リモコン化 [デロリアン製作記]
デロリアンの走行/飛行形態の切替を、リモコン化しました。
※この記事は、市販品の改造になります。 実施される場合は、自己責任でお願いします。
車体下にスイッチを取り付け、走行/飛行形態の切替を可能にしましたが、見えない場所なので、どうも押しにくいです。
そこで、リモコン操作を可能にしてみました。
リモコン回路は、手っ取り早く100均のリモコンライトを流用しちゃいます。

電源ONで白色LEDが点灯し、赤・緑・青のLEDとその中間色をボタン一発で切り替えられて、しかも自動変化モードもあるので、ナカナカ楽しめるイルミネーションです。
今回はスイッチ1個をONにするだけで良いので、白色LEDを光らせる部分だけを使います。
実は今月のModelGraphix誌に掲載して頂いたED-209も、この回路を使ってリモコン化しています。
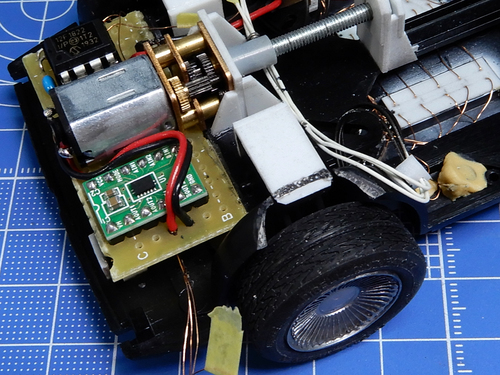
受信機を分解して、回路を取り出しました。
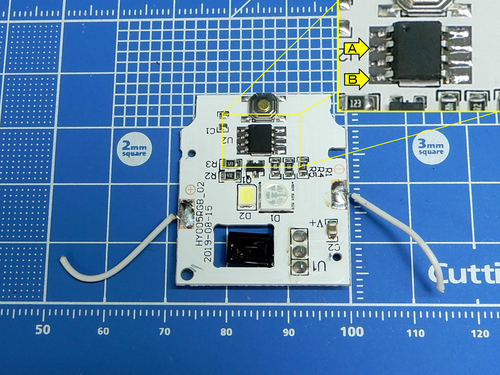
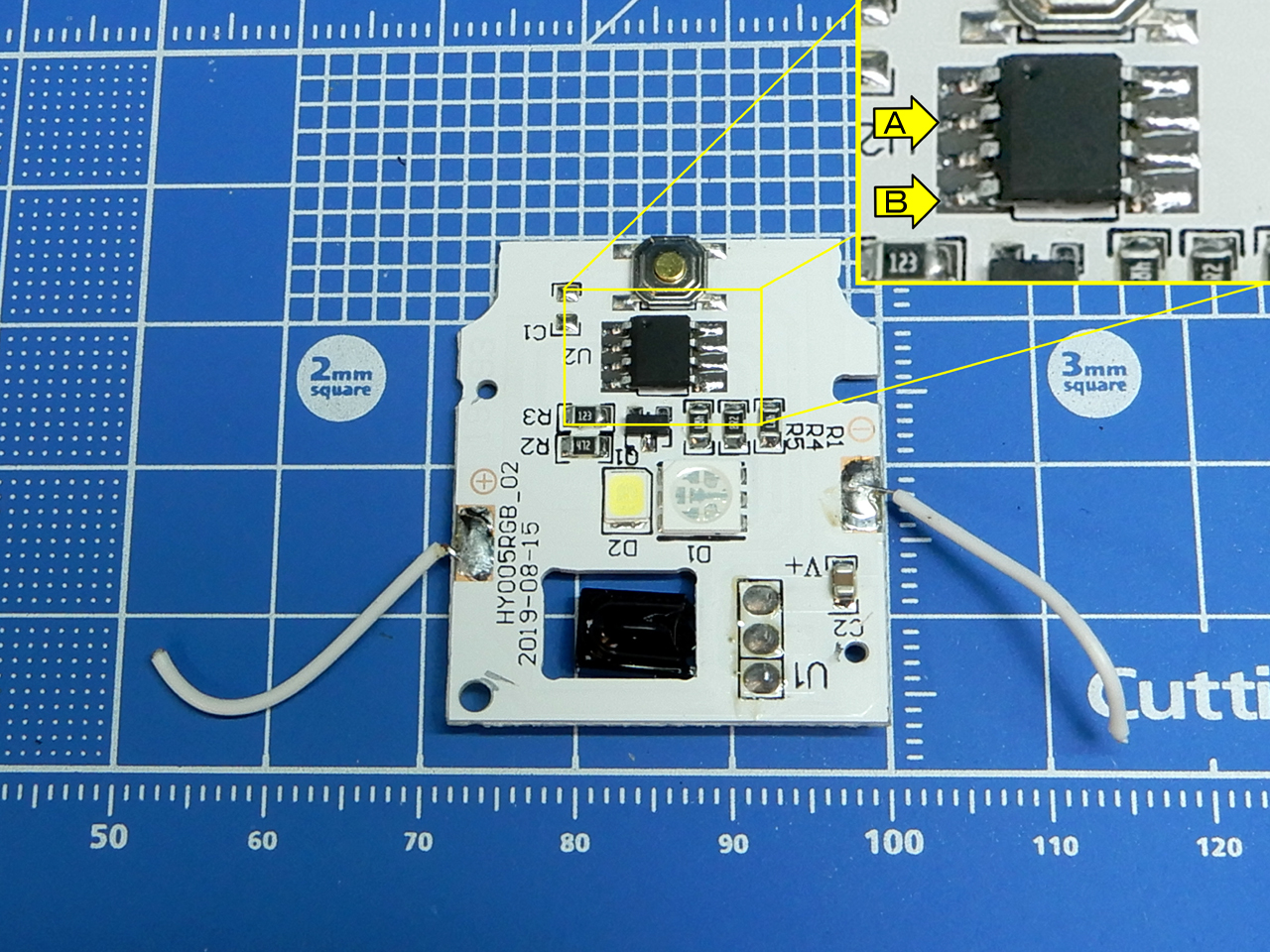
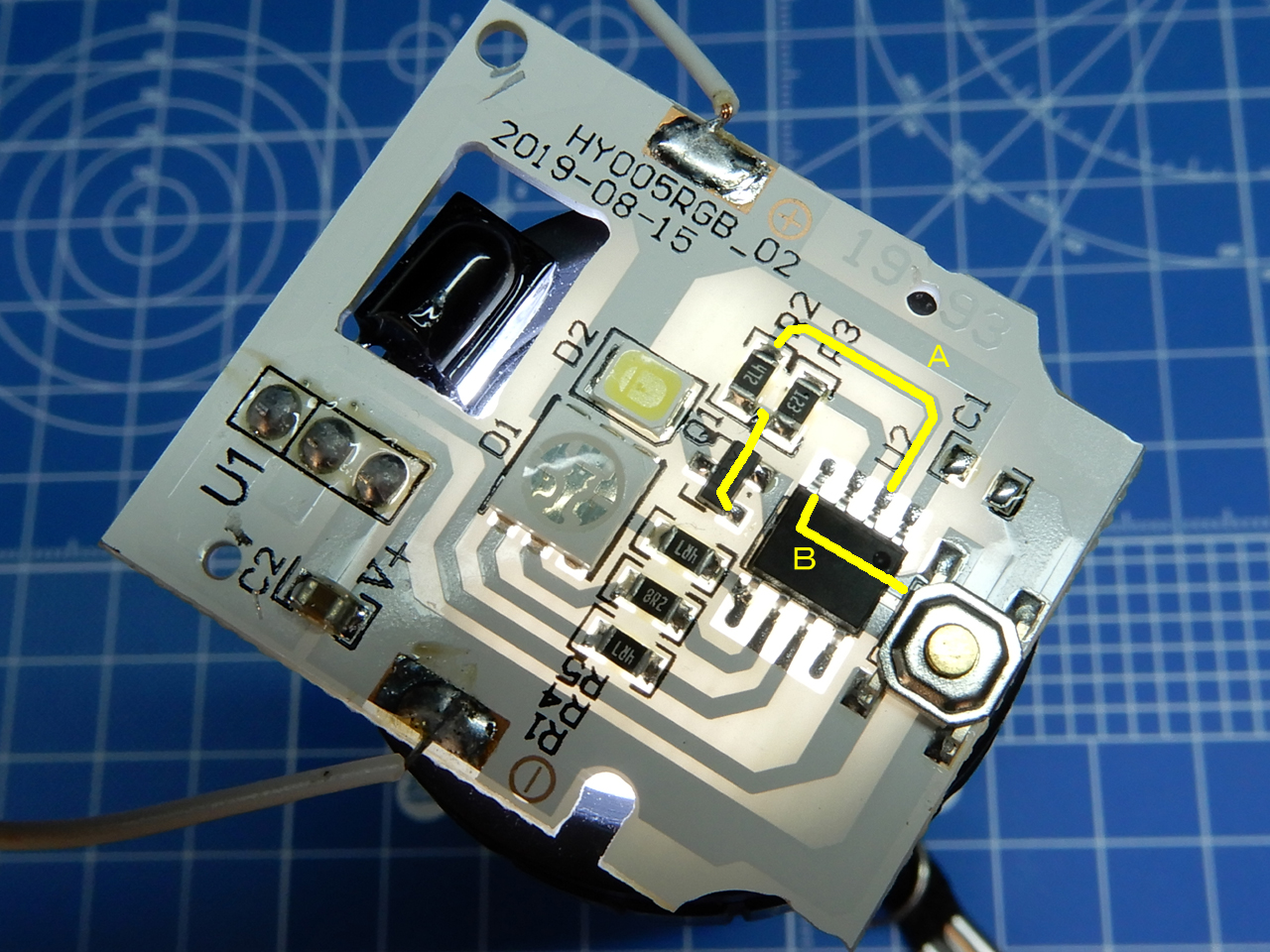
8本足のICがマイコンで、赤外線で受信した信号を判別して白色LEDやフルカラーLEDを制御しているのが判ります。
基板のパターンを見ると、マイコンのA(2番端子)が「H」(5V)になると、白色LEDが点灯するようです。
でも、点灯したままでは、ずっと「H」のままですので、困りますね。
元の消えた状態に戻ってくれないと、スイッチがずっとONのままです。
このイルミネーションライトは、白色LEDが点灯してから乳白色のドームを押す度に色が変わって、5回押すと全てのLEDが消えて、最初の状態に戻ります。
マイコンの上に押しボタンスイッチがありますが、これを5回押せば同じ動作になりますね。
スイッチが押された事を検知しているのがB(4番端子)なので、この端子を5回、0Vにすればスイッチを5回押した事と同じになります。
仕組みは判りましたが、2番端子が5Vになった事を瞬時に検知して、4番端子を正確なタイミングで5回ON/OFFするには、PICマイコンにお任せするしかありません。
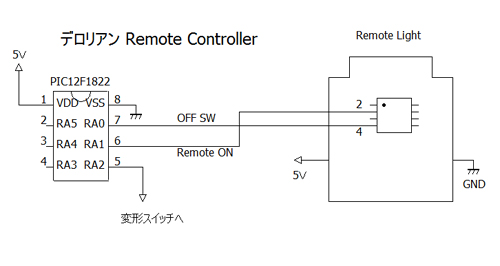
この様な回路になります。
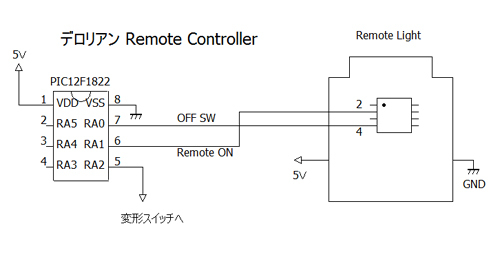
リモコンのONボタンが押され、受信機の2番端子が5V(正確には4.4Vでした)になった事を、RA1端子で検知したら、RA2端子を5Vから0Vにして、デロリアンの変形スイッチを押したのと同じ事にして変形動作をスタートさせます。
次にRA0端子を5回ON/OFFして、4番端子へボタンを5回押した様に見せかけ、ライトをリセットしてまた待機状態に戻せば良いですね。
つまり、PICでライトを上手く騙してしまうわけです。
プログラムはこの様になります。
初期設定部分は省略しています(このままでは動きません)
1~8 基本設定をしています
