる構造になっている事も、良い方向に働いてくれました。
全てを組み立てた様子です。

見た目はキットと変わりない様に見えますが、全く保持力の無いヘロヘロな足になりました。
付け根のスプリングは、スカートの中に隠れて見えなくなってくれるハズです。
この足は、左右貼り合わせなので、接着して合わせ目を消しておきます。
歩行装置には、60rpmのギヤードモーターを使ったのですが、1秒間に一回転では早すぎます。
もっと重そうに、ゆっくりと歩行して欲しいので、モーターの回転速度を落とす回路を作りました。
ダーリントントランジスタを使った電圧制御回路です。
ボリュームを回す事で、停止から最大速度まで調節可能です。
今回は5V1Aの電源を繋ぎますが、この程度なら発熱も心配無いので放熱板は付けませんでした。
実際、連続動作させてもほんのり温かくなる程度です。
歩行装置は、ベースの床下に取り付け、リンクの先だけをスリットから露出させました。
実際にあるくわけで無く、ムーンウォーク状態になります。
それでも、ゆっくりした連続動作によって、歩いているように見せる事が出来たと思います。
実際に動作している様子と、動作原理などは、動画で見て頂けば一発だと思いますので、YouTubeに動画を公開しました。
※BGMがあります
こちらを見て頂ければ、製作の内容も一発で理解して頂けると思います。
是非ご覧下さいね(^^)/
次回は、塗装・組み立ての様子をご紹介したいと思います。
現在、2つのブログランキングへ参加しています。
1日1回、応援のワンクリックをぜひお願いしますm(__)m
2018-04-24 12:48
コメント(4)
塗装と組み立て [サクラ大戦 光武 製作記]
今回は塗装と組み立ての様子をご紹介させて頂きます(^^)/
カメラアイの電動化、歩行動作の製作と、メインディシュは終わってしまった感がありますが、製作記はもうちょっと続きます(^_^*)
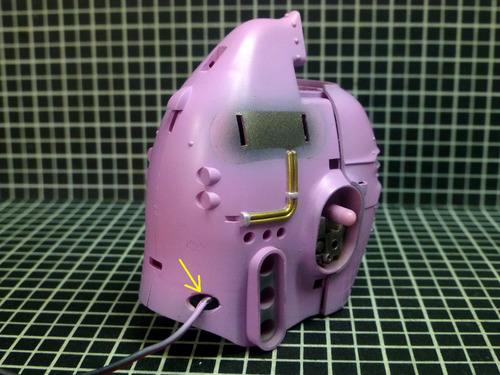
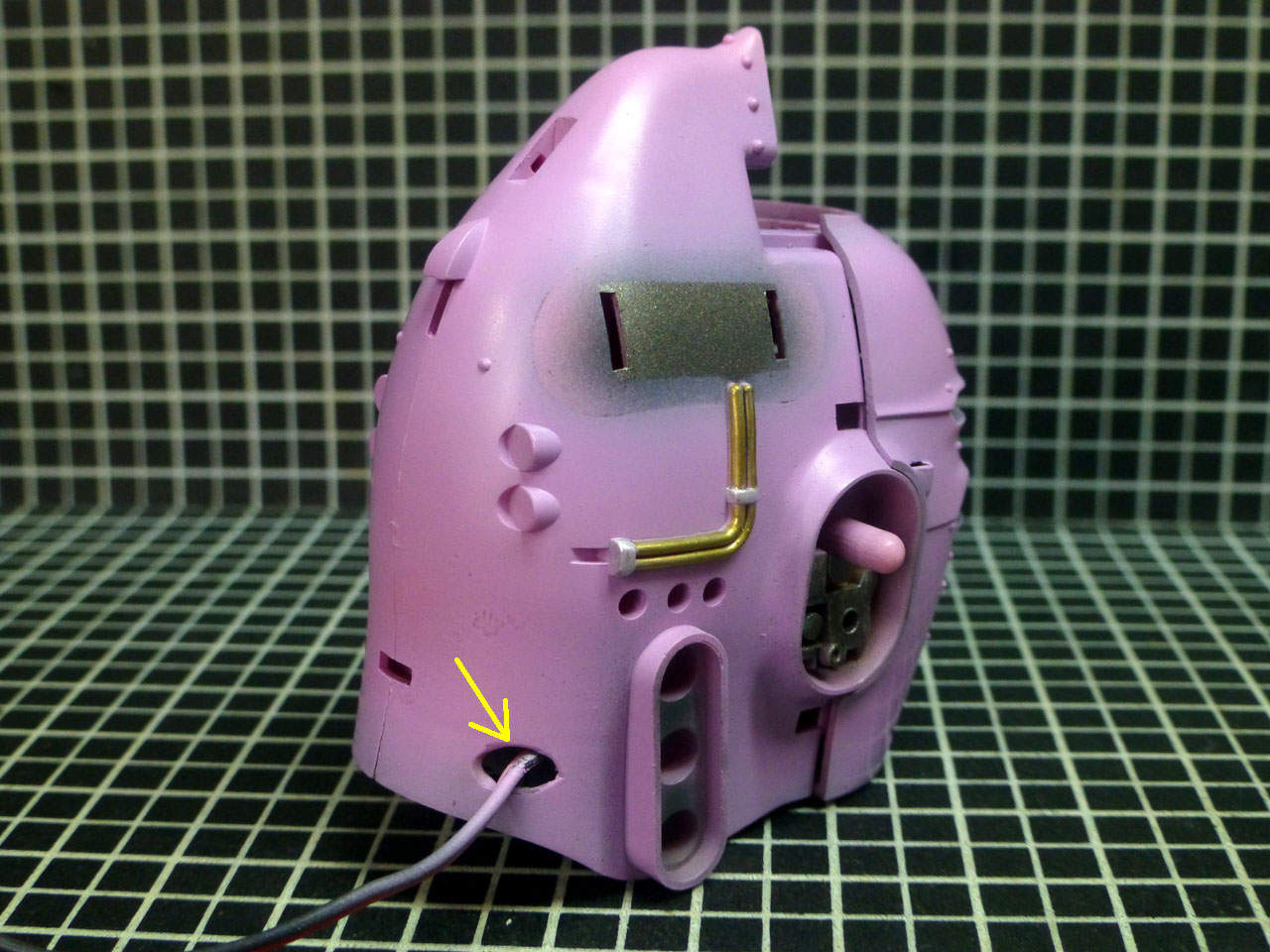
塗装の前に、ちょっとだけディテールアップしました。

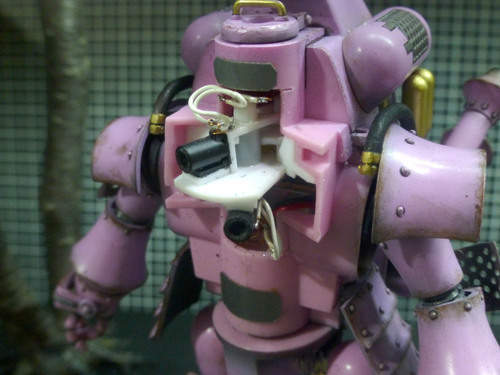
頭部に付いているオーバル型の突起物ですが、穴が抜けていなかったので開口しました。
それだけなんですけどね(^_^*)
実際に穴が開いていた方がリアルになりますね
それと、脇の下にちょっとしたメカを追加しています。

ジャンクパーツから、それらしく追加してみたのですが、完成するとほとんど見えません(+_+)
気分的なものですね・・・
他にディテールアップした部分は無くて、古いキットなのに、とても完成度の高いキットですね。
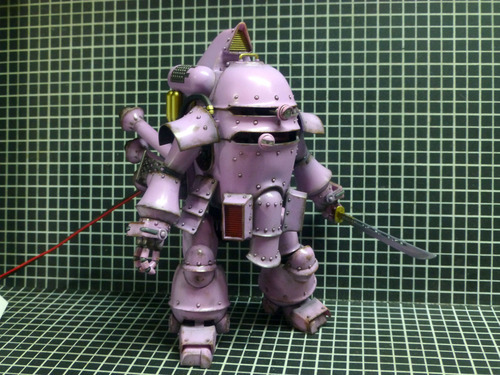
塗装します。
薄いパーツが多くありますので、光の透過を防ぐのと、立体感を強調するために、ブラックでシャドー吹きしました。

関節やエッジに、少しだけブラックを残す感じでピンクを吹いています。
ピンクは、ビンのまま吹くとオモチャっぽくなるので、ピンク40%・クールホワイト55%・パープル5%で明るいけど重く見えるピンクに調色しました。

小物はゴールドやシルバーなど、メタリック系が多いのですが、マスキングせずに筆塗りで仕上げています。
本体は、突起物に開けた穴から内部が見えてしまうので、下地のブラックを残してあります。

完成してみたら、中なんて全然見えなかったんですけどね(^_^;)
後部には、支柱を挿す穴を開けておき、そこからカメラアイのための電源ラインを引き出してあります。
スミ入れ後、汚しを加えました。
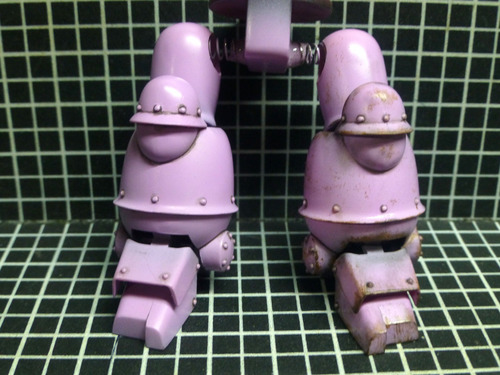
スミ入れはエナメルで、ブラックとフラットアースのこげ茶を流しています。
左側はスミ入れだけですけど、リアリティーが足りない気がしますよね。
サクラ機は、あまり汚れていないイメージだったのですが、少し汚しを加えた方がよさそうだったので、軽く加えてみたのが右側です。
この汚しは、綿棒にコゲ茶を含ませて、エッジでコロコロ転がして着色したものです。