9 RA3の他、RA1を入力に設定します(右から0123・・と反対向)
11 受信機のボタンを押されていない状態「H」にしておきます
12 手動変形スイッチをOFF「H」にしておきます
15 ここから29行まで永久ループです
16 リモコンのONボタンが押され、白色LEDを点灯させようとすると、
2番端子がHになり、PICのRA1端子も1になります
17 RA2を0にして、変形のスイッチを押された状態にして作動させます
18 相手のPICが0を検出する時間100ms待ちます
19 スイッチをOFFに戻します
21 モーターが起動するとき電圧が不安定になるので、ちょっと待ちます
22~27 RA0を30ms間隔で5回ON/OFFして、受信機に5回ボタンが
押されたと思わせてリセットします
29 またRA1が1になるのを待ち続けます
この様に、手動で操作することを、PICで正確に行っているだけですね。
受信機の配線パターンを読んだと書きましたが、裏からライトで照らすと判り易いです。
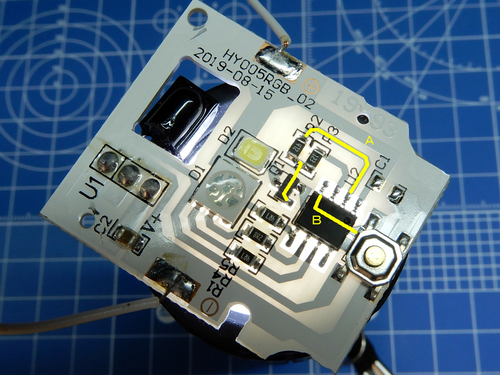
裏側からもよく見ると、黄色の線で繋がっているのがわかるので、どの端子にどんな信号が行っているのか判別することができました。
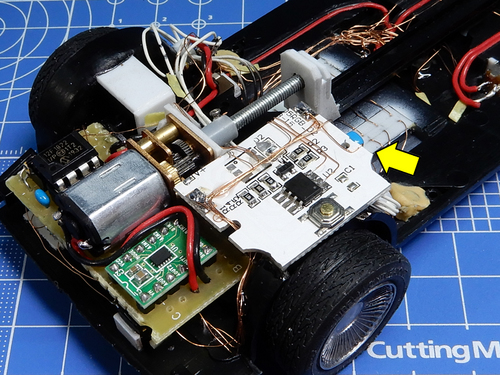
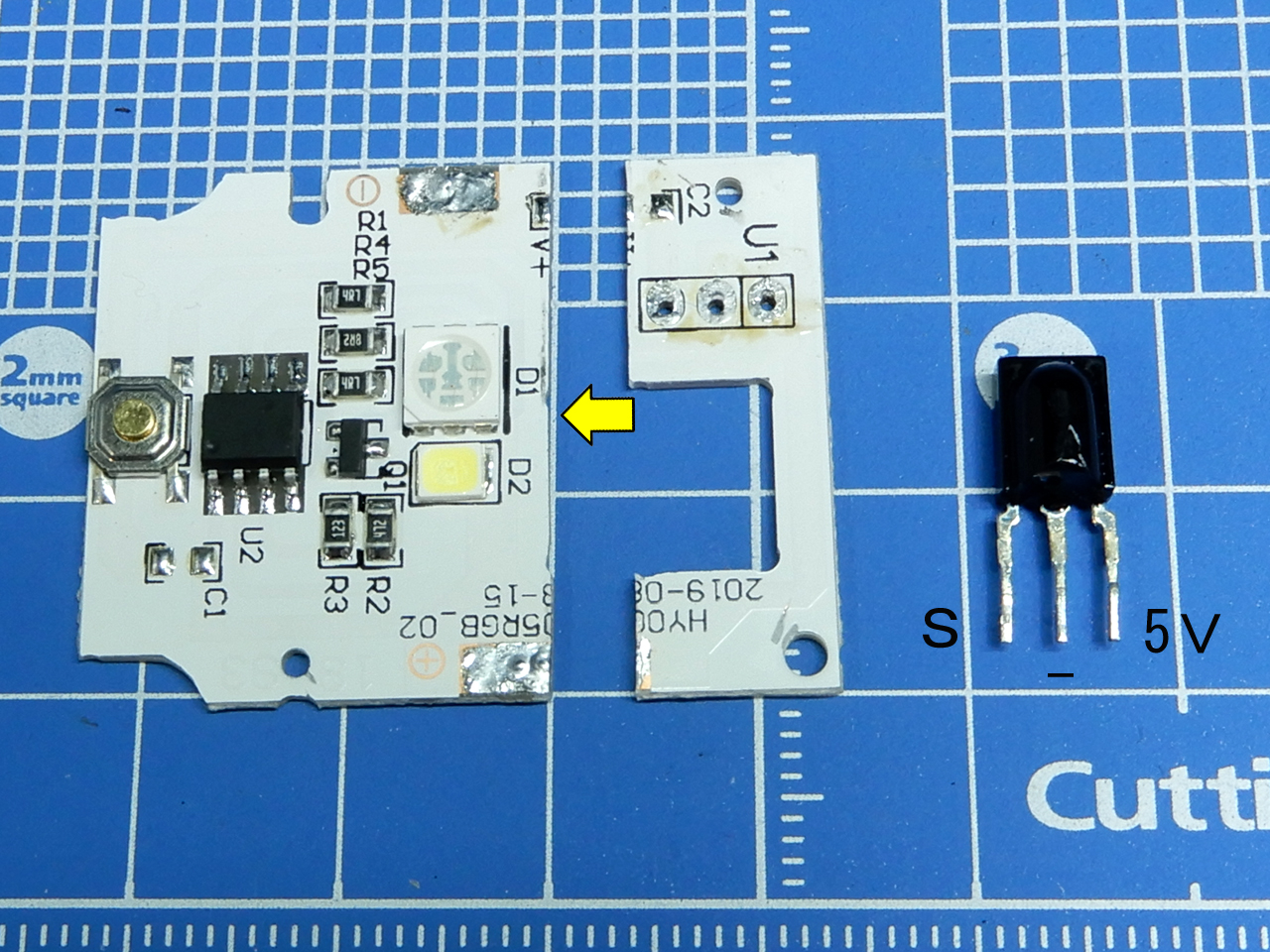
んで、このままでは基板が大きくて収まらないため、どこでカットするかも検討します。
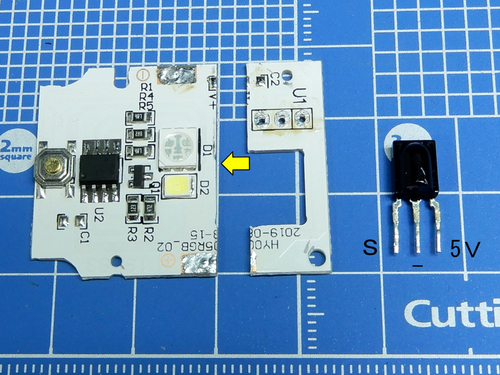
この様にカットしました。
赤外線の受光部は、膨らんでいる方を上にして、右から5V,GND、出力となっています。
出力はD1と書いてある部分のパターンに繋がっていましたので、配線で繋げば受光部を好きな場所へ引き回せますね。
スペース確保のため、タイヤボックスをカットしました
ボンネットとのスキマに潜り込ませるので、タイヤボックスをカットして受信機の収納スペースを作ります。
ここは余程覗き込まないと見えない部分なので、美観を損なう事は無いでしょう。
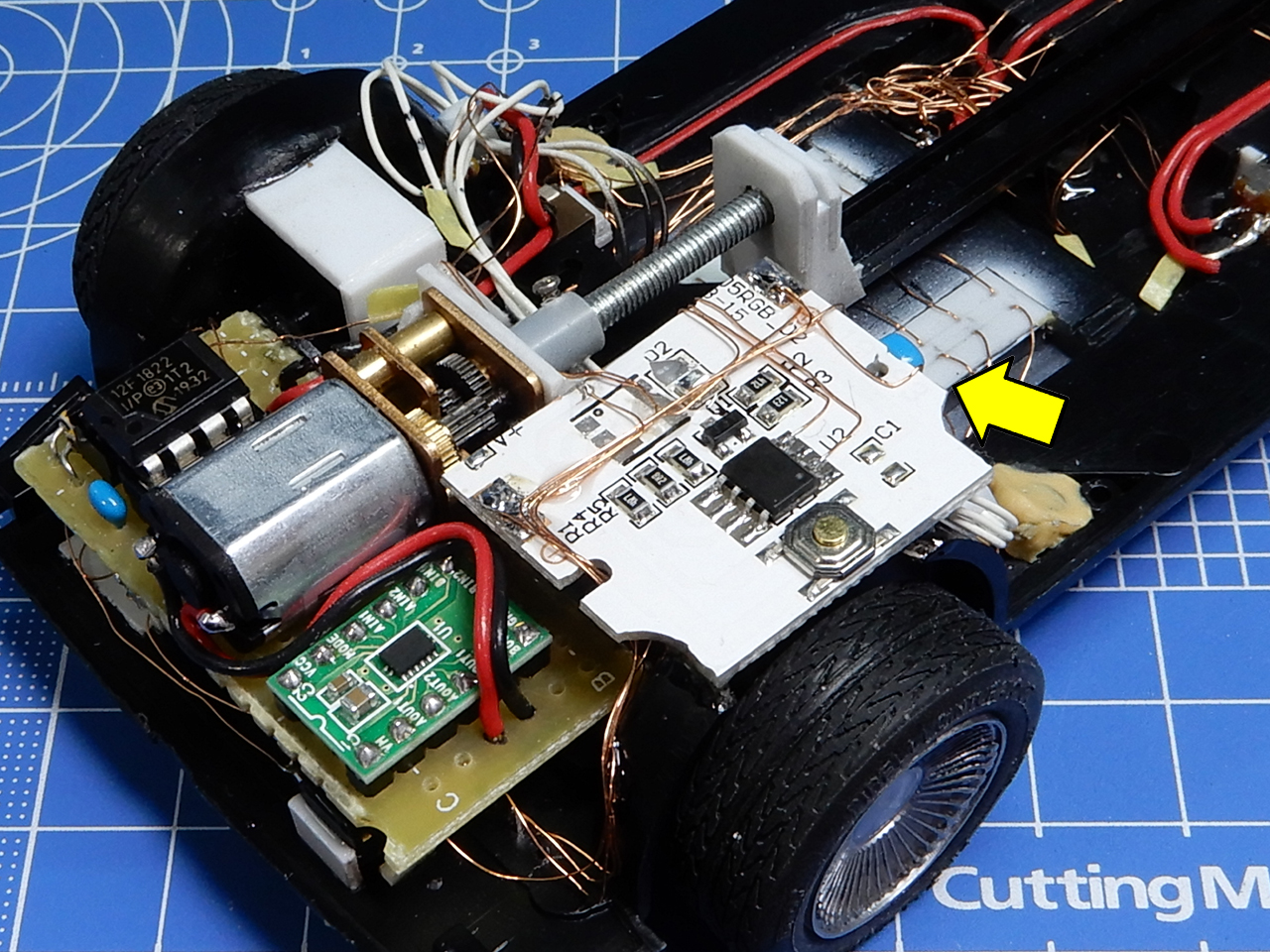
リモコン受信機を取り付けました。
受信機の基板やパーツが薄いので助かりました。
何とかボンネットとのスキマに収まっています。
元々付いていたLEDは、点灯しちゃっても困るので、白色もフルカラーも取り外してしまいました。
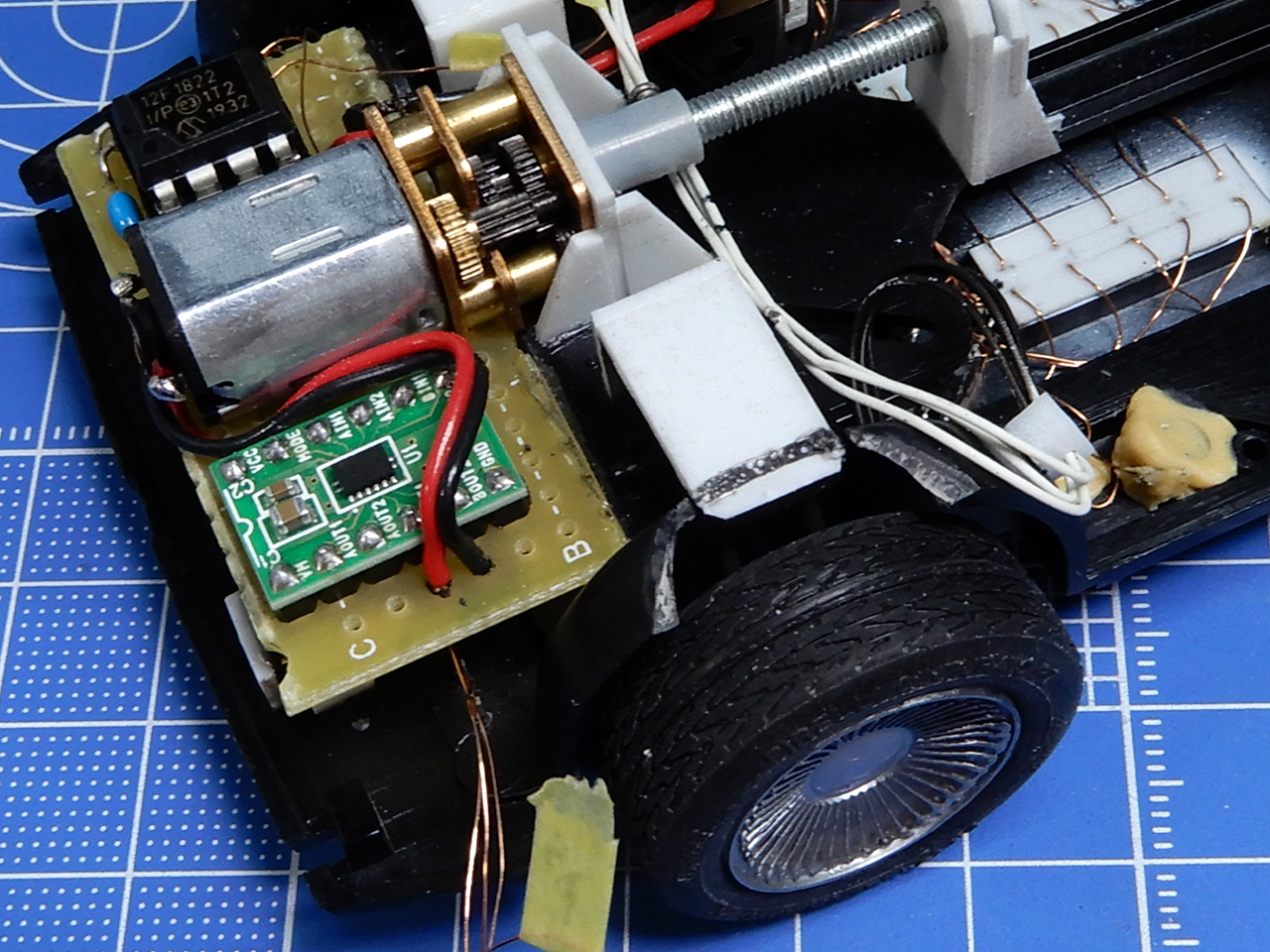
コントロールするPICは、受信機の裏側に取り付けました(すみません、写真を撮り忘れました)
なお、基板をカットした時、電圧安定用のコンデンサを外してしまったので、0.1μFのセラミックコンデンサ(水色の頭が見えています)をここに追加しています。
赤外線の受光部は、5V、GND、出力の3本の線で引き出して、シャーシの下部に取り付けました。

ここなら目立たないのですが、本当は外観を変える工作はしたくなかったです。
でも、受信感度を良くするにはこの場所が最適ですので、シブシブ取り付けました。
おかげで、3mくらい離れたところからでも、変形をコントロール出来るようになりました。