失敗しても溶剤で拭き取るだけですので、納得の行くまで何度でもトライ出来ます。
んで、塗装が終了しました。
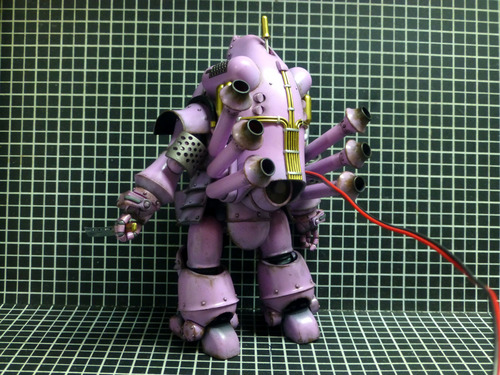
背中に煙突がありますが、ここはウェザリングマスターのススをこすり付けて再現しています。
スス汚れは関節などにも少々加えており、パウダーでなければ表現できない汚れを加えてみました。
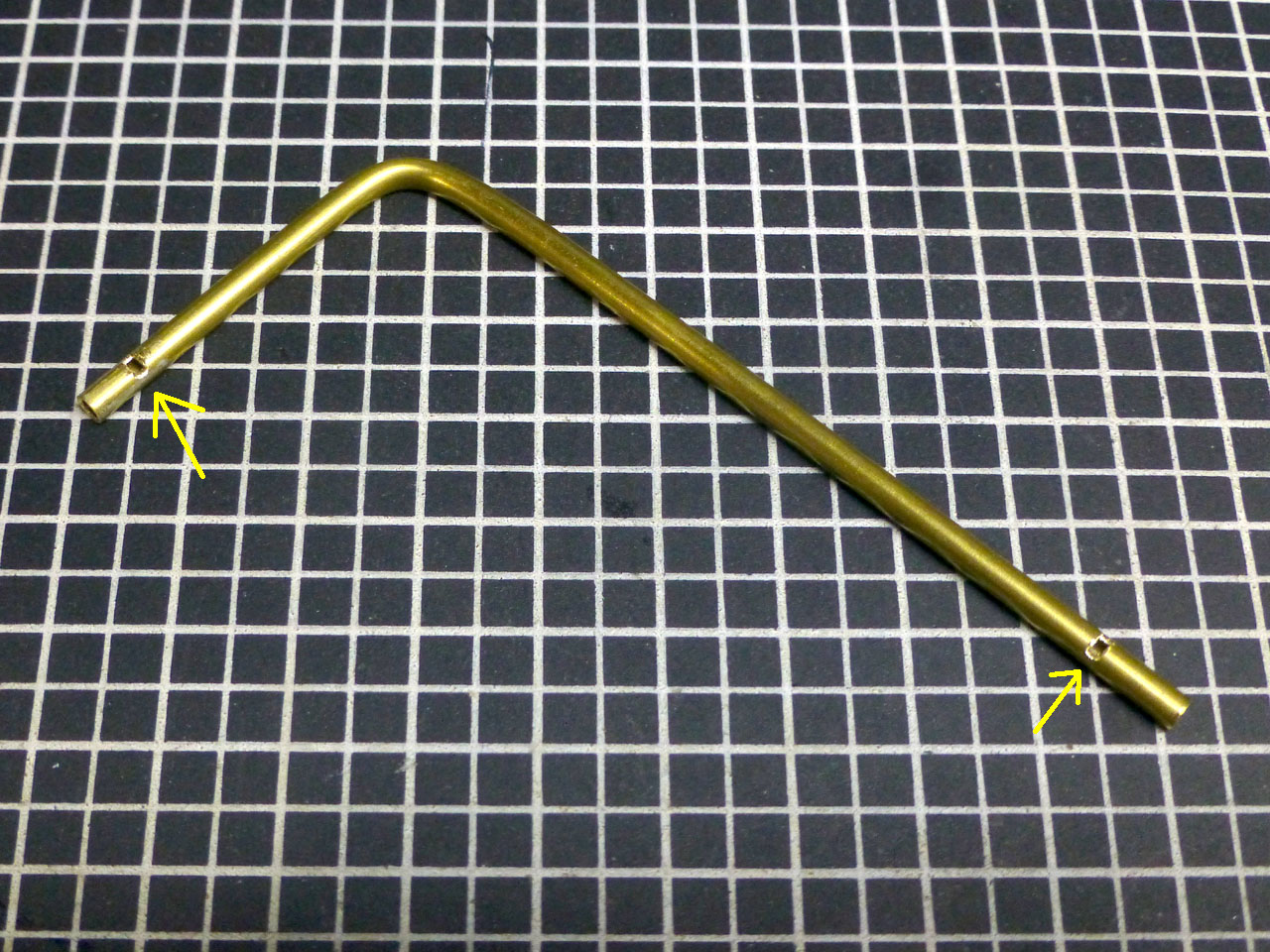
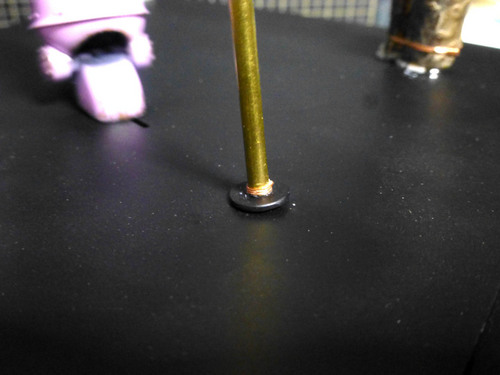
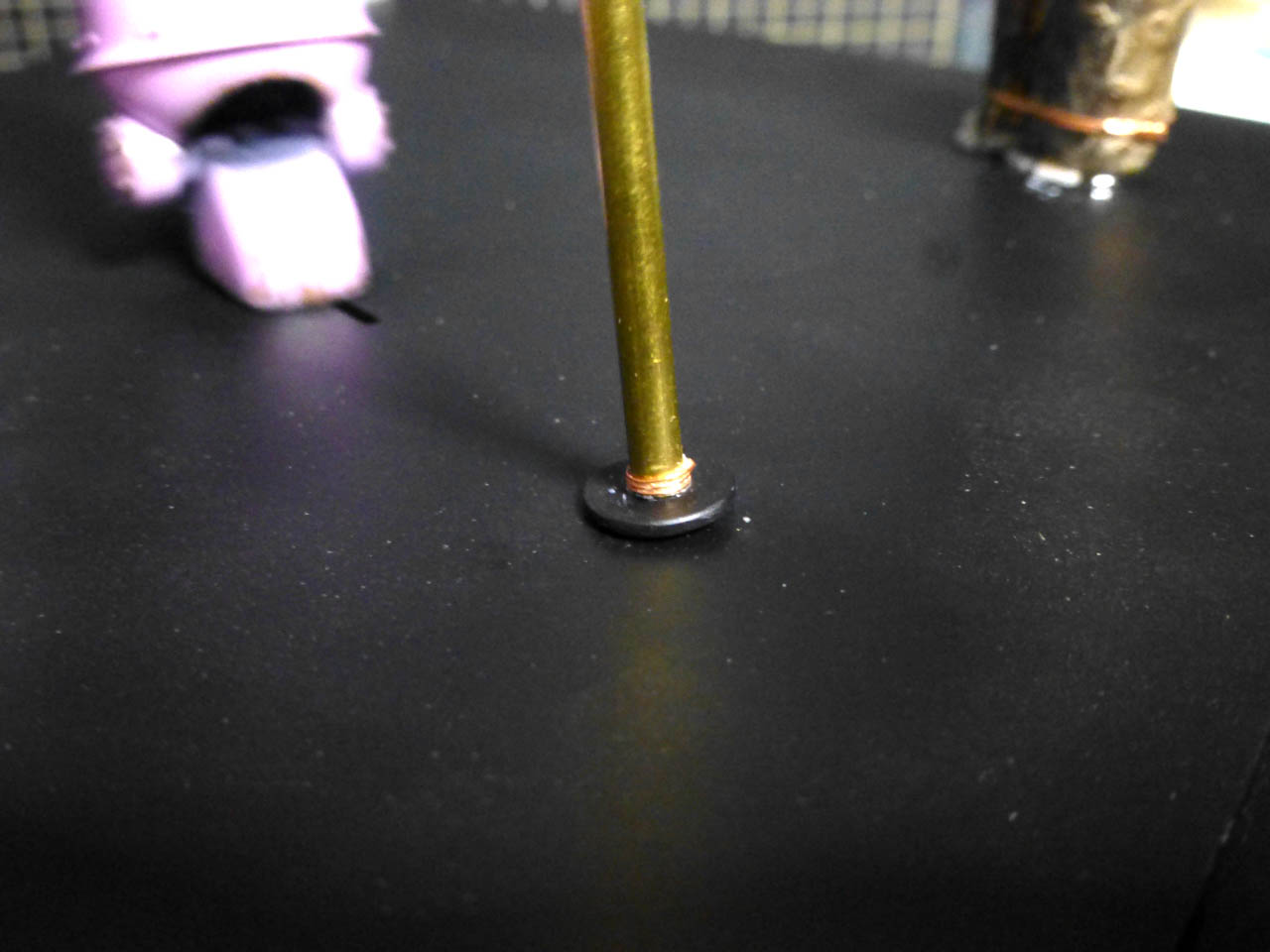
最後に、支柱を固定します。
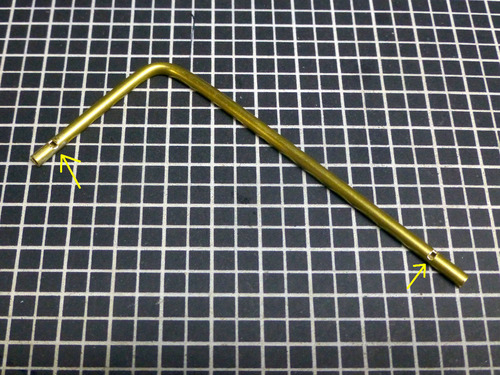
真鍮パイプを曲げて、固定するための溝を彫りました。
パイプを綺麗に曲げるのは難しいのですが、マジックなどの太いパイプに巻き付けるつもりで少しずつ曲げていくと綺麗に曲げられます。
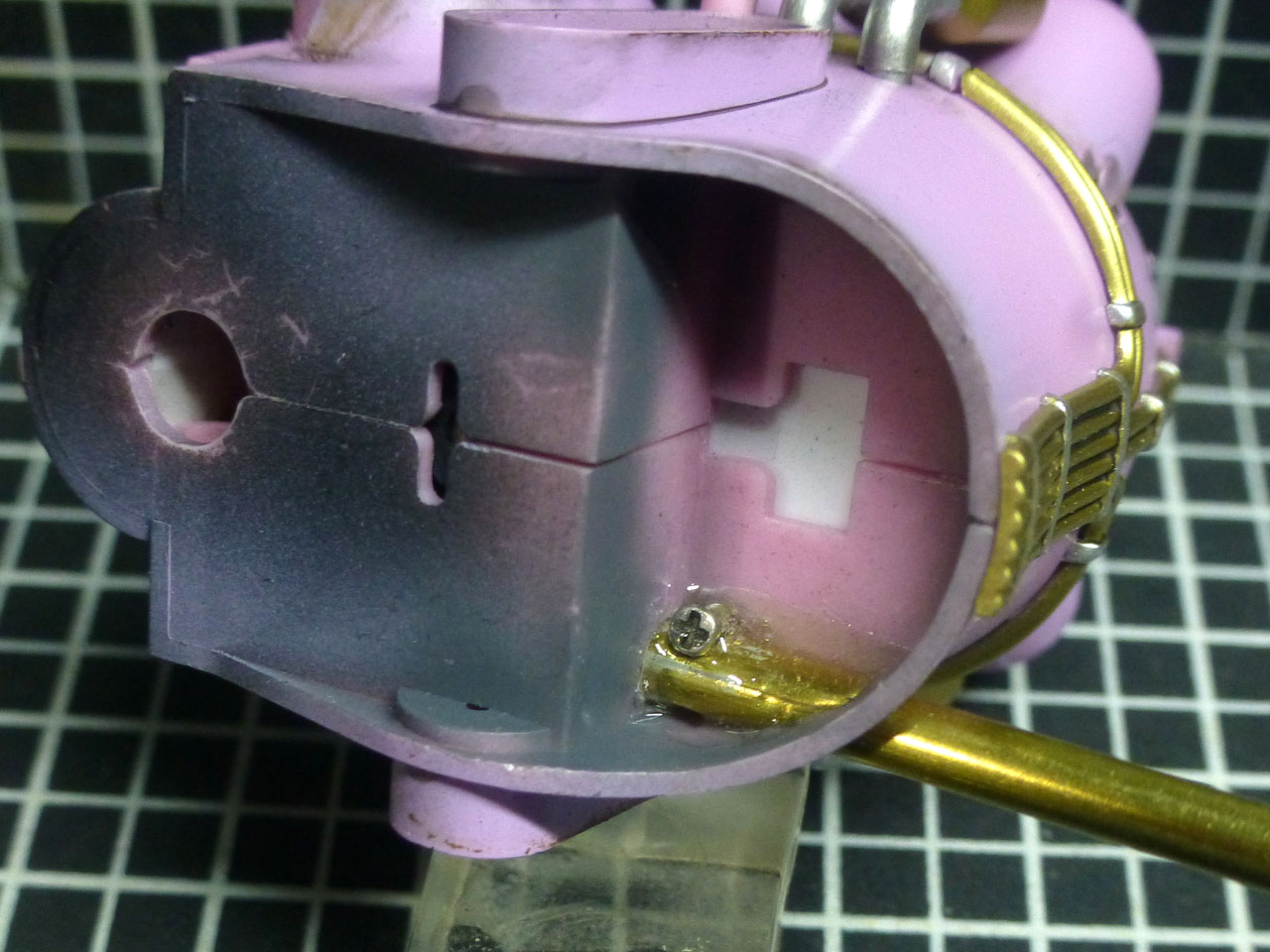
配線を通し、本体にガッチリと固定します。
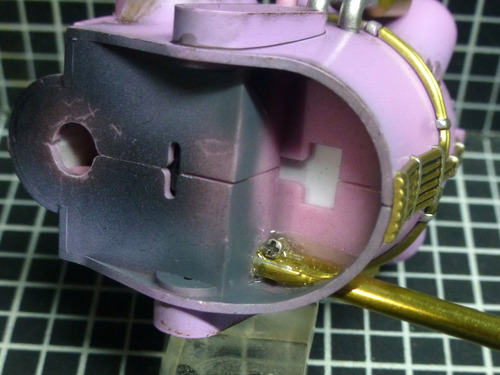
本体に差し込んだだけでは回転してしまうので、溝を利用してネジで回転を防止しています。
それからエポキシ接着剤でコーティングしてしまい、二度と外れない程しっかりと固定しました。
この支柱は、歩行動作をする足に負担を掛けないため、本体を空中で支える役目があります。
できるだけしっかりと固定する必要がありました。
次回はベースと、満開のサクラの製作をご紹介しますね。
現在、2つのブログランキングへ参加しています。
1日1回、応援のワンクリックをぜひお願いしますm(__)m
カメラアイの電動化、歩行動作の製作と、メインディシュは終わってしまった感がありますが、製作記はもうちょっと続きます(^_^*)
塗装の前に、ちょっとだけディテールアップしました。

頭部に付いているオーバル型の突起物ですが、穴が抜けていなかったので開口しました。
それだけなんですけどね(^_^*)
実際に穴が開いていた方がリアルになりますね
それと、脇の下にちょっとしたメカを追加しています。

ジャンクパーツから、それらしく追加してみたのですが、完成するとほとんど見えません(+_+)
気分的なものですね・・・
他にディテールアップした部分は無くて、古いキットなのに、とても完成度の高いキットですね。
塗装します。
薄いパーツが多くありますので、光の透過を防ぐのと、立体感を強調するために、ブラックでシャドー吹きしました。

関節やエッジに、少しだけブラックを残す感じでピンクを吹いています。
ピンクは、ビンのまま吹くとオモチャっぽくなるので、ピンク40%・クールホワイト55%・パープル5%で明るいけど重く見えるピンクに調色しました。

小物はゴールドやシルバーなど、メタリック系が多いのですが、マスキングせずに筆塗りで仕上げています。
本体は、突起物に開けた穴から内部が見えてしまうので、下地のブラックを残してあります。

完成してみたら、中なんて全然見えなかったんですけどね(^_^;)
後部には、支柱を挿す穴を開けておき、そこからカメラアイのための電源ラインを引き出してあります。
スミ入れ後、汚しを加えました。

スミ入れはエナメルで、ブラックとフラットアースのこげ茶を流しています。
左側はスミ入れだけですけど、リアリティーが足りない気がしますよね。
サクラ機は、あまり汚れていないイメージだったのですが、少し汚しを加えた方がよさそうだったので、軽く加えてみたのが右側です。
この汚しは、綿棒にコゲ茶を含ませて、エッジでコロコロ転がして着色したものです。

失敗しても溶剤で拭き取るだけですので、納得の行くまで何度でもトライ出来ます。
んで、塗装が終了しました。
背中に煙突がありますが、ここはウェザリングマスターのススをこすり付けて再現しています。
スス汚れは関節などにも少々加えており、パウダーでなければ表現できない汚れを加えてみました。
最後に、支柱を固定します。
真鍮パイプを曲げて、固定するための溝を彫りました。
パイプを綺麗に曲げるのは難しいのですが、マジックなどの太いパイプに巻き付けるつもりで少しずつ曲げていくと綺麗に曲げられます。
配線を通し、本体にガッチリと固定します。
本体に差し込んだだけでは回転してしまうので、溝を利用してネジで回転を防止しています。
それからエポキシ接着剤でコーティングしてしまい、二度と外れない程しっかりと固定しました。
この支柱は、歩行動作をする足に負担を掛けないため、本体を空中で支える役目があります。
できるだけしっかりと固定する必要がありました。
次回はベースと、満開のサクラの製作をご紹介しますね。
現在、2つのブログランキングへ参加しています。
1日1回、応援のワンクリックをぜひお願いしますm(__)m
2018-04-25 19:40
コメント(0)
ベースとさくら [サクラ大戦 光武 製作記]
今回はベースと満開のサクラを製作し、完成です(^^)/
ベースとして、100均のプラスチックのトレイを逆さまにして使用しますが、光武とさくらちゃんフィギュアだけでは寂しいです。
満開のサクラを添えて、華やかなベースにしたいと思いました。
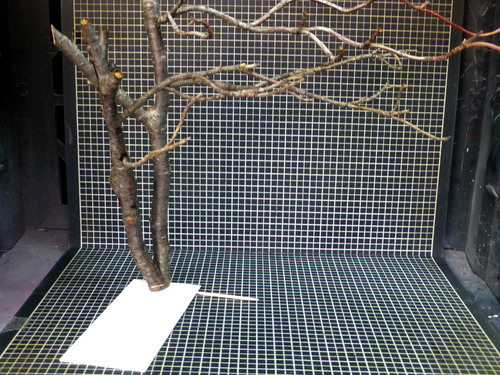
サクラの木を製作します。
ちょうど製作している時は、サクラが咲き始める頃でした。
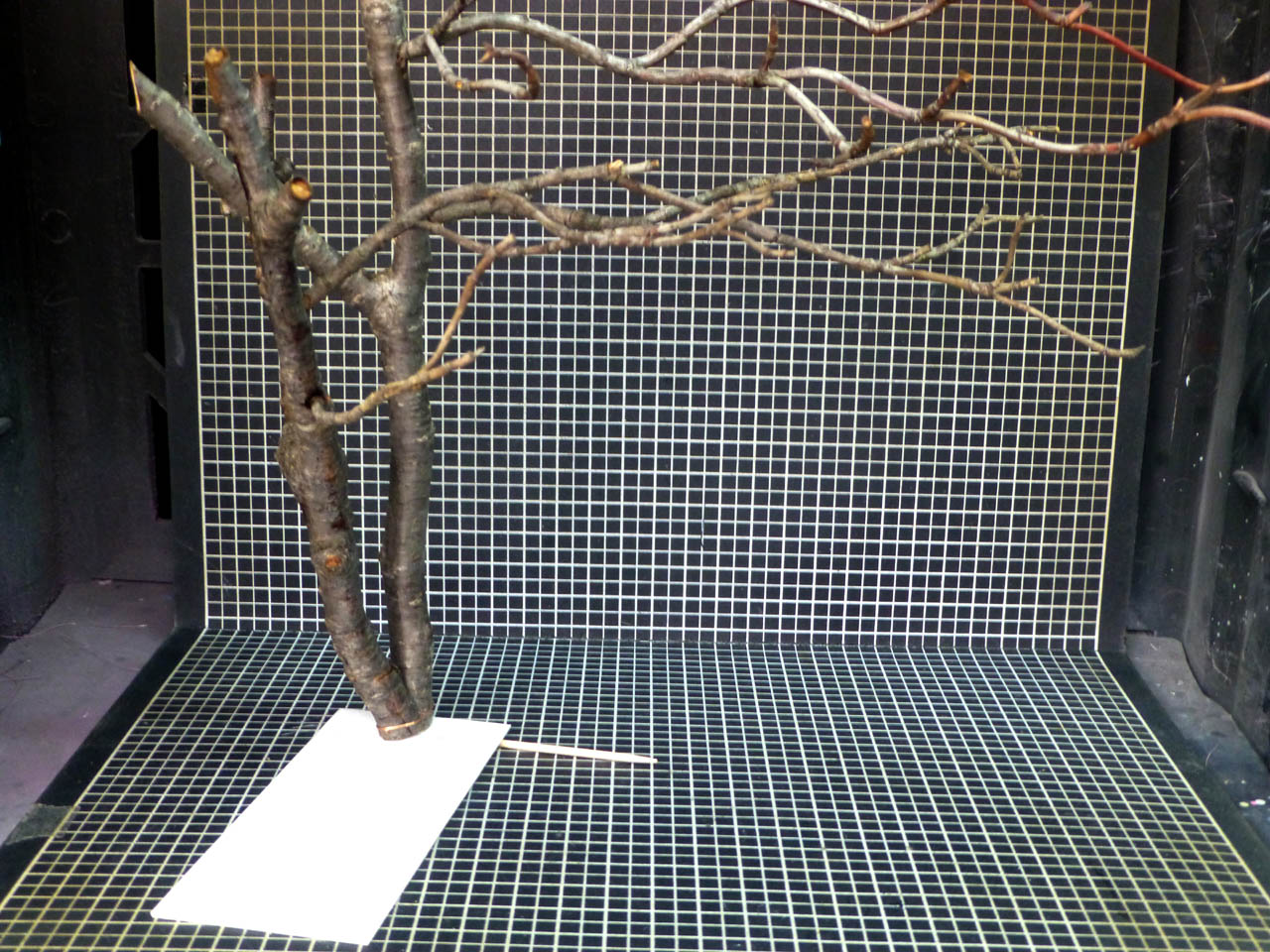
落ちていたサクラの枝を拾ってきて、実物のサクラで表現します。
生の木は水分を含んでいますので、カビが生えてくる可能性がありますし、雑菌もありますので、電子レンジでパチパチ音がし始める程度に、何度か加熱します。
見映えの良い部分を組み合わせて枝を横に広げて、光武の上に覆いかぶさるレイアウトにしました。
プラ板や爪楊枝を固定して、自立するようにしてあり、立てたまま作業が出来る様にしています。
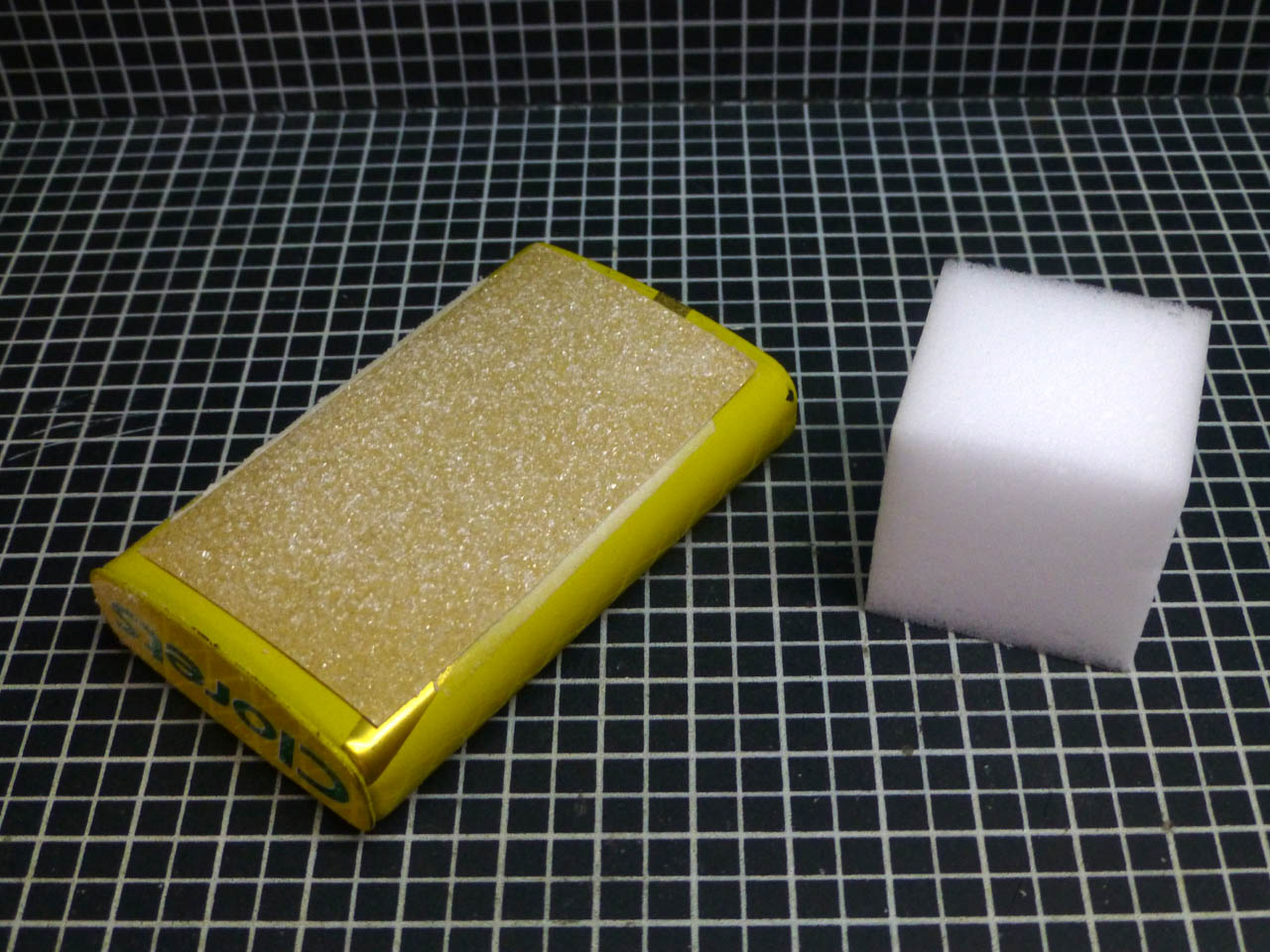
サクラの花は、激おちくんを使いました。
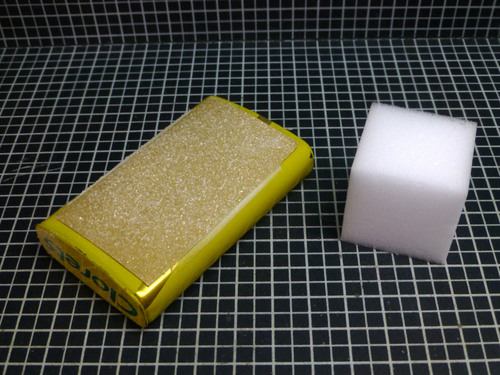
スポンジや市販のパウダーなどでは、細かいフワッとした花の様子が表現出来なかったので、細かい粉を作る事からスタートです。
ある程度弾力があり、静電気でくっ付き、安価で、加工も楽な素材ということで、激落ちくんを使っています。
硬いものに#60のペーパーを貼り付け、ここに円を描きながら激落ちくんをこすり付けて削ります。
8個くらい削りました。