このセンサーは、ナカナカ感度が良いようです。
動作の様子は、YouTubeにアップしました。
送信機も、いかにも「リモコンです」な形なので、出来ればPART1でドクが操作していたプロポの形にしたいですね。
とりあえず上手く操作できるようにはなったので、あとでじっくり製作したいと思います。
これでシャーシ部分の工作は全て終了しました。
一応、イメージしていた改造は全て達成することが出来ました。
次はいよいよボディーの工作に着手したいと思います。
よろしくお付き合い下さいね。
※この記事は、市販品の改造になります。 実施される場合は、自己責任でお願いします。
車体下にスイッチを取り付け、走行/飛行形態の切替を可能にしましたが、見えない場所なので、どうも押しにくいです。
そこで、リモコン操作を可能にしてみました。
リモコン回路は、手っ取り早く100均のリモコンライトを流用しちゃいます。

電源ONで白色LEDが点灯し、赤・緑・青のLEDとその中間色をボタン一発で切り替えられて、しかも自動変化モードもあるので、ナカナカ楽しめるイルミネーションです。
今回はスイッチ1個をONにするだけで良いので、白色LEDを光らせる部分だけを使います。
実は今月のModelGraphix誌に掲載して頂いたED-209も、この回路を使ってリモコン化しています。
受信機を分解して、回路を取り出しました。
8本足のICがマイコンで、赤外線で受信した信号を判別して白色LEDやフルカラーLEDを制御しているのが判ります。
基板のパターンを見ると、マイコンのA(2番端子)が「H」(5V)になると、白色LEDが点灯するようです。
でも、点灯したままでは、ずっと「H」のままですので、困りますね。
元の消えた状態に戻ってくれないと、スイッチがずっとONのままです。
このイルミネーションライトは、白色LEDが点灯してから乳白色のドームを押す度に色が変わって、5回押すと全てのLEDが消えて、最初の状態に戻ります。
マイコンの上に押しボタンスイッチがありますが、これを5回押せば同じ動作になりますね。
スイッチが押された事を検知しているのがB(4番端子)なので、この端子を5回、0Vにすればスイッチを5回押した事と同じになります。
仕組みは判りましたが、2番端子が5Vになった事を瞬時に検知して、4番端子を正確なタイミングで5回ON/OFFするには、PICマイコンにお任せするしかありません。
この様な回路になります。
リモコンのONボタンが押され、受信機の2番端子が5V(正確には4.4Vでした)になった事を、RA1端子で検知したら、RA2端子を5Vから0Vにして、デロリアンの変形スイッチを押したのと同じ事にして変形動作をスタートさせます。
次にRA0端子を5回ON/OFFして、4番端子へボタンを5回押した様に見せかけ、ライトをリセットしてまた待機状態に戻せば良いですね。
つまり、PICでライトを上手く騙してしまうわけです。
プログラムはこの様になります。
初期設定部分は省略しています(このままでは動きません)