激落ちくんは、ほとんどが泡なので、1個削り切っても大した量になりません。
8個ほど、ひたすら削って粉にしました。
アクリル絵の具で着色します。

白と赤で薄いピンクを作り、少し垂らして筆でかき混ぜます。
激落ちくん同士がくっ付いて、小さなダマがたくさん出来て、やがて絵の具が無くなってきますので、また少し追加してかき回します。
決してベタベタにしないのがコツです。
全体に着色したら、絵の具が乾くまでかき回し続けますが、このかき回す早さでダマの大きさが変わってきます。
ゆっくりかき回せば大きくなり、早くかき回すと細かくなります。
自然乾燥させます。

絵の具は、ほとんど激落ちくんに付着して乾燥しますが、そのまま一晩放置して、完全に乾燥させます。
ドライヤーを使うと、全部吹き飛んでしまいますので、自然乾燥させてください。
翌日、更にかき回すとダマが細かくなりますので、様子を見ながら調整します。
サクラの花は、ピンクより白に近く、花びらの付け根がほんのりピンクになっているだけです。
やっとピンクだと判断できる程度に、着色を抑えてあげました。
ちなみに、ここまでに使った激落ちくん、#60ペーパー、カップ、絵の具、すべて100均の商品です。
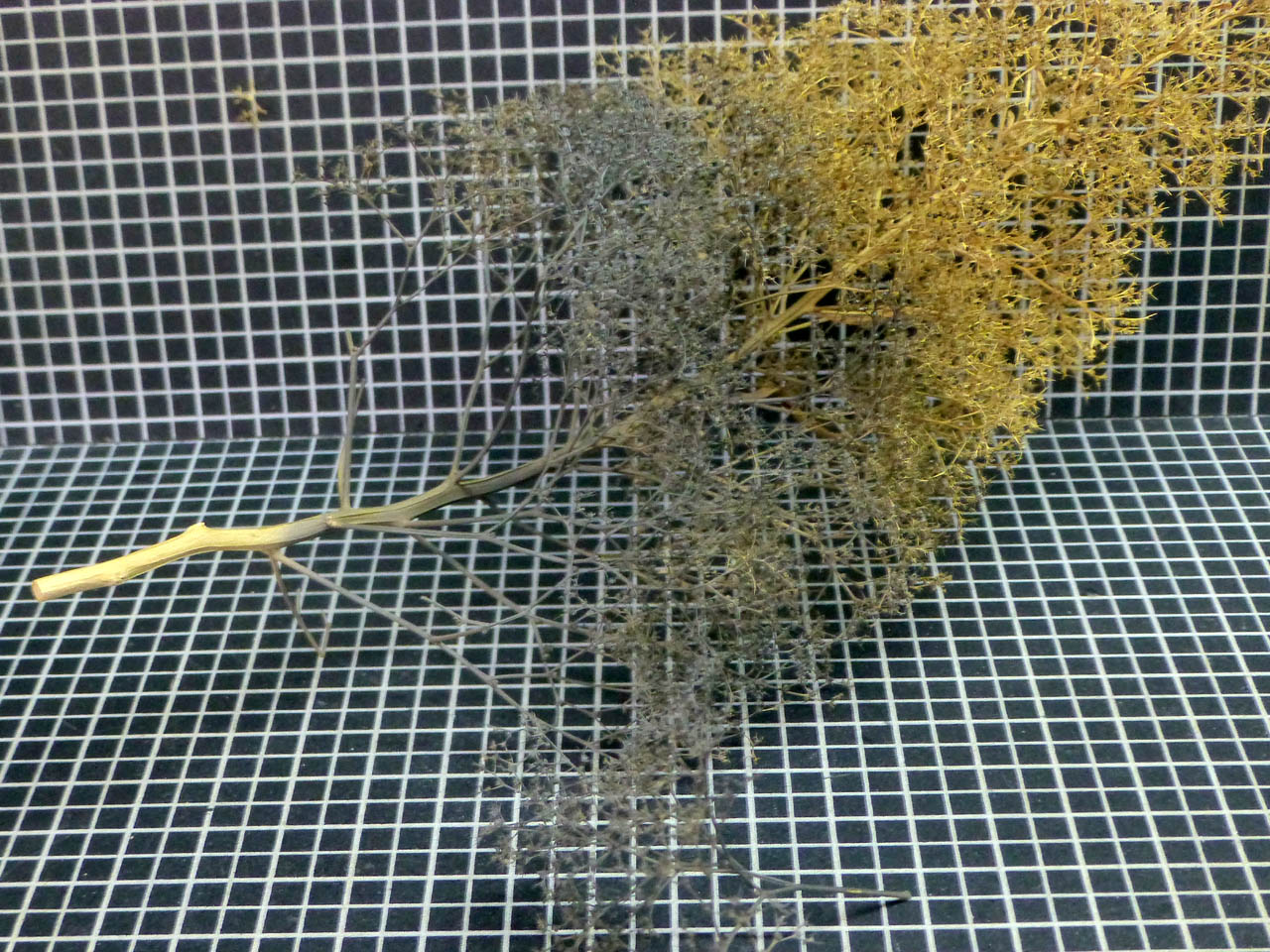
細かい枝を再現するため、オランダドライフラワーを使います。

さかつうさん(http://www.shopsakatsu.com/)で購入した、細かい枝の表現に最適なアイテム、オランダドライフラワーに着色して、小さく分けて使います。
スプレーのりを吹き付けて、サクラの花が入ったカップにチョンチョンと押し付けて接着し、トントンと叩いて余分な花びらを落とします。
どの程度のりを吹き付けるかで花びらのボリュームが変わります。
サクラの花は、枝に均等に咲くのではなく、かたまりが集まって咲きます。
また、咲いているのは一番外側になる表面だけで、枝の内部には咲きません。
サクラの木に穴を開け、様子を見ながら瞬着で固定していきます。

サクラの場合、花は埋め尽くす様には咲きません。
枝がチラ見えする程度に、カタマリが寄せ集まった感じに咲きます。

小さな花びらが集まってカタマリを作り、枝が見える程度に集まっていて、表面だけに咲いていて中はスカスカという感じにレイアウトしました。
粉から作っているので、高い解像度となり、ツブツブが集まっている質感も表現出来たのだと思います。
市販のパウダーにはサクラ色が無いので、自作してみたい方は是非お試し下さい(^^)/
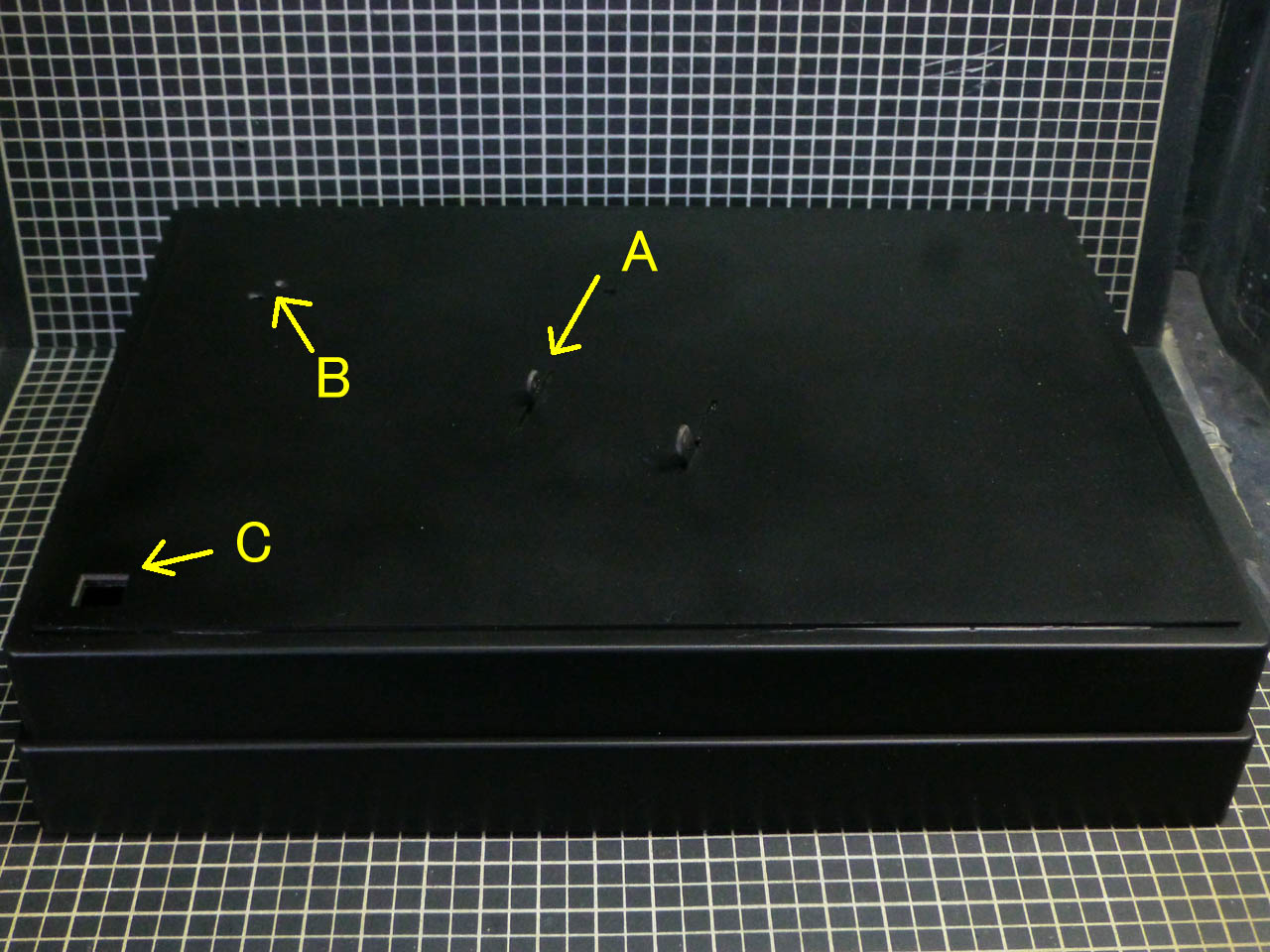
さて、ベースの方を進めます。
100均のトレーを逆さまにして、プラ板のベースを貼りました。
A リンク機構の先がスリットから出ています。
ここに光武のかかとを接続します。
B サクラの木は、裏からネジでしっかりと固定しました。
スキマにはプラ板を挟んで、グラグラしないように接着しています。
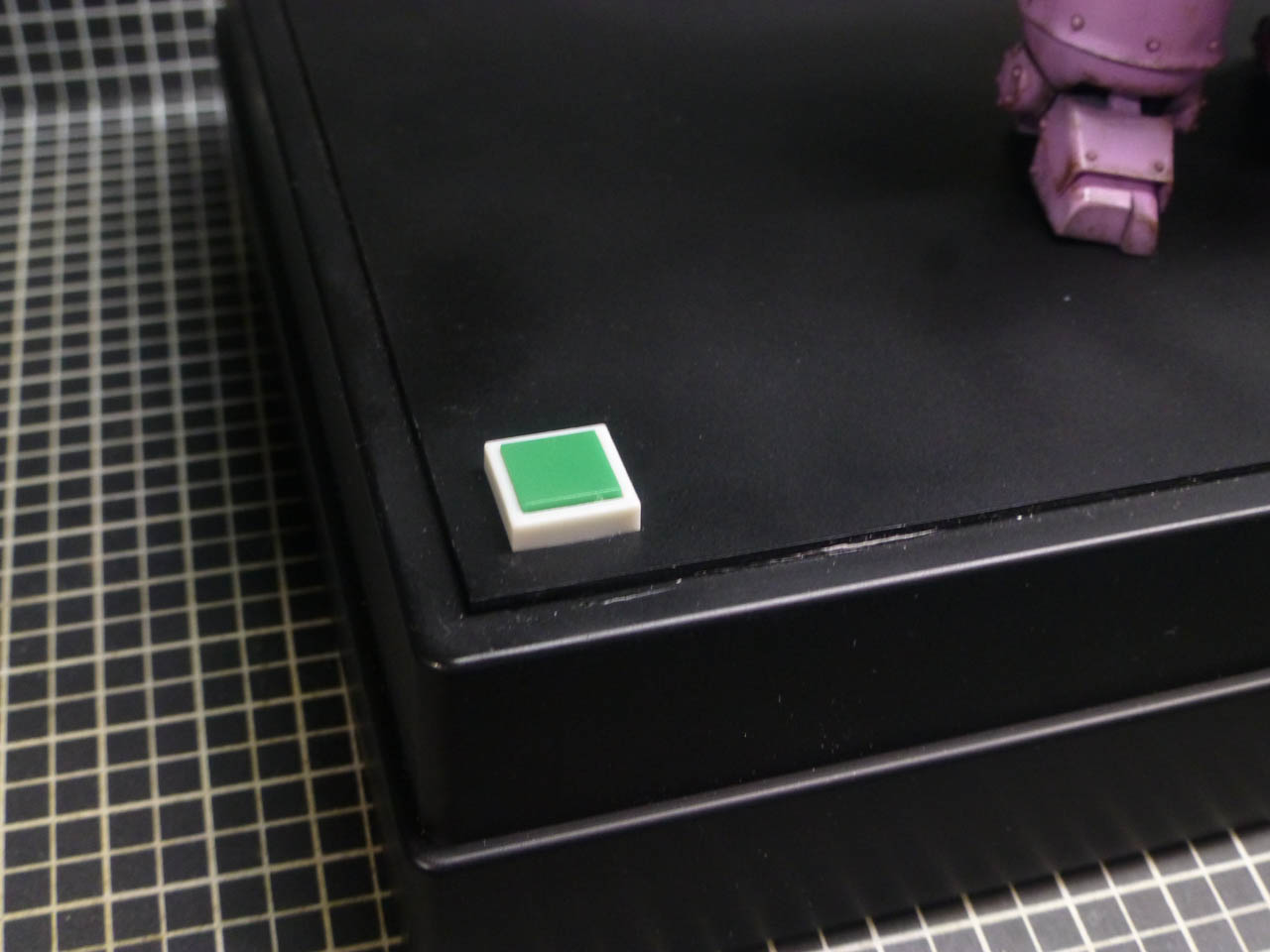
C 押しボタンスイッチを取り付ける穴も開口しました。
押しボタンは、押した間だけカメラアイを動作させるためのものです。
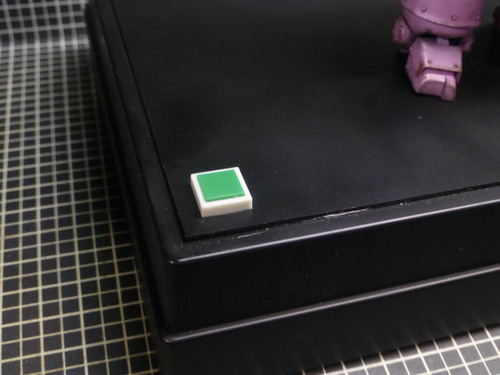
カメラアイの動作音がうるさかったので、他のモデラーのみなさんにご迷惑になると思い、押した間だけ動作する仕様にしました。
でも、実際に展示してみたら、会場の騒音で全く気にならなかったので、後程別の用途に変えています。
光武の本体を支える支柱を立てます。
光武の本体は、歩行動作の重荷にならない様に、空中に浮いた状態にします。
真鍮パイプの途中にプラ板を取り付け、高さを一定に保つ仕組みにしました。
支柱は、左右にはある程度の自由度を持たせます。
ベース内部では、支柱にスプリングが繋がり、光武を支える前方向にテンションを掛けて固定しました。
これによって、光武ま本体は高さは一定でも前後左右には動く支え方になります。
足の関節が歩いている感じに見える様に、テンションと方向を微調整しました。
特に、ヒザがカックンという動きをするとロボットらしくなりましたので、かなりの時間を掛けて調整しています。
サクラの木の根元には、根を造型しました。

サクラの枝自体はネジで固定しましたが、やはり根っこは欲しいですね。
エポパテで形を作り、塗装で誤魔化しました(^_^*)
パテで造型する際、歯ブラシでトントン叩いて、細かい凹凸をたくさん付けてあげると、サクラらしくなります。
着色は、パテの黄色を活かし、薄いブラックで少しずつ筆塗りして、黄色が残った茶色に仕上げています。
これで完成となりました。

何とか開催日の前に仕上がり、たくさんの方々に見て頂く事が出来ました。
来場してくれたみなさん、ありがとうございました(^^)/
ところが、カメラアイの配線が断線するというトラブルに見舞われました。
ポリウレタン線のままでは、長時間の動きにより金属疲労に耐えられなかったみたいです。
帰宅後、配線をビニール線に替えました。
ある程度長く配線して、配線の一部に負担が集中しないようにしています。
今度は大丈夫だと思いますが、せっかく修理するので、改良を加えました。
カメラアイの動作音が気にならない事が判明しましたので、マイコンとリレーを新たに追加して、まずはカメラアイが光って動き出してから歩行動作する様にしました。
40秒経って、カメラアイが10秒単独で動いてから30秒歩行します。
使わなくなったスイッチを利用して、待機している間でもスイッチを押せば、すぐ歩行を開始するプログラムを組みました(手動優先)
動作は良好で、あとは歩行装置が壊れるまで、歩いてくれると思います。
一番近い機会は静岡ホビーショーですが、どこかで見かける機会があれば、ぜひ遊んであげて下さいねo(^_^)o
完成状態でのカメラアイの動きや、歩行動作を動画にしました。
実際の動きをお楽しみ頂ければ幸いです。
完成画像は、別の記事としてアップします。
現在、2つのブログランキングへ参加しています。
1日1回、応援のワンクリックをぜひお願いしますm(__)m
ベースとして、100均のプラスチックのトレイを逆さまにして使用しますが、光武とさくらちゃんフィギュアだけでは寂しいです。
満開のサクラを添えて、華やかなベースにしたいと思いました。
サクラの木を製作します。
ちょうど製作している時は、サクラが咲き始める頃でした。
落ちていたサクラの枝を拾ってきて、実物のサクラで表現します。
生の木は水分を含んでいますので、カビが生えてくる可能性がありますし、雑菌もありますので、電子レンジでパチパチ音がし始める程度に、何度か加熱します。
見映えの良い部分を組み合わせて枝を横に広げて、光武の上に覆いかぶさるレイアウトにしました。
プラ板や爪楊枝を固定して、自立するようにしてあり、立てたまま作業が出来る様にしています。
サクラの花は、激おちくんを使いました。
スポンジや市販のパウダーなどでは、細かいフワッとした花の様子が表現出来なかったので、細かい粉を作る事からスタートです。
ある程度弾力があり、静電気でくっ付き、安価で、加工も楽な素材ということで、激落ちくんを使っています。
硬いものに#60のペーパーを貼り付け、ここに円を描きながら激落ちくんをこすり付けて削ります。
8個くらい削りました。

激落ちくんは、ほとんどが泡なので、1個削り切っても大した量になりません。
8個ほど、ひたすら削って粉にしました。
アクリル絵の具で着色します。

白と赤で薄いピンクを作り、少し垂らして筆でかき混ぜます。
激落ちくん同士がくっ付いて、小さなダマがたくさん出来て、やがて絵の具が無くなってきますので、また少し追加してかき回します。
決してベタベタにしないのがコツです。
全体に着色したら、絵の具が乾くまでかき回し続けますが、このかき回す早さでダマの大きさが変わってきます。
ゆっくりかき回せば大きくなり、早くかき回すと細かくなります。
自然乾燥させます。

絵の具は、ほとんど激落ちくんに付着して乾燥しますが、そのまま一晩放置して、完全に乾燥させます。
ドライヤーを使うと、全部吹き飛んでしまいますので、自然乾燥させてください。
翌日、更にかき回すとダマが細かくなりますので、様子を見ながら調整します。
サクラの花は、ピンクより白に近く、花びらの付け根がほんのりピンクになっているだけです。
やっとピンクだと判断できる程度に、着色を抑えてあげました。
ちなみに、ここまでに使った激落ちくん、#60ペーパー、カップ、絵の具、すべて100均の商品です。
細かい枝を再現するため、オランダドライフラワーを使います。
さかつうさん(http://www.shopsakatsu.com/)で購入した、細かい枝の表現に最適なアイテム、オランダドライフラワーに着色して、小さく分けて使います。
スプレーのりを吹き付けて、サクラの花が入ったカップにチョンチョンと押し付けて接着し、トントンと叩いて余分な花びらを落とします。
どの程度のりを吹き付けるかで花びらのボリュームが変わります。
サクラの花は、枝に均等に咲くのではなく、かたまりが集まって咲きます。
また、咲いているのは一番外側になる表面だけで、枝の内部には咲きません。
サクラの木に穴を開け、様子を見ながら瞬着で固定していきます。

サクラの場合、花は埋め尽くす様には咲きません。
枝がチラ見えする程度に、カタマリが寄せ集まった感じに咲きます。

小さな花びらが集まってカタマリを作り、枝が見える程度に集まっていて、表面だけに咲いていて中はスカスカという感じにレイアウトしました。
粉から作っているので、高い解像度となり、ツブツブが集まっている質感も表現出来たのだと思います。
市販のパウダーにはサクラ色が無いので、自作してみたい方は是非お試し下さい(^^)/
さて、ベースの方を進めます。
100均のトレーを逆さまにして、プラ板のベースを貼りました。
A リンク機構の先がスリットから出ています。
ここに光武のかかとを接続します。
B サクラの木は、裏からネジでしっかりと固定しました。
スキマにはプラ板を挟んで、グラグラしないように接着しています。
C 押しボタンスイッチを取り付ける穴も開口しました。
押しボタンは、押した間だけカメラアイを動作させるためのものです。
カメラアイの動作音がうるさかったので、他のモデラーのみなさんにご迷惑になると思い、押した間だけ動作する仕様にしました。
でも、実際に展示してみたら、会場の騒音で全く気にならなかったので、後程別の用途に変えています。
光武の本体を支える支柱を立てます。
光武の本体は、歩行動作の重荷にならない様に、空中に浮いた状態にします。
真鍮パイプの途中にプラ板を取り付け、高さを一定に保つ仕組みにしました。
支柱は、左右にはある程度の自由度を持たせます。
ベース内部では、支柱にスプリングが繋がり、光武を支える前方向にテンションを掛けて固定しました。
これによって、光武ま本体は高さは一定でも前後左右には動く支え方になります。
足の関節が歩いている感じに見える様に、テンションと方向を微調整しました。
特に、ヒザがカックンという動きをするとロボットらしくなりましたので、かなりの時間を掛けて調整しています。
サクラの木の根元には、根を造型しました。

サクラの枝自体はネジで固定しましたが、やはり根っこは欲しいですね。
エポパテで形を作り、塗装で誤魔化しました(^_^*)
パテで造型する際、歯ブラシでトントン叩いて、細かい凹凸をたくさん付けてあげると、サクラらしくなります。
着色は、パテの黄色を活かし、薄いブラックで少しずつ筆塗りして、黄色が残った茶色に仕上げています。
これで完成となりました。

何とか開催日の前に仕上がり、たくさんの方々に見て頂く事が出来ました。
来場してくれたみなさん、ありがとうございました(^^)/
ところが、カメラアイの配線が断線するというトラブルに見舞われました。
ポリウレタン線のままでは、長時間の動きにより金属疲労に耐えられなかったみたいです。
帰宅後、配線をビニール線に替えました。