#include//#include "stdlib.h" //rand関数を使う時は有効にする #define _XTAL_FREQ 8000000 //delay関数を使う時は有効にする void main(void) { OSCCON = 0b01110010; //内部クロック8MHz 4MHzは0b01101010 ANSELA = 0b00000000; // アナログは使用しない(すべてデジタルI/Oに割当てる) TRISA = 0b00001010; // RA3は入力専用。RA1を入力に設定する PORTA = 0; // 出力ピンの初期化(全てLOWにする) RA0=1; //ボタンを5回押すピン プルアップしておく RA2=1; //変形SWへの信号 1:OFF 0:ON int i; while(1){ if(RA1==1){ //リモコン入力待ち RA2=0; //変形SW ON __delay_ms(100); //相手のPIC受信待ち RA2=1; //変形SW OFF __delay_ms(3000); //モーター起動電流安定待ち for(i=0;i<5;i++){ //リモコンOFF ボタン5回押す RA0=0; __delay_ms(30); RA0=1; __delay_ms(30); } //end of for i } } //End of while } //End of main
1~8 基本設定をしています
9 RA3の他、RA1を入力に設定します(右から0123・・と反対向)
11 受信機のボタンを押されていない状態「H」にしておきます
12 手動変形スイッチをOFF「H」にしておきます
15 ここから29行まで永久ループです
16 リモコンのONボタンが押され、白色LEDを点灯させようとすると、
2番端子がHになり、PICのRA1端子も1になります
17 RA2を0にして、変形のスイッチを押された状態にして作動させます
18 相手のPICが0を検出する時間100ms待ちます
19 スイッチをOFFに戻します
21 モーターが起動するとき電圧が不安定になるので、ちょっと待ちます
22~27 RA0を30ms間隔で5回ON/OFFして、受信機に5回ボタンが
押されたと思わせてリセットします
29 またRA1が1になるのを待ち続けます
この様に、手動で操作することを、PICで正確に行っているだけですね。
受信機の配線パターンを読んだと書きましたが、裏からライトで照らすと判り易いです。
裏側からもよく見ると、黄色の線で繋がっているのがわかるので、どの端子にどんな信号が行っているのか判別することができました。
んで、このままでは基板が大きくて収まらないため、どこでカットするかも検討します。
この様にカットしました。
赤外線の受光部は、膨らんでいる方を上にして、右から5V,GND、出力となっています。
出力はD1と書いてある部分のパターンに繋がっていましたので、配線で繋げば受光部を好きな場所へ引き回せますね。
スペース確保のため、タイヤボックスをカットしました
ボンネットとのスキマに潜り込ませるので、タイヤボックスをカットして受信機の収納スペースを作ります。
ここは余程覗き込まないと見えない部分なので、美観を損なう事は無いでしょう。
リモコン受信機を取り付けました。
受信機の基板やパーツが薄いので助かりました。