ある程度長く配線して、配線の一部に負担が集中しないようにしています。
今度は大丈夫だと思いますが、せっかく修理するので、改良を加えました。

カメラアイの動作音が気にならない事が判明しましたので、マイコンとリレーを新たに追加して、まずはカメラアイが光って動き出してから歩行動作する様にしました。
40秒経って、カメラアイが10秒単独で動いてから30秒歩行します。
使わなくなったスイッチを利用して、待機している間でもスイッチを押せば、すぐ歩行を開始するプログラムを組みました(手動優先)
動作は良好で、あとは歩行装置が壊れるまで、歩いてくれると思います。
一番近い機会は静岡ホビーショーですが、どこかで見かける機会があれば、ぜひ遊んであげて下さいねo(^_^)o
完成状態でのカメラアイの動きや、歩行動作を動画にしました。
※BGMがあります
実際の動きをお楽しみ頂ければ幸いです。
完成画像は、別の記事としてアップします。
現在、2つのブログランキングへ参加しています。
1日1回、応援のワンクリックをぜひお願いしますm(__)m
2018-04-27 20:46
コメント(0)
光武 完成画像 [サクラ大戦 光武 製作記]
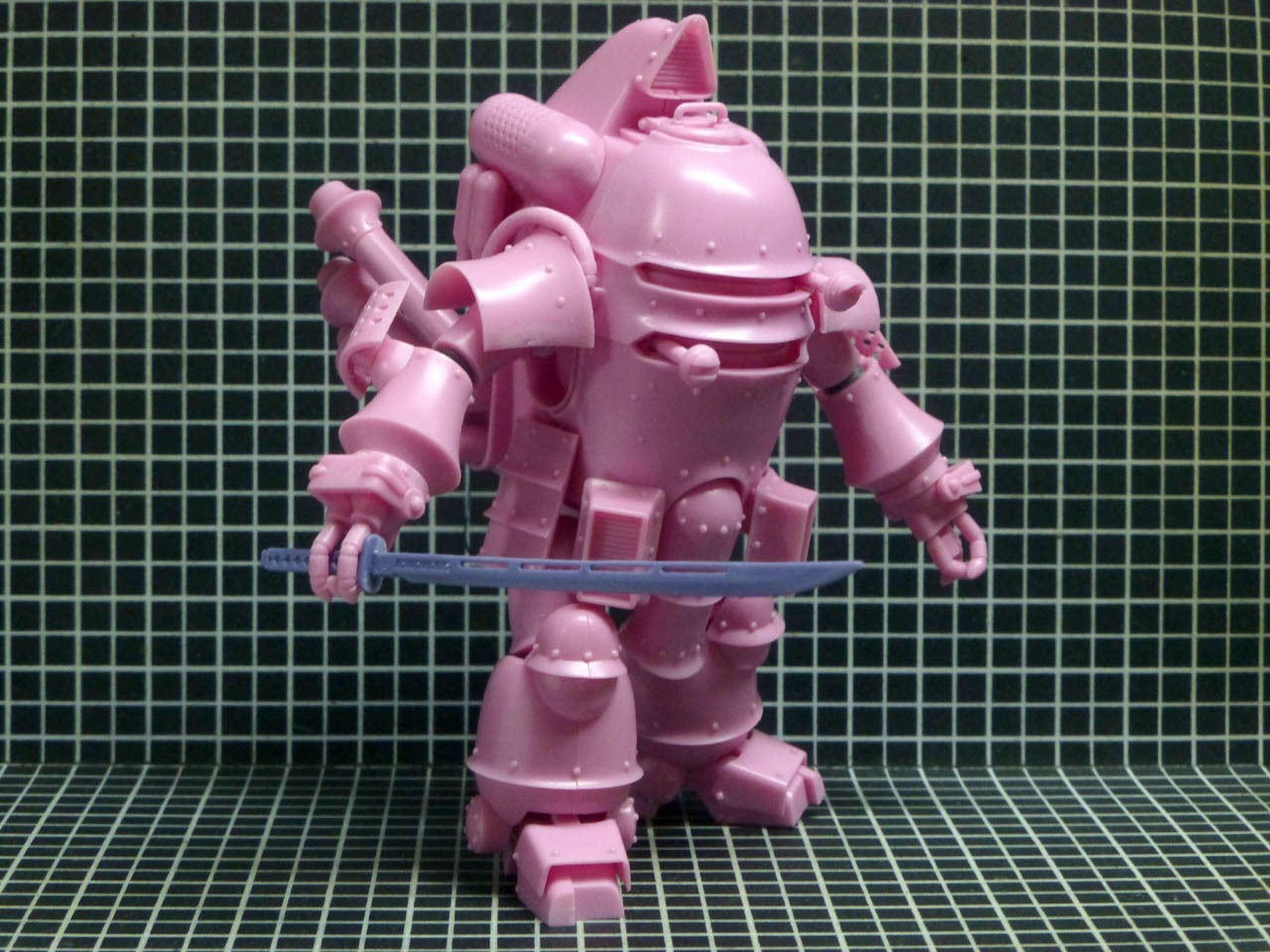
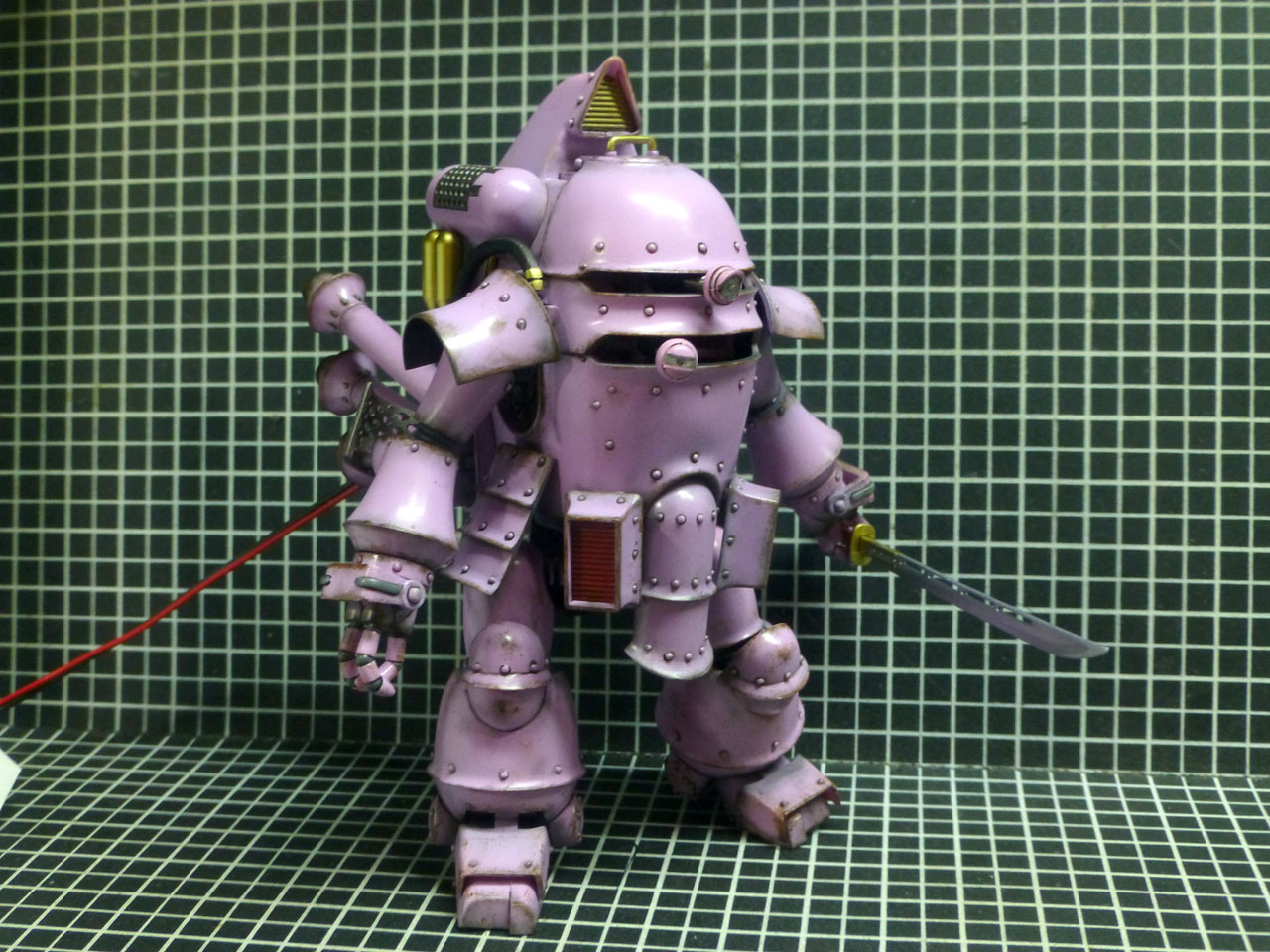
サクラ大戦 光武・改 完成画像です(^^)/
2018.04.14 コトブキヤ秋葉原館5F で開催された、16bitModels 展示会に向けて製作しました。
16bitModelsは、レトロなゲームを題材とした模型の展示会で、今回で3回目です。
たくさんの著名なモデラーがゲームの世界を見事な造型で立体化されている、とても見応えのある展示会です。
今回のテーマは「SEGA」ということで、真っ先に頭に浮かんだのが、名作「サクラ大戦」でした。
奇しくも、展示会当日にSEGAフェアで、サクラ大戦の続編発表のニュースがあり、とてもタイムリーな作品となりました。
作品はwaveさんのキットを、ほぼ素組みで政策しています。

キットに付属していた、真宮寺さくらのフィギュア(原型:林浩己氏)を添え、満開のサクラを飾り付けました。
桜は、本物の桜の枝を使い、花びらを自作しています。

激落ちくんを削って着色した花びらで、満開の桜を表現してみました。
ちゃんと桜にみえるのか、不安な気持ちで展示しましたが、来場者のみなさんはみんな優しくて、桜に見えると言って下さって嬉しかったです。
解像度の高い花びらの作り方は、他の製作にも応用が効くと思いますので、製作記の方で詳しくご紹介させて頂きました。
キットのプロポーションは良好で、ほぼ無改造です。

適度に合わせ目処理が必要な部分があり、プラモデル作りの楽しさを満喫できます。
ピンクの機体を重く見せるため、色々と塗装を工夫しています。
さくらちゃんのフィギュアも、とても良い造型で、合わせ目処理をして普通に塗装しただけで充分満足出来る仕上がりとなります。
長いリボンを追加してみました。
今回は、光らせる事より動かす事に重点を置いて製作しています。
マイコン制御のモーターを内蔵させ、カメラアイが左右に動き、歩行動作も組み込んでみました。
歩行動作は、その場で足踏みするだけですが、特殊なリンク機構を使う事でリアルな動きを持たせています。
内部の構造や動作の様子は、動画で見て頂くのが一番だと思いますので、記事中で紹介した動画をここにも貼り付けておきます。
カメラアイの動作
カメラアイの動作の様子
歩行動作の仕組み
歩行動作の様子
展示会では、たくさんの方々に見て頂けて嬉しかったです。
壊れない限り、機会があればまた展示したいと思いますo(^_^)o
現在、2つのブログランキングへ参加しています。
1日1回、応援のワンクリックをぜひお願いしますm(__)m
2018.04.14 コトブキヤ秋葉原館5F で開催された、16bitModels 展示会に向けて製作しました。
16bitModelsは、レトロなゲームを題材とした模型の展示会で、今回で3回目です。
たくさんの著名なモデラーがゲームの世界を見事な造型で立体化されている、とても見応えのある展示会です。
今回のテーマは「SEGA」ということで、真っ先に頭に浮かんだのが、名作「サクラ大戦」でした。
奇しくも、展示会当日にSEGAフェアで、サクラ大戦の続編発表のニュースがあり、とてもタイムリーな作品となりました。
作品はwaveさんのキットを、ほぼ素組みで政策しています。

キットに付属していた、真宮寺さくらのフィギュア(原型:林浩己氏)を添え、満開のサクラを飾り付けました。
桜は、本物の桜の枝を使い、花びらを自作しています。

激落ちくんを削って着色した花びらで、満開の桜を表現してみました。
ちゃんと桜にみえるのか、不安な気持ちで展示しましたが、来場者のみなさんはみんな優しくて、桜に見えると言って下さって嬉しかったです。
解像度の高い花びらの作り方は、他の製作にも応用が効くと思いますので、製作記の方で詳しくご紹介させて頂きました。
キットのプロポーションは良好で、ほぼ無改造です。