何とかボンネットとのスキマに収まっています。
元々付いていたLEDは、点灯しちゃっても困るので、白色もフルカラーも取り外してしまいました。
コントロールするPICは、受信機の裏側に取り付けました(すみません、写真を撮り忘れました)
なお、基板をカットした時、電圧安定用のコンデンサを外してしまったので、0.1μFのセラミックコンデンサ(水色の頭が見えています)をここに追加しています。
赤外線の受光部は、5V、GND、出力の3本の線で引き出して、シャーシの下部に取り付けました。

ここなら目立たないのですが、本当は外観を変える工作はしたくなかったです。
でも、受信感度を良くするにはこの場所が最適ですので、シブシブ取り付けました。
おかげで、3mくらい離れたところからでも、変形をコントロール出来るようになりました。
このセンサーは、ナカナカ感度が良いようです。
動作の様子は、YouTubeにアップしました。
送信機も、いかにも「リモコンです」な形なので、出来ればPART1でドクが操作していたプロポの形にしたいですね。
とりあえず上手く操作できるようにはなったので、あとでじっくり製作したいと思います。
これでシャーシ部分の工作は全て終了しました。
一応、イメージしていた改造は全て達成することが出来ました。
次はいよいよボディーの工作に着手したいと思います。
よろしくお付き合い下さいね。
2021-04-26 22:03
コメント(10)

お知らせ~
悪質なリンクを含んだ書き込みが
多発したため、URLを含んだコメント
は書込み出来ない設定にしました。
後了承下さいm(__)m
 「初心者用電飾模型工作入門
電飾しましょっ!」
どろぼうひげ/著 大日本絵画/刊
フルカラー96ページ 定価3,240円
模型を電飾したいけど、難しいのは無理!
何からすれば良いの?という超初心者へ
最短の近道をご案内いたします!
ただ今絶賛発売中です(^^)/
「初心者用電飾模型工作入門
電飾しましょっ!」
どろぼうひげ/著 大日本絵画/刊
フルカラー96ページ 定価3,240円
模型を電飾したいけど、難しいのは無理!
何からすれば良いの?という超初心者へ
最短の近道をご案内いたします!
ただ今絶賛発売中です(^^)/
 「電飾しましょっ!2 PIC編」好評発売中
B5判 88ページ 2500円+税
本書内容に不具合がある箇所についての
正誤表がMODELKASTENにて公開中です
PDFをダウンロードの上、ご活用下さい
正誤表のダウンロードはこちら
「電飾しましょっ!2 PIC編」好評発売中
B5判 88ページ 2500円+税
本書内容に不具合がある箇所についての
正誤表がMODELKASTENにて公開中です
PDFをダウンロードの上、ご活用下さい
正誤表のダウンロードはこちら
 「電飾しましょっ!3 Tips編」
B5判 107ページ 3200円+税
もう光るだけでは物足りない電飾モデラ
ーの皆さんへチョイテクを多数ご紹介!
PICでのモーター制御や調光まで網羅し
た、幅広く電飾を楽しめる一冊です(^^)/
「電飾しましょっ!3 Tips編」
B5判 107ページ 3200円+税
もう光るだけでは物足りない電飾モデラ
ーの皆さんへチョイテクを多数ご紹介!