適度に合わせ目処理が必要な部分があり、プラモデル作りの楽しさを満喫できます。
ピンクの機体を重く見せるため、色々と塗装を工夫しています。
さくらちゃんのフィギュアも、とても良い造型で、合わせ目処理をして普通に塗装しただけで充分満足出来る仕上がりとなります。
長いリボンを追加してみました。
今回は、光らせる事より動かす事に重点を置いて製作しています。
マイコン制御のモーターを内蔵させ、カメラアイが左右に動き、歩行動作も組み込んでみました。
歩行動作は、その場で足踏みするだけですが、特殊なリンク機構を使う事でリアルな動きを持たせています。
内部の構造や動作の様子は、動画で見て頂くのが一番だと思いますので、記事中で紹介した動画をここにも貼り付けておきます。
カメラアイの動作
カメラアイの動作の様子
歩行動作の仕組み
※BGMがあります
歩行動作の様子
※BGMがあります
展示会では、たくさんの方々に見て頂けて嬉しかったです。
壊れない限り、機会があればまた展示したいと思いますo(^_^)o
現在、2つのブログランキングへ参加しています。
1日1回、応援のワンクリックをぜひお願いしますm(__)m
2018-04-28 22:54
コメント(6)

お知らせ~
悪質なリンクを含んだ書き込みが
多発したため、URLを含んだコメント
は書込み出来ない設定にしました。
後了承下さいm(__)m
 「初心者用電飾模型工作入門
電飾しましょっ!」
どろぼうひげ/著 大日本絵画/刊
フルカラー96ページ 定価3,240円
模型を電飾したいけど、難しいのは無理!
何からすれば良いの?という超初心者へ
最短の近道をご案内いたします!
ただ今絶賛発売中です(^^)/
「初心者用電飾模型工作入門
電飾しましょっ!」
どろぼうひげ/著 大日本絵画/刊
フルカラー96ページ 定価3,240円
模型を電飾したいけど、難しいのは無理!
何からすれば良いの?という超初心者へ
最短の近道をご案内いたします!
ただ今絶賛発売中です(^^)/
 「電飾しましょっ!2 PIC編」好評発売中
B5判 88ページ 2500円+税
本書内容に不具合がある箇所についての
正誤表がMODELKASTENにて公開中です
PDFをダウンロードの上、ご活用下さい
正誤表のダウンロードはこちら
「電飾しましょっ!2 PIC編」好評発売中
B5判 88ページ 2500円+税
本書内容に不具合がある箇所についての
正誤表がMODELKASTENにて公開中です
PDFをダウンロードの上、ご活用下さい
正誤表のダウンロードはこちら
 「電飾しましょっ!3 Tips編」
B5判 107ページ 3200円+税
もう光るだけでは物足りない電飾モデラ
ーの皆さんへチョイテクを多数ご紹介!
PICでのモーター制御や調光まで網羅し
た、幅広く電飾を楽しめる一冊です(^^)/
「電飾しましょっ!3 Tips編」
B5判 107ページ 3200円+税
もう光るだけでは物足りない電飾モデラ
ーの皆さんへチョイテクを多数ご紹介!
PICでのモーター制御や調光まで網羅し
た、幅広く電飾を楽しめる一冊です(^^)/
 doro_hige という名前でさえずってます。
フォローよろしくです(^^♪
Follow @doro_hige
doro_hige という名前でさえずってます。
フォローよろしくです(^^♪
Follow @doro_hige
 DORO☆OFFの公式ブログです
展示会のサポートもこちらですよ
DORO☆OFFの公式ブログです
展示会のサポートもこちらですよ
多発したため、URLを含んだコメント
は書込み出来ない設定にしました。
後了承下さいm(__)m
| 「電飾しましょっ!」絶賛発売中! |
「初心者用電飾模型工作入門
電飾しましょっ!」
どろぼうひげ/著 大日本絵画/刊
フルカラー96ページ 定価3,240円
模型を電飾したいけど、難しいのは無理!
何からすれば良いの?という超初心者へ
最短の近道をご案内いたします!
ただ今絶賛発売中です(^^)/
| 「電飾しましょっ!2 PIC編」発売中! |
「電飾しましょっ!2 PIC編」好評発売中
B5判 88ページ 2500円+税
本書内容に不具合がある箇所についての
正誤表がMODELKASTENにて公開中です
PDFをダウンロードの上、ご活用下さい
正誤表のダウンロードはこちら
| 「電飾しましょっ!3 Tips編」発売中! |
「電飾しましょっ!3 Tips編」
B5判 107ページ 3200円+税
もう光るだけでは物足りない電飾モデラ
ーの皆さんへチョイテクを多数ご紹介!
PICでのモーター制御や調光まで網羅し
た、幅広く電飾を楽しめる一冊です(^^)/
| ツイッターやってます |
doro_hige という名前でさえずってます。
フォローよろしくです(^^♪
Follow @doro_hige
| DORO☆OFF公式ブログ |
DORO☆OFFの公式ブログです
展示会のサポートもこちらですよ
模型誌 掲載作品
各模型誌に掲載された作品です
 ModelGraphics No.292 2009.3 に掲載されました。
詳細はカテゴリー「スター・デストロイヤー 製作記」をご覧下さい。
ModelGraphics No.292 2009.3 に掲載されました。
詳細はカテゴリー「スター・デストロイヤー 製作記」をご覧下さい。
 2009.4 キャラクターエイジ VOL.02 に掲載されました。
詳細はカテゴリー「CA掲載ジオラマ制作記」をご覧下さい。
2009.4 キャラクターエイジ VOL.02 に掲載されました。
詳細はカテゴリー「CA掲載ジオラマ制作記」をご覧下さい。
 2009.9 キャラクターエイジ VOL.03 に掲載されました。
詳細はカテゴリー「CA3 エコー基地 製作記」をご覧下さい。
2009.9 キャラクターエイジ VOL.03 に掲載されました。
詳細はカテゴリー「CA3 エコー基地 製作記」をご覧下さい。
 2009.12 ModelGraphix No.302 に掲載されました。
詳細はカテゴリー「FM SnowSpeeder 製作記」をご覧下さい。
2009.12 ModelGraphix No.302 に掲載されました。
詳細はカテゴリー「FM SnowSpeeder 製作記」をご覧下さい。
 2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「CA4 HomeOne 製作記」をご覧下さい。
2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「CA4 HomeOne 製作記」をご覧下さい。
 2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「A-Wing Fighter製作記」をご覧下さい。
2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「A-Wing Fighter製作記」をご覧下さい。
 2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
 2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
 2011.05キャラクターエイジVol.06に掲載
詳細はCA6 1/48 TIE FIGHTER 製作記
をご覧下さい。
ランダム閃光発生回路の説明動画へ
2011.05キャラクターエイジVol.06に掲載
詳細はCA6 1/48 TIE FIGHTER 製作記
をご覧下さい。
ランダム閃光発生回路の説明動画へ
 2012.03 ModelGraphix 2012.04
に掲載させて頂きました。
詳細はNaboo StarFighter 製作記
をご覧下さい。
2012.03 ModelGraphix 2012.04
に掲載させて頂きました。
詳細はNaboo StarFighter 製作記
をご覧下さい。
 2012.11 Scale World Vol.2 に掲載
させて頂きました。
DVD付きで動画も楽しめます(^^)/
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
2012.11 Scale World Vol.2 に掲載
させて頂きました。
DVD付きで動画も楽しめます(^^)/
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
 2013.10 HobbyJapan 2013.11 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
2013.10 HobbyJapan 2013.11 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
 2013.10 ModelGraphix 2013.11に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
詳しい製作記はこちら
2013.10 ModelGraphix 2013.11に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
詳しい製作記はこちら
 2013.11 ModelGraphix 2013.12 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
2013.11 ModelGraphix 2013.12 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
") 2013.12 ModelGraphix 2014.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
製作記はこちら(Build Article Here)
2013.12 ModelGraphix 2014.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
製作記はこちら(Build Article Here)
 2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像と動画が表示されます
2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像と動画が表示されます
 2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
") 2014.04 ModelGraphix 2014.05 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
2014.04 ModelGraphix 2014.05 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 2014.05 ModelGraphix 2014.06 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
2014.05 ModelGraphix 2014.06 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 2014.06 HobbyJapan 2014.07 に
掲載させて頂きました。
バルグレイの完成画像はこちら
デバッケの完成画像はこちら
2014.06 HobbyJapan 2014.07 に
掲載させて頂きました。
バルグレイの完成画像はこちら
デバッケの完成画像はこちら
 2014.08 HobbyJapan 2014.08に
掲載させて頂きました。
シャングリ・ラーの完成画像と動画はこちら
デラメア級の完成画像はこちら
2014.08 HobbyJapan 2014.08に
掲載させて頂きました。
シャングリ・ラーの完成画像と動画はこちら
デラメア級の完成画像はこちら
 ModelGraphix 2014.09 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
ModelGraphix 2014.09 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
 ModelGraphix 2014.11 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix 2014.11 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 HobbyJapan 2015.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
HobbyJapan 2015.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2015.02 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌 2015.02 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 HobbyJapan誌 2015.02 に掲載、更に
作例集”星巡る方舟”編に掲載頂きました
ギミック満載の動画を公開しています
HobbyJapan誌 2015.02 に掲載、更に
作例集”星巡る方舟”編に掲載頂きました
ギミック満載の動画を公開しています

 HobbyJapan誌 2015.03 に掲載。更に
作例集”星巡る方舟”編に掲載頂きました
上の画像クリックで完成画像が表示されます
HobbyJapan誌 2015.03 に掲載。更に
作例集”星巡る方舟”編に掲載頂きました
上の画像クリックで完成画像が表示されます
 ModelGraphix誌2015.05 No.366 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌2015.05 No.366 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2015.08 No.369 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌 2015.08 No.369 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌2015.06 No.367 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌2015.06 No.367 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2015.09 No.370 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌 2015.09 No.370 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 HobbyJapan誌 2015.11 No.557 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
HobbyJapan誌 2015.11 No.557 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2016.01 No.374 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌 2016.01 No.374 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2016.02 No.375 に
掲載させて頂きました。
上の画像クリックで完成画像がが表示されます
ModelGraphix誌 2016.02 No.375 に
掲載させて頂きました。
上の画像クリックで完成画像がが表示されます
 ModelGraphix誌 2016.03 No.376に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
ModelGraphix誌 2016.03 No.376に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
 HobbyJapan誌 2016.03 No.561に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
HobbyJapan誌 2016.03 No.561に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
 ModelArt別冊、艦船模型スペシャル誌
2016 SPRING No.59 に
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
ModelArt別冊、艦船模型スペシャル誌
2016 SPRING No.59 に
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJAPAN誌 2016.04 No.561へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJAPAN誌 2016.04 No.561へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.06 No.564へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.06 No.564へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 ModelGraphix誌 2016.07 No.380 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
ModelGraphix誌 2016.07 No.380 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.07 No.565 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.07 No.565 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.09 No.567 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.09 No.567 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.10 No.568 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.10 No.568 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.11 No.569 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.11 No.569 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.12 No570 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.12 No570 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.02 No.572 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2017.02 No.572 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 ModelGraphix誌 2017.02 No.387 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
ModelGraphix誌 2017.02 No.387 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 ModelGraphix誌 2017.04 No.389 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
ModelGraphix誌 2017.04 No.389 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
完成画像はありません。
上の画像クリックで製作記
が表示されます
HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
完成画像はありません。
上の画像クリックで製作記
が表示されます
| Lot No.S-001 スターデストロイヤー |
ModelGraphics No.292 2009.3 に掲載されました。
詳細はカテゴリー「スター・デストロイヤー 製作記」をご覧下さい。
| Lot No.S-002 ホス&DSトレンチバトル |
2009.4 キャラクターエイジ VOL.02 に掲載されました。
詳細はカテゴリー「CA掲載ジオラマ制作記」をご覧下さい。
| Lot No.S-003 REBEL BASE |
2009.9 キャラクターエイジ VOL.03 に掲載されました。
詳細はカテゴリー「CA3 エコー基地 製作記」をご覧下さい。
| Lot No.S-004 FM SnowSpeeder |
2009.12 ModelGraphix No.302 に掲載されました。
詳細はカテゴリー「FM SnowSpeeder 製作記」をご覧下さい。
| Lot No.S-005 HomeOne |
2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「CA4 HomeOne 製作記」をご覧下さい。
| Lot No.S-006 A-Wing StarFighter |
2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「A-Wing Fighter製作記」をご覧下さい。
| Lot No.S-007 CA5 VC4 シャトル |
2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
| Lot No.S-008 CA5 VC4 スレーブ1 |
2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
| Lot No.S-009 CA6 TIE FIGHTER |
2011.05キャラクターエイジVol.06に掲載
詳細はCA6 1/48 TIE FIGHTER 製作記
をご覧下さい。
ランダム閃光発生回路の説明動画へ
| Lot No.S-010 Naboo StarFighter |
2012.03 ModelGraphix 2012.04
に掲載させて頂きました。
詳細はNaboo StarFighter 製作記
をご覧下さい。
| Lot No.S-011 フジミ SPINNER |
2012.11 Scale World Vol.2 に掲載
させて頂きました。
DVD付きで動画も楽しめます(^^)/
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
| Lot No.S-012 ゲルバデス級 ダロルド |
2013.10 HobbyJapan 2013.11 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
| Lot No.S-013 Viper Mk.Ⅱ |
2013.10 ModelGraphix 2013.11に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
詳しい製作記はこちら| Lot No.S-014 次元潜航艦 UX-01 |
2013.11 ModelGraphix 2013.12 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
| Lot No.S-015 BS GALACTICA |
2013.12 ModelGraphix 2014.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
製作記はこちら(Build Article Here) | Lot No.S-016 ヤマト2199 |
2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像と動画が表示されます
| Lot No.S-017 シュデルグ |
2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-018 BS PEGASUS |
2014.04 ModelGraphix 2014.05 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-019 ギガント |
2014.05 ModelGraphix 2014.06 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-020 バルグレイ |
2014.06 HobbyJapan 2014.07 に
掲載させて頂きました。
バルグレイの完成画像はこちら
デバッケの完成画像はこちら
| Lot No.S-021 シャングリ・ラー |
2014.08 HobbyJapan 2014.08に
掲載させて頂きました。
シャングリ・ラーの完成画像と動画はこちら
デラメア級の完成画像はこちら
| Lot No.S-022 AU-O9 アナライザー |
ModelGraphix 2014.09 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
| Lot No.S-023 ドメラーズⅢvsヤマト |
ModelGraphix 2014.11 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-024 N-ノーチラス号 |
HobbyJapan 2015.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-025 X-WING RED 3 |
ModelGraphix誌 2015.02 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-026 1/500 ヤマト2199 |
 HobbyJapan誌 2015.02 に掲載、更に
作例集”星巡る方舟”編に掲載頂きました
ギミック満載の動画を公開しています
HobbyJapan誌 2015.02 に掲載、更に
作例集”星巡る方舟”編に掲載頂きました
ギミック満載の動画を公開しています
| Lot No.S-027 ミランガル |
HobbyJapan誌 2015.03 に掲載。更に
作例集”星巡る方舟”編に掲載頂きました
上の画像クリックで完成画像が表示されます
| Lot No.S-028 AT-ST |
ModelGraphix誌2015.05 No.366 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-029 バラクーダ号 |
ModelGraphix誌 2015.08 No.369 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-030 1/48 X-WING |
ModelGraphix誌2015.06 No.367 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-031 Y-WING GOLD2 |
ModelGraphix誌 2015.09 No.370 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-032 マクロス要塞艦 |
HobbyJapan誌 2015.11 No.557 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-033 EP.Ⅶ ファルコン |
ModelGraphix誌 2016.01 No.374 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-034 グフカスタム |
ModelGraphix誌 2016.02 No.375 に
掲載させて頂きました。
上の画像クリックで完成画像がが表示されます
| Lot No.S-035 ハンタキラータンク |
ModelGraphix誌 2016.03 No.376に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
| Lot No.S-036 メカコレ ヤマト・ランベア |
HobbyJapan誌 2016.03 No.561に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
| Lot No.S-037 護衛艦あきづき |
ModelArt別冊、艦船模型スペシャル誌
2016 SPRING No.59 に
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-038 アスタコNEO |
HobbyJAPAN誌 2016.04 No.561へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-039 VM スタデ&X-WING |
HobbyJapan誌 2016.06 No.564へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-040 バンダイ A-WING |
ModelGraphix誌 2016.07 No.380 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-041 サンダーバード 2・4 号 |
HobbyJapan誌 2016.07 No.565 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-042 はしご付き消防車 |
HobbyJapan誌 2016.09 No.567 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-043 VM Poe'sX & FO TIE |
HobbyJapan誌 2016.10 No.568 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-044 マクロスエリシオン |
HobbyJapan誌 2016.11 No.569 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-045 VM Y-WING |
HobbyJapan誌 2016.12 No570 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-046 VM ファルコン |
HobbyJapan誌 2017.02 No.572 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-047 R.o. X-WING RED1 |
ModelGraphix誌 2017.02 No.387 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-048 VM タイセット |
HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-049 U-WING & タイセット |
HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-050 FMタイガーモス |
ModelGraphix誌 2017.04 No.389 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-051 アンドロメダ2202 |
HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-052 レイズナーヘッド |
HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
完成画像はありません。
上の画像クリックで製作記
が表示されます
製作記 STAR WARS 作品
| Lot No.001 ミレニアム・ファルコン |

| Lot No.003 SLAVE 1 |

| Lot No.004 X-WING |

| Lot No.007 シャトル・タイデリアム |
 2007-06-06 完成しました。
完成画像はこちら
カテゴリー「シャトル・タイデリアム製作記」
2007-06-06 完成しました。
完成画像はこちら
カテゴリー「シャトル・タイデリアム製作記」
| Lot No.011 Y-Wing |
 2007-08-21 完成しました。
完成画像はこちら
カテゴリー「Y-Wing製作記」
2007-08-21 完成しました。
完成画像はこちら
カテゴリー「Y-Wing製作記」
| Lot No.012 スター・デストロイヤー |
 2008-05-19 完成しました。
「模型誌掲載作品」へ移動しました。
2008-05-19 完成しました。
「模型誌掲載作品」へ移動しました。
| Lot No.014 JEDI STAR FIGHTER |
 2008-06-28 完成しました。
完成画像はこちら
カテゴリー「JEDI STAR FIGHTER 製作記」
2008-06-28 完成しました。
完成画像はこちら
カテゴリー「JEDI STAR FIGHTER 製作記」
| Lot No.016 mpc AT-AT |
 2008-09-06 完成しました。
完成画像はこちら
カテゴリー「mpc AT-AT 製作記」
2008-09-06 完成しました。
完成画像はこちら
カテゴリー「mpc AT-AT 製作記」
| Lot No.017 TIE INTERCEPTOR |
 2008-10-10 完成しました。
完成画像はこちら
2008-10-10 完成しました。
完成画像はこちら
| Lot No.018 Deth Star Surface |
 2008-10-27 完成しました。
完成画像はこちら
2008-10-27 完成しました。
完成画像はこちら
| Lot No.019 A-Wing Fighter |
 2008.12.16 完成しました。。
完成画像はこちら
カテゴリー「A-Wing Fighter 製作記」
2008.12.16 完成しました。。
完成画像はこちら
カテゴリー「A-Wing Fighter 製作記」
| Lot No.022 1/48 X-Wing Fighter |
 2009-05-15 完成しました。
完成画像はこちら
2009-05-15 完成しました。
完成画像はこちら| Lot No.027 FM 1/144 Falcon |
 2010.08.20 完成しました。
完成画像はこちら
カテゴリー「FM 144ファルコン 製作記」
2010.08.20 完成しました。
完成画像はこちら
カテゴリー「FM 144ファルコン 製作記」
| Lot No.031 VC4 スターデストロイヤー |
 完成画像はこちら
カテゴリー「VC4 スター・デストロイヤー 製作記」
完成画像はこちら
カテゴリー「VC4 スター・デストロイヤー 製作記」
| Lot No.021 Death Star Ⅱ |
 デススターⅡをフルスクラッチしました。
完成画像はこちら
製作過程を交えた完成ムービーはこちら
カテゴリー「Death Star Ⅱ 製作記」
デススターⅡをフルスクラッチしました。
完成画像はこちら
製作過程を交えた完成ムービーはこちら
カテゴリー「Death Star Ⅱ 製作記」
製作記 スタジオジブリ 作品







製作記 キャラクターもの
| Lot No.002 頭文字Dトレノ |

| Lot No.008 ザク Ver2.0 |
 2007-06-22 完成しました。
完成画像はこちら
カテゴリー「ザクVer2.0製作記」では、制作過程を紹介しています。
2007-06-22 完成しました。
完成画像はこちら
カテゴリー「ザクVer2.0製作記」では、制作過程を紹介しています。
| Lot No.015 AVP2エイリアン リペイント |
 2008-07-05 完成しました。
完成画像はこちら
カテゴリー「ALIEN リペイント」では、制作過程を紹介しています。
2008-07-05 完成しました。
完成画像はこちら
カテゴリー「ALIEN リペイント」では、制作過程を紹介しています。
| Lot No.023 アオシマ T-800 |
 2009-09-07 完成しました。
完成画像はこちら
首の電動化の動画はこちら
2009-09-07 完成しました。
完成画像はこちら
首の電動化の動画はこちら
| Lot No.024 MGアイマス機 双海真美 |
 2009-12-20 完成しました。
完成画像はこちら
2009-12-20 完成しました。
完成画像はこちら
| Lot No.026 Ma.K ポーラーベアー |
 2010-05-04 完成しました。
完成画像はこちら
2010-05-04 完成しました。
完成画像はこちら
| Lot No.028 ロボコップ ED-209 |
 2010-10-02 完成しました。
完成画像はこちら
2010-10-02 完成しました。
完成画像はこちら
| Lot No.034 Ma.k.クレーテ |
 完成画像はこちら
完成画像はこちら
| Lot No.035 LBX パンドラ |
 完成画像はこちら
完成画像はこちら
| Lot No.037 フジミ SPINNER |
 2012-08-30 完成しました。
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
2012-08-30 完成しました。
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
| Lot No.038 ごあいさつダンボー |
 上の画像クリックで製作記と動画へGo
上の画像クリックで製作記と動画へGo
| Lot No.041 LastExile ヴァンシップ |
 2013-03-03 完成しました。
画像クリックで完成画像と動画へGo
2013-03-03 完成しました。
画像クリックで完成画像と動画へGo
| Lot No.043 デコトラ「天下御免」 |
 2013.1頃に完成しています
画像クリックで完成画像と動画へGo
2013.1頃に完成しています
画像クリックで完成画像と動画へGo
製作記 宇宙船など
| Lot No.005 コスモゼロ |
 2007-03-03 完成しました。
完成画像はこちら
2007-03-03 完成しました。
完成画像はこちら
| Lot No.006 ブラックタイガー |
 2007-03-12 完成しました♪
完成画像はこちら
2007-03-12 完成しました♪
完成画像はこちら
| Lot No.009 BIRD OF PREY |
 2007-07-08 完成しました♪
完成画像はこちら
2007-07-08 完成しました♪
完成画像はこちら
| Lot No.045 メカコレヤマト2199 |
 2014-05-31 完成しました♪
完成画像と発射の動画はこちら
2014-05-31 完成しました♪
完成画像と発射の動画はこちら
| Lot No.010 ノストロモ号 |
 2005-12-18 完成しました♪
完成画像はこちら
2005-12-18 完成しました♪
完成画像はこちら
| Lot No.013 たまごスペースシャトル |
 2008-06-05 完成しました♪
完成画像はこちら
2008-06-05 完成しました♪
完成画像はこちら
| Lot No.025 DVD特典 宇宙戦艦ヤマト |
 2010-04-05 完成しました。
完成画像はこちら
2010-04-05 完成しました。
完成画像はこちら
| Lot No.033 Space Clipper |
 2012-02-13 完成しました。
完成画像はこちら
2012-02-13 完成しました。
完成画像はこちら
| Lot No.039 アルカディア号 |
 1012-11-20完成しました。
完成画像はこちら
1012-11-20完成しました。
完成画像はこちら| Lot No.048 シルフィード |
 16BitModels用として製作しました
2017.09完成しました。
16BitModels用として製作しました
2017.09完成しました。