PICでのモーター制御や調光まで網羅し
た、幅広く電飾を楽しめる一冊です(^^)/
 doro_hige という名前でさえずってます。
フォローよろしくです(^^♪
Follow @doro_hige
doro_hige という名前でさえずってます。
フォローよろしくです(^^♪
Follow @doro_hige
 DORO☆OFFの公式ブログです
展示会のサポートもこちらですよ
DORO☆OFFの公式ブログです
展示会のサポートもこちらですよ
多発したため、URLを含んだコメント
は書込み出来ない設定にしました。
後了承下さいm(__)m
| 「電飾しましょっ!」絶賛発売中! |
「初心者用電飾模型工作入門
電飾しましょっ!」
どろぼうひげ/著 大日本絵画/刊
フルカラー96ページ 定価3,240円
模型を電飾したいけど、難しいのは無理!
何からすれば良いの?という超初心者へ
最短の近道をご案内いたします!
ただ今絶賛発売中です(^^)/
| 「電飾しましょっ!2 PIC編」発売中! |
「電飾しましょっ!2 PIC編」好評発売中
B5判 88ページ 2500円+税
本書内容に不具合がある箇所についての
正誤表がMODELKASTENにて公開中です
PDFをダウンロードの上、ご活用下さい
正誤表のダウンロードはこちら
| 「電飾しましょっ!3 Tips編」発売中! |
「電飾しましょっ!3 Tips編」
B5判 107ページ 3200円+税
もう光るだけでは物足りない電飾モデラ
ーの皆さんへチョイテクを多数ご紹介!
PICでのモーター制御や調光まで網羅し
た、幅広く電飾を楽しめる一冊です(^^)/
| ツイッターやってます |
doro_hige という名前でさえずってます。
フォローよろしくです(^^♪
Follow @doro_hige
| DORO☆OFF公式ブログ |
DORO☆OFFの公式ブログです
展示会のサポートもこちらですよ
模型誌 掲載作品
各模型誌に掲載された作品です
 ModelGraphics No.292 2009.3 に掲載されました。
詳細はカテゴリー「スター・デストロイヤー 製作記」をご覧下さい。
ModelGraphics No.292 2009.3 に掲載されました。
詳細はカテゴリー「スター・デストロイヤー 製作記」をご覧下さい。
 2009.4 キャラクターエイジ VOL.02 に掲載されました。
詳細はカテゴリー「CA掲載ジオラマ制作記」をご覧下さい。
2009.4 キャラクターエイジ VOL.02 に掲載されました。
詳細はカテゴリー「CA掲載ジオラマ制作記」をご覧下さい。
 2009.9 キャラクターエイジ VOL.03 に掲載されました。
詳細はカテゴリー「CA3 エコー基地 製作記」をご覧下さい。
2009.9 キャラクターエイジ VOL.03 に掲載されました。
詳細はカテゴリー「CA3 エコー基地 製作記」をご覧下さい。
 2009.12 ModelGraphix No.302 に掲載されました。
詳細はカテゴリー「FM SnowSpeeder 製作記」をご覧下さい。
2009.12 ModelGraphix No.302 に掲載されました。
詳細はカテゴリー「FM SnowSpeeder 製作記」をご覧下さい。
 2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「CA4 HomeOne 製作記」をご覧下さい。
2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「CA4 HomeOne 製作記」をご覧下さい。
 2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「A-Wing Fighter製作記」をご覧下さい。
2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「A-Wing Fighter製作記」をご覧下さい。
 2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
 2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
 2011.05キャラクターエイジVol.06に掲載
詳細はCA6 1/48 TIE FIGHTER 製作記
をご覧下さい。
ランダム閃光発生回路の説明動画へ
2011.05キャラクターエイジVol.06に掲載
詳細はCA6 1/48 TIE FIGHTER 製作記
をご覧下さい。
ランダム閃光発生回路の説明動画へ
 2012.03 ModelGraphix 2012.04
に掲載させて頂きました。
詳細はNaboo StarFighter 製作記
をご覧下さい。
2012.03 ModelGraphix 2012.04
に掲載させて頂きました。
詳細はNaboo StarFighter 製作記
をご覧下さい。
 2012.11 Scale World Vol.2 に掲載
させて頂きました。
DVD付きで動画も楽しめます(^^)/
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
2012.11 Scale World Vol.2 に掲載
させて頂きました。
DVD付きで動画も楽しめます(^^)/
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
 2013.10 HobbyJapan 2013.11 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
2013.10 HobbyJapan 2013.11 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
 2013.10 ModelGraphix 2013.11に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
詳しい製作記はこちら
2013.10 ModelGraphix 2013.11に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
詳しい製作記はこちら
 2013.11 ModelGraphix 2013.12 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
2013.11 ModelGraphix 2013.12 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
") 2013.12 ModelGraphix 2014.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
製作記はこちら(Build Article Here)
2013.12 ModelGraphix 2014.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
製作記はこちら(Build Article Here)
 2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像と動画が表示されます
2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像と動画が表示されます
 2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
") 2014.04 ModelGraphix 2014.05 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
2014.04 ModelGraphix 2014.05 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 2014.05 ModelGraphix 2014.06 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
2014.05 ModelGraphix 2014.06 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 2014.06 HobbyJapan 2014.07 に
掲載させて頂きました。
バルグレイの完成画像はこちら
デバッケの完成画像はこちら
2014.06 HobbyJapan 2014.07 に
掲載させて頂きました。
バルグレイの完成画像はこちら
デバッケの完成画像はこちら
 2014.08 HobbyJapan 2014.08に
掲載させて頂きました。
シャングリ・ラーの完成画像と動画はこちら
デラメア級の完成画像はこちら
2014.08 HobbyJapan 2014.08に
掲載させて頂きました。
シャングリ・ラーの完成画像と動画はこちら
デラメア級の完成画像はこちら
 ModelGraphix 2014.09 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
ModelGraphix 2014.09 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
 ModelGraphix 2014.11 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix 2014.11 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 HobbyJapan 2015.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
HobbyJapan 2015.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2015.02 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌 2015.02 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 HobbyJapan誌 2015.02 に掲載、更に
作例集”星巡る方舟”編に掲載頂きました
ギミック満載の動画を公開しています
HobbyJapan誌 2015.02 に掲載、更に
作例集”星巡る方舟”編に掲載頂きました
ギミック満載の動画を公開しています

 HobbyJapan誌 2015.03 に掲載。更に
作例集”星巡る方舟”編に掲載頂きました
上の画像クリックで完成画像が表示されます
HobbyJapan誌 2015.03 に掲載。更に
作例集”星巡る方舟”編に掲載頂きました
上の画像クリックで完成画像が表示されます
 ModelGraphix誌2015.05 No.366 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌2015.05 No.366 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2015.08 No.369 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌 2015.08 No.369 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌2015.06 No.367 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌2015.06 No.367 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2015.09 No.370 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌 2015.09 No.370 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 HobbyJapan誌 2015.11 No.557 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
HobbyJapan誌 2015.11 No.557 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2016.01 No.374 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
ModelGraphix誌 2016.01 No.374 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
 ModelGraphix誌 2016.02 No.375 に
掲載させて頂きました。
上の画像クリックで完成画像がが表示されます
ModelGraphix誌 2016.02 No.375 に
掲載させて頂きました。
上の画像クリックで完成画像がが表示されます
 ModelGraphix誌 2016.03 No.376に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
ModelGraphix誌 2016.03 No.376に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
 HobbyJapan誌 2016.03 No.561に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
HobbyJapan誌 2016.03 No.561に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
 ModelArt別冊、艦船模型スペシャル誌
2016 SPRING No.59 に
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
ModelArt別冊、艦船模型スペシャル誌
2016 SPRING No.59 に
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJAPAN誌 2016.04 No.561へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJAPAN誌 2016.04 No.561へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.06 No.564へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.06 No.564へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 ModelGraphix誌 2016.07 No.380 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
ModelGraphix誌 2016.07 No.380 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.07 No.565 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.07 No.565 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.09 No.567 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.09 No.567 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.10 No.568 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.10 No.568 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.11 No.569 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.11 No.569 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2016.12 No570 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2016.12 No570 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.02 No.572 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2017.02 No.572 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 ModelGraphix誌 2017.02 No.387 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
ModelGraphix誌 2017.02 No.387 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 ModelGraphix誌 2017.04 No.389 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
ModelGraphix誌 2017.04 No.389 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
 HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
完成画像はありません。
上の画像クリックで製作記
が表示されます
HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
完成画像はありません。
上の画像クリックで製作記
が表示されます
| Lot No.S-001 スターデストロイヤー |
ModelGraphics No.292 2009.3 に掲載されました。
詳細はカテゴリー「スター・デストロイヤー 製作記」をご覧下さい。
| Lot No.S-002 ホス&DSトレンチバトル |
2009.4 キャラクターエイジ VOL.02 に掲載されました。
詳細はカテゴリー「CA掲載ジオラマ制作記」をご覧下さい。
| Lot No.S-003 REBEL BASE |
2009.9 キャラクターエイジ VOL.03 に掲載されました。
詳細はカテゴリー「CA3 エコー基地 製作記」をご覧下さい。
| Lot No.S-004 FM SnowSpeeder |
2009.12 ModelGraphix No.302 に掲載されました。
詳細はカテゴリー「FM SnowSpeeder 製作記」をご覧下さい。
| Lot No.S-005 HomeOne |
2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「CA4 HomeOne 製作記」をご覧下さい。
| Lot No.S-006 A-Wing StarFighter |
2010.03 キャラクターエイジ Vol.04に掲載されました。
詳細はカテゴリー「A-Wing Fighter製作記」をご覧下さい。
| Lot No.S-007 CA5 VC4 シャトル |
2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
| Lot No.S-008 CA5 VC4 スレーブ1 |
2010.11 キャラクターエイジ Vol.05に掲載されました。
詳細はカテゴリー「CA5 シャトル&スレーブ1製作記」を
ご覧下さい。
| Lot No.S-009 CA6 TIE FIGHTER |
2011.05キャラクターエイジVol.06に掲載
詳細はCA6 1/48 TIE FIGHTER 製作記
をご覧下さい。
ランダム閃光発生回路の説明動画へ
| Lot No.S-010 Naboo StarFighter |
2012.03 ModelGraphix 2012.04
に掲載させて頂きました。
詳細はNaboo StarFighter 製作記
をご覧下さい。
| Lot No.S-011 フジミ SPINNER |
2012.11 Scale World Vol.2 に掲載
させて頂きました。
DVD付きで動画も楽しめます(^^)/
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
| Lot No.S-012 ゲルバデス級 ダロルド |
2013.10 HobbyJapan 2013.11 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
| Lot No.S-013 Viper Mk.Ⅱ |
2013.10 ModelGraphix 2013.11に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
詳しい製作記はこちら| Lot No.S-014 次元潜航艦 UX-01 |
2013.11 ModelGraphix 2013.12 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
| Lot No.S-015 BS GALACTICA |
2013.12 ModelGraphix 2014.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
製作記はこちら(Build Article Here) | Lot No.S-016 ヤマト2199 |
2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像と動画が表示されます
| Lot No.S-017 シュデルグ |
2014.02 ModelGraphix 2014.03 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-018 BS PEGASUS |
2014.04 ModelGraphix 2014.05 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-019 ギガント |
2014.05 ModelGraphix 2014.06 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-020 バルグレイ |
2014.06 HobbyJapan 2014.07 に
掲載させて頂きました。
バルグレイの完成画像はこちら
デバッケの完成画像はこちら
| Lot No.S-021 シャングリ・ラー |
2014.08 HobbyJapan 2014.08に
掲載させて頂きました。
シャングリ・ラーの完成画像と動画はこちら
デラメア級の完成画像はこちら
| Lot No.S-022 AU-O9 アナライザー |
ModelGraphix 2014.09 に
掲載させて頂きました。
上の画像クリックで製作記が表示されます
| Lot No.S-023 ドメラーズⅢvsヤマト |
ModelGraphix 2014.11 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-024 N-ノーチラス号 |
HobbyJapan 2015.01 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-025 X-WING RED 3 |
ModelGraphix誌 2015.02 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-026 1/500 ヤマト2199 |
 HobbyJapan誌 2015.02 に掲載、更に
作例集”星巡る方舟”編に掲載頂きました
ギミック満載の動画を公開しています
HobbyJapan誌 2015.02 に掲載、更に
作例集”星巡る方舟”編に掲載頂きました
ギミック満載の動画を公開しています
| Lot No.S-027 ミランガル |
HobbyJapan誌 2015.03 に掲載。更に
作例集”星巡る方舟”編に掲載頂きました
上の画像クリックで完成画像が表示されます
| Lot No.S-028 AT-ST |
ModelGraphix誌2015.05 No.366 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-029 バラクーダ号 |
ModelGraphix誌 2015.08 No.369 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-030 1/48 X-WING |
ModelGraphix誌2015.06 No.367 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-031 Y-WING GOLD2 |
ModelGraphix誌 2015.09 No.370 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-032 マクロス要塞艦 |
HobbyJapan誌 2015.11 No.557 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-033 EP.Ⅶ ファルコン |
ModelGraphix誌 2016.01 No.374 に
掲載させて頂きました。
上の画像クリックで完成画像が表示されます
| Lot No.S-034 グフカスタム |
ModelGraphix誌 2016.02 No.375 に
掲載させて頂きました。
上の画像クリックで完成画像がが表示されます
| Lot No.S-035 ハンタキラータンク |
ModelGraphix誌 2016.03 No.376に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
| Lot No.S-036 メカコレ ヤマト・ランベア |
HobbyJapan誌 2016.03 No.561に
掲載させて頂きました。
上の画像クリックで完成画像と動画の記事
が表示されます
| Lot No.S-037 護衛艦あきづき |
ModelArt別冊、艦船模型スペシャル誌
2016 SPRING No.59 に
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-038 アスタコNEO |
HobbyJAPAN誌 2016.04 No.561へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-039 VM スタデ&X-WING |
HobbyJapan誌 2016.06 No.564へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-040 バンダイ A-WING |
ModelGraphix誌 2016.07 No.380 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-041 サンダーバード 2・4 号 |
HobbyJapan誌 2016.07 No.565 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-042 はしご付き消防車 |
HobbyJapan誌 2016.09 No.567 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-043 VM Poe'sX & FO TIE |
HobbyJapan誌 2016.10 No.568 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-044 マクロスエリシオン |
HobbyJapan誌 2016.11 No.569 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-045 VM Y-WING |
HobbyJapan誌 2016.12 No570 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-046 VM ファルコン |
HobbyJapan誌 2017.02 No.572 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-047 R.o. X-WING RED1 |
ModelGraphix誌 2017.02 No.387 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-048 VM タイセット |
HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-049 U-WING & タイセット |
HobbyJapan誌 2017.04 No.574 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-050 FMタイガーモス |
ModelGraphix誌 2017.04 No.389 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-051 アンドロメダ2202 |
HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
上の画像クリックで完成画像の記事
が表示されます
| Lot No.S-052 レイズナーヘッド |
HobbyJapan誌 2017.05 No.575 へ
掲載させて頂きました。
完成画像はありません。
上の画像クリックで製作記
が表示されます
製作記 STAR WARS 作品
| Lot No.001 ミレニアム・ファルコン |

| Lot No.003 SLAVE 1 |

| Lot No.004 X-WING |

| Lot No.007 シャトル・タイデリアム |
 2007-06-06 完成しました。
完成画像はこちら
カテゴリー「シャトル・タイデリアム製作記」
2007-06-06 完成しました。
完成画像はこちら
カテゴリー「シャトル・タイデリアム製作記」
| Lot No.011 Y-Wing |
 2007-08-21 完成しました。
完成画像はこちら
カテゴリー「Y-Wing製作記」
2007-08-21 完成しました。
完成画像はこちら
カテゴリー「Y-Wing製作記」
| Lot No.012 スター・デストロイヤー |
 2008-05-19 完成しました。
「模型誌掲載作品」へ移動しました。
2008-05-19 完成しました。
「模型誌掲載作品」へ移動しました。
| Lot No.014 JEDI STAR FIGHTER |
 2008-06-28 完成しました。
完成画像はこちら
カテゴリー「JEDI STAR FIGHTER 製作記」
2008-06-28 完成しました。
完成画像はこちら
カテゴリー「JEDI STAR FIGHTER 製作記」
| Lot No.016 mpc AT-AT |
 2008-09-06 完成しました。
完成画像はこちら
カテゴリー「mpc AT-AT 製作記」
2008-09-06 完成しました。
完成画像はこちら
カテゴリー「mpc AT-AT 製作記」
| Lot No.017 TIE INTERCEPTOR |
 2008-10-10 完成しました。
完成画像はこちら
2008-10-10 完成しました。
完成画像はこちら
| Lot No.018 Deth Star Surface |
 2008-10-27 完成しました。
完成画像はこちら
2008-10-27 完成しました。
完成画像はこちら
| Lot No.019 A-Wing Fighter |
 2008.12.16 完成しました。。
完成画像はこちら
カテゴリー「A-Wing Fighter 製作記」
2008.12.16 完成しました。。
完成画像はこちら
カテゴリー「A-Wing Fighter 製作記」
| Lot No.022 1/48 X-Wing Fighter |
 2009-05-15 完成しました。
完成画像はこちら
2009-05-15 完成しました。
完成画像はこちら| Lot No.027 FM 1/144 Falcon |
 2010.08.20 完成しました。
完成画像はこちら
カテゴリー「FM 144ファルコン 製作記」
2010.08.20 完成しました。
完成画像はこちら
カテゴリー「FM 144ファルコン 製作記」
| Lot No.031 VC4 スターデストロイヤー |
 完成画像はこちら
カテゴリー「VC4 スター・デストロイヤー 製作記」
完成画像はこちら
カテゴリー「VC4 スター・デストロイヤー 製作記」
| Lot No.021 Death Star Ⅱ |
 デススターⅡをフルスクラッチしました。
完成画像はこちら
製作過程を交えた完成ムービーはこちら
カテゴリー「Death Star Ⅱ 製作記」
デススターⅡをフルスクラッチしました。
完成画像はこちら
製作過程を交えた完成ムービーはこちら
カテゴリー「Death Star Ⅱ 製作記」
製作記 スタジオジブリ 作品







製作記 キャラクターもの
| Lot No.002 頭文字Dトレノ |

| Lot No.008 ザク Ver2.0 |
 2007-06-22 完成しました。
完成画像はこちら
カテゴリー「ザクVer2.0製作記」では、制作過程を紹介しています。
2007-06-22 完成しました。
完成画像はこちら
カテゴリー「ザクVer2.0製作記」では、制作過程を紹介しています。
| Lot No.015 AVP2エイリアン リペイント |
 2008-07-05 完成しました。
完成画像はこちら
カテゴリー「ALIEN リペイント」では、制作過程を紹介しています。
2008-07-05 完成しました。
完成画像はこちら
カテゴリー「ALIEN リペイント」では、制作過程を紹介しています。
| Lot No.023 アオシマ T-800 |
 2009-09-07 完成しました。
完成画像はこちら
首の電動化の動画はこちら
2009-09-07 完成しました。
完成画像はこちら
首の電動化の動画はこちら
| Lot No.024 MGアイマス機 双海真美 |
 2009-12-20 完成しました。
完成画像はこちら
2009-12-20 完成しました。
完成画像はこちら
| Lot No.026 Ma.K ポーラーベアー |
 2010-05-04 完成しました。
完成画像はこちら
2010-05-04 完成しました。
完成画像はこちら
| Lot No.028 ロボコップ ED-209 |
 2010-10-02 完成しました。
完成画像はこちら
2010-10-02 完成しました。
完成画像はこちら
| Lot No.034 Ma.k.クレーテ |
 完成画像はこちら
完成画像はこちら
| Lot No.035 LBX パンドラ |
 完成画像はこちら
完成画像はこちら
| Lot No.037 フジミ SPINNER |
 2012-08-30 完成しました。
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
2012-08-30 完成しました。
完成画像 スピナー編はこちら
完成画像 ベース編はこちら
| Lot No.038 ごあいさつダンボー |
 上の画像クリックで製作記と動画へGo
上の画像クリックで製作記と動画へGo
| Lot No.041 LastExile ヴァンシップ |
 2013-03-03 完成しました。
画像クリックで完成画像と動画へGo
2013-03-03 完成しました。
画像クリックで完成画像と動画へGo
| Lot No.043 デコトラ「天下御免」 |
 2013.1頃に完成しています
画像クリックで完成画像と動画へGo
2013.1頃に完成しています
画像クリックで完成画像と動画へGo
製作記 宇宙船など
| Lot No.005 コスモゼロ |
 2007-03-03 完成しました。
完成画像はこちら
2007-03-03 完成しました。
完成画像はこちら
| Lot No.006 ブラックタイガー |
 2007-03-12 完成しました♪
完成画像はこちら
2007-03-12 完成しました♪
完成画像はこちら
| Lot No.009 BIRD OF PREY |
 2007-07-08 完成しました♪
完成画像はこちら
2007-07-08 完成しました♪
完成画像はこちら
| Lot No.045 メカコレヤマト2199 |
 2014-05-31 完成しました♪
完成画像と発射の動画はこちら
2014-05-31 完成しました♪
完成画像と発射の動画はこちら
| Lot No.010 ノストロモ号 |
 2005-12-18 完成しました♪
完成画像はこちら
2005-12-18 完成しました♪
完成画像はこちら
| Lot No.013 たまごスペースシャトル |
 2008-06-05 完成しました♪
完成画像はこちら
2008-06-05 完成しました♪
完成画像はこちら
| Lot No.025 DVD特典 宇宙戦艦ヤマト |
 2010-04-05 完成しました。
完成画像はこちら
2010-04-05 完成しました。
完成画像はこちら
| Lot No.033 Space Clipper |
 2012-02-13 完成しました。
完成画像はこちら
2012-02-13 完成しました。
完成画像はこちら
| Lot No.039 アルカディア号 |
 1012-11-20完成しました。
完成画像はこちら
1012-11-20完成しました。
完成画像はこちら| Lot No.048 シルフィード |
 16BitModels用として製作しました
2017.09完成しました。
16BitModels用として製作しました
2017.09完成しました。
